Better Monocular 3D Detectors with LiDAR from the Past
2404.05139
0
0
Abstract
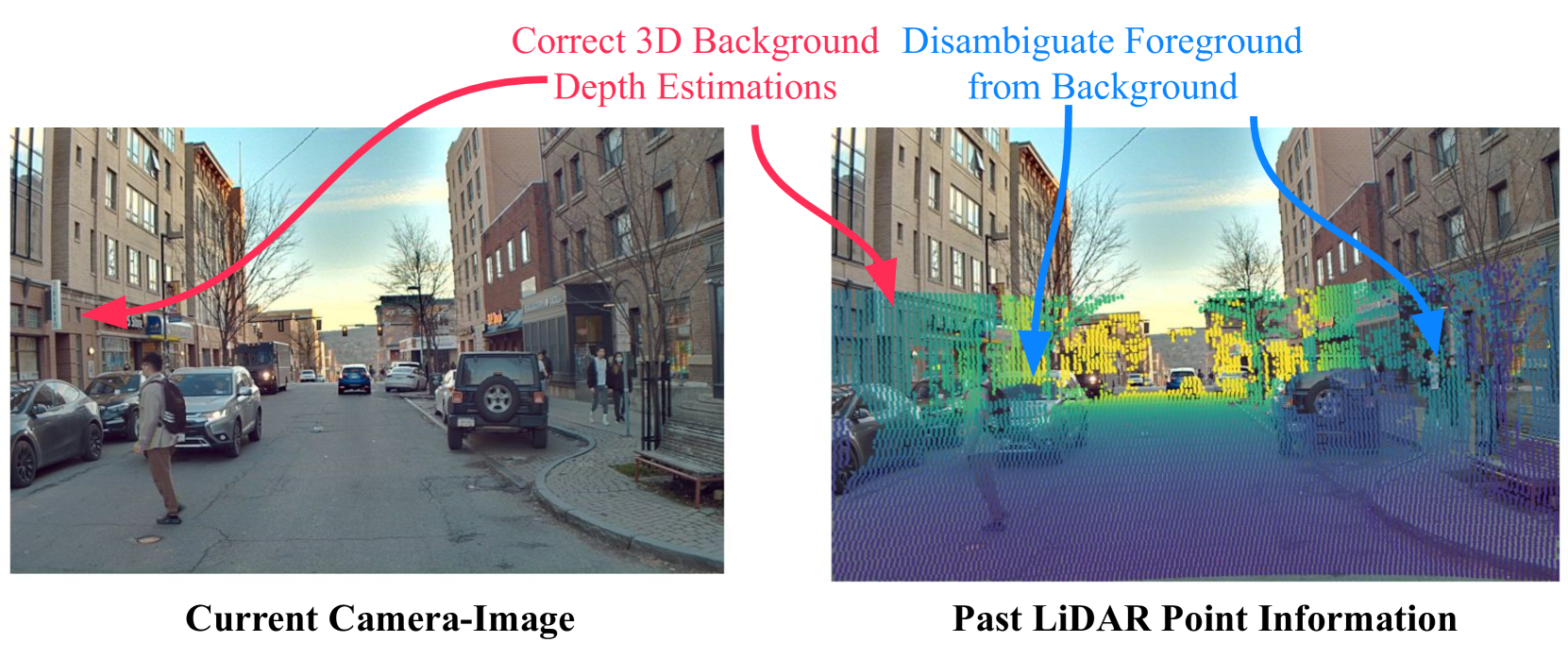
Accurate 3D object detection is crucial to autonomous driving. Though LiDAR-based detectors have achieved impressive performance, the high cost of LiDAR sensors precludes their widespread adoption in affordable vehicles. Camera-based detectors are cheaper alternatives but often suffer inferior performance compared to their LiDAR-based counterparts due to inherent depth ambiguities in images. In this work, we seek to improve monocular 3D detectors by leveraging unlabeled historical LiDAR data. Specifically, at inference time, we assume that the camera-based detectors have access to multiple unlabeled LiDAR scans from past traversals at locations of interest (potentially from other high-end vehicles equipped with LiDAR sensors). Under this setup, we proposed a novel, simple, and end-to-end trainable framework, termed AsyncDepth, to effectively extract relevant features from asynchronous LiDAR traversals of the same location for monocular 3D detectors. We show consistent and significant performance gain (up to 9 AP) across multiple state-of-the-art models and datasets with a negligible additional latency of 9.66 ms and a small storage cost.
Create account to get full access
Overview
- This paper presents a novel approach for improving monocular 3D object detection using LiDAR data from the past.
- The proposed method, called AsyncDepth, leverages historical LiDAR data to enhance the depth estimation in monocular 3D detectors.
- The authors demonstrate that AsyncDepth can outperform state-of-the-art monocular 3D detectors on several benchmark datasets.
Plain English Explanation
The paper discusses a way to make monocular 3D object detection (which uses a single camera) more accurate by using LiDAR data from the past. LiDAR is a technology that uses laser beams to measure distances and create 3D maps of the environment.
The key idea is to use historical LiDAR data, which provides accurate depth information, to improve the depth estimation in monocular 3D detectors. Monocular 3D detectors often struggle with accurately estimating the depth of objects, and this approach aims to overcome that limitation.
The proposed method, called AsyncDepth, works by incorporating the historical LiDAR data in a way that enhances the depth estimation in the monocular 3D detector. This allows the detector to better understand the 3D structure of the scene and identify objects more accurately.
The authors show that AsyncDepth outperforms other state-of-the-art monocular 3D detectors on several standard benchmark datasets, demonstrating the effectiveness of their approach.
Technical Explanation
The paper introduces a novel method called AsyncDepth that leverages historical LiDAR data to improve the performance of monocular 3D object detectors. Monocular 3D detectors, which only use a single camera, often struggle with accurately estimating the depth of objects, leading to suboptimal 3D detection performance.
To address this, the authors propose AsyncDepth, which incorporates historical LiDAR data to enhance the depth estimation in monocular 3D detectors. The key idea is to use the accurate depth information from the past LiDAR data to guide the depth estimation in the current monocular 3D detector.
The AsyncDepth architecture consists of three main components: a monocular 3D detector, a depth estimation module, and a LiDAR-guided depth refinement module. The monocular 3D detector first generates 2D bounding boxes and object proposals. The depth estimation module then predicts the depth of these proposals, and the LiDAR-guided depth refinement module uses the historical LiDAR data to refine the depth estimates.
The authors evaluate AsyncDepth on several benchmark datasets, including KITTI, nuScenes, and Waymo Open Dataset. The results show that AsyncDepth outperforms state-of-the-art monocular 3D detectors, particularly in terms of 3D detection accuracy.
The authors also conduct ablation studies to understand the individual contributions of the depth estimation module and the LiDAR-guided depth refinement module. The results indicate that the LiDAR-guided depth refinement is a key component in improving the 3D detection performance.
Critical Analysis
The paper presents a novel and promising approach for enhancing monocular 3D object detection using historical LiDAR data. The authors have conducted a thorough evaluation of their method and demonstrated its superiority over existing state-of-the-art monocular 3D detectors.
One potential limitation of the approach is the reliance on historical LiDAR data, which may not always be available or accurately registered with the current camera data. The authors acknowledge this and suggest that their method could be extended to leverage other depth sensors, such as depth-from-defocus or radar-based depth estimation.
Additionally, the performance of AsyncDepth may be influenced by the quality and coverage of the historical LiDAR data. If the LiDAR data is sparse or does not fully capture the scene, the depth refinement module may not be as effective. Further research could explore ways to address these potential limitations, such as exploring techniques for data augmentation or incorporating uncertainty estimates into the depth refinement process.
Overall, the paper presents a compelling approach that demonstrates the value of leveraging complementary sensor data to improve monocular 3D object detection. The authors have made a valuable contribution to the field, and their work could inspire further research into multimodal fusion techniques for enhancing 3D perception.
Conclusion
This paper introduces AsyncDepth, a novel method for improving monocular 3D object detection by leveraging historical LiDAR data. The key idea is to use the accurate depth information from past LiDAR scans to enhance the depth estimation in monocular 3D detectors, which often struggle with this task.
The authors have demonstrated that AsyncDepth outperforms state-of-the-art monocular 3D detectors on several benchmark datasets, highlighting the effectiveness of their approach. This work represents an important advancement in the field of 3D perception, as it shows how the fusion of complementary sensor data can lead to significant performance gains in monocular 3D object detection.
The paper's findings have the potential to benefit a wide range of applications, from autonomous vehicles to robotics and surveillance systems, where accurate 3D object detection is critical. The authors' work also opens up new avenues for further research, such as exploring the use of other depth sensors or developing more robust techniques for handling variations in the quality and coverage of historical sensor data.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers

Sparse Points to Dense Clouds: Enhancing 3D Detection with Limited LiDAR Data
Aakash Kumar, Chen Chen, Ajmal Mian, Neils Lobo, Mubarak Shah
0
0
3D detection is a critical task that enables machines to identify and locate objects in three-dimensional space. It has a broad range of applications in several fields, including autonomous driving, robotics and augmented reality. Monocular 3D detection is attractive as it requires only a single camera, however, it lacks the accuracy and robustness required for real world applications. High resolution LiDAR on the other hand, can be expensive and lead to interference problems in heavy traffic given their active transmissions. We propose a balanced approach that combines the advantages of monocular and point cloud-based 3D detection. Our method requires only a small number of 3D points, that can be obtained from a low-cost, low-resolution sensor. Specifically, we use only 512 points, which is just 1% of a full LiDAR frame in the KITTI dataset. Our method reconstructs a complete 3D point cloud from this limited 3D information combined with a single image. The reconstructed 3D point cloud and corresponding image can be used by any multi-modal off-the-shelf detector for 3D object detection. By using the proposed network architecture with an off-the-shelf multi-modal 3D detector, the accuracy of 3D detection improves by 20% compared to the state-of-the-art monocular detection methods and 6% to 9% compare to the baseline multi-modal methods on KITTI and JackRabbot datasets.
4/11/2024

Monocular 3D lane detection for Autonomous Driving: Recent Achievements, Challenges, and Outlooks
Fulong Ma, Weiqing Qi, Guoyang Zhao, Linwei Zheng, Sheng Wang, Yuxuan Liu, Ming Liu
0
0
3D lane detection is essential in autonomous driving as it extracts structural and traffic information from the road in three-dimensional space, aiding self-driving cars in logical, safe, and comfortable path planning and motion control. Given the cost of sensors and the advantages of visual data in color information, 3D lane detection based on monocular vision is an important research direction in the realm of autonomous driving, increasingly gaining attention in both industry and academia. Regrettably, recent advancements in visual perception seem inadequate for the development of fully reliable 3D lane detection algorithms, which also hampers the progress of vision-based fully autonomous vehicles. We believe that there is still considerable room for improvement in 3D lane detection algorithms for autonomous vehicles using visual sensors, and significant enhancements are needed. This review looks back and analyzes the current state of achievements in the field of 3D lane detection research. It covers all current monocular-based 3D lane detection processes, discusses the performance of these cutting-edge algorithms, analyzes the time complexity of various algorithms, and highlights the main achievements and limitations of ongoing research efforts. The survey also includes a comprehensive discussion of available 3D lane detection datasets and the challenges that researchers face but have not yet resolved. Finally, our work outlines future research directions and invites researchers and practitioners to join this exciting field.
4/22/2024

Lift-Attend-Splat: Bird's-eye-view camera-lidar fusion using transformers
James Gunn, Zygmunt Lenyk, Anuj Sharma, Andrea Donati, Alexandru Buburuzan, John Redford, Romain Mueller
0
0
Combining complementary sensor modalities is crucial to providing robust perception for safety-critical robotics applications such as autonomous driving (AD). Recent state-of-the-art camera-lidar fusion methods for AD rely on monocular depth estimation which is a notoriously difficult task compared to using depth information from the lidar directly. Here, we find that this approach does not leverage depth as expected and show that naively improving depth estimation does not lead to improvements in object detection performance. Strikingly, we also find that removing depth estimation altogether does not degrade object detection performance substantially, suggesting that relying on monocular depth could be an unnecessary architectural bottleneck during camera-lidar fusion. In this work, we introduce a novel fusion method that bypasses monocular depth estimation altogether and instead selects and fuses camera and lidar features in a bird's-eye-view grid using a simple attention mechanism. We show that our model can modulate its use of camera features based on the availability of lidar features and that it yields better 3D object detection on the nuScenes dataset than baselines relying on monocular depth estimation.
5/22/2024

Multi-Object Tracking with Camera-LiDAR Fusion for Autonomous Driving
Riccardo Pieroni, Simone Specchia, Matteo Corno, Sergio Matteo Savaresi
0
0
This paper presents a novel multi-modal Multi-Object Tracking (MOT) algorithm for self-driving cars that combines camera and LiDAR data. Camera frames are processed with a state-of-the-art 3D object detector, whereas classical clustering techniques are used to process LiDAR observations. The proposed MOT algorithm comprises a three-step association process, an Extended Kalman filter for estimating the motion of each detected dynamic obstacle, and a track management phase. The EKF motion model requires the current measured relative position and orientation of the observed object and the longitudinal and angular velocities of the ego vehicle as inputs. Unlike most state-of-the-art multi-modal MOT approaches, the proposed algorithm does not rely on maps or knowledge of the ego global pose. Moreover, it uses a 3D detector exclusively for cameras and is agnostic to the type of LiDAR sensor used. The algorithm is validated both in simulation and with real-world data, with satisfactory results.
5/14/2024