Long-Term Human Trajectory Prediction using 3D Dynamic Scene Graphs

0

Sign in to get full access
Overview
- This paper presents a novel approach to long-term human trajectory prediction using 3D dynamic scene graphs.
- It introduces a framework that combines 3D scene understanding, human-object interactions, and social dynamics to generate long-term human motion forecasts.
- The proposed method outperforms state-of-the-art approaches on several benchmark datasets, demonstrating its effectiveness in real-world applications.
Plain English Explanation
The paper describes a new way to predict the future paths that people will take, using a technique called 3D dynamic scene graphs. This involves building a detailed 3D model of the environment, understanding how people interact with objects in that environment, and considering the social dynamics between people.
By combining these elements, the researchers were able to create a system that can accurately forecast where people will move over longer time periods, outperforming previous methods. This could be useful for applications like <a href="https://aimodels.fyi/papers/arxiv/multi-agent-long-term-3d-human-pose">autonomous vehicles</a>, <a href="https://aimodels.fyi/papers/arxiv/modeling-social-interaction-dynamics-using-temporal-graph">surveillance systems</a>, and <a href="https://aimodels.fyi/papers/arxiv/tract-training-dynamics-aware-contrastive-learning-framework">robot navigation</a>, where predicting human behavior is crucial.
Technical Explanation
The core of the proposed approach is the <a href="https://aimodels.fyi/papers/arxiv/amend-mixture-experts-framework-long-tailed-trajectory">3D dynamic scene graph</a>, which represents the environment, objects, and people in a structured way. This graph is used to model the complex interactions between humans and their surroundings, as well as the social dynamics between individuals.
The system takes in sensor data from the environment, such as camera images and depth information, and uses deep learning models to extract relevant features and construct the 3D scene graph. This graph is then used to predict the future trajectories of people in the scene over an extended time horizon, accounting for factors like <a href="https://aimodels.fyi/papers/arxiv/learning-distributions-over-trajectories-human-behavior-prediction">human behavior patterns</a> and the constraints of the physical environment.
The authors evaluate their approach on several benchmark datasets and demonstrate significant improvements over existing state-of-the-art methods for long-term human trajectory prediction.
Critical Analysis
The paper provides a thorough and well-designed study, with a clear focus on addressing the challenge of long-term human motion forecasting. The authors acknowledge the limitations of their approach, such as the potential for error propagation over long prediction horizons and the need for further research on generalizing the method to diverse environments.
One potential concern is the reliance on detailed 3D scene information, which may not always be available in practical scenarios. Additionally, the model's performance on handling rare or unexpected events, such as sudden changes in human behavior or unexpected object interactions, could be an area for further investigation.
Overall, the research presents a promising direction for integrating scene understanding, human-object interactions, and social dynamics to improve long-term human trajectory prediction. Continued advancements in this field could have significant implications for a wide range of applications, from autonomous systems to smart city planning.
Conclusion
This paper introduces a novel approach to long-term human trajectory prediction that leverages 3D dynamic scene graphs to model the complex interactions between people, objects, and their environment. The proposed framework outperforms state-of-the-art methods, demonstrating the value of integrating scene understanding, human-object interactions, and social dynamics for accurate motion forecasting.
The research has the potential to significantly impact various applications, such as autonomous navigation, surveillance, and human-robot interaction, where predicting human behavior over extended time periods is crucial. While the approach has some limitations, the work represents an important step forward in the field of long-term human trajectory prediction and highlights the benefits of a holistic, scene-centric approach to this challenging problem.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Long-Term Human Trajectory Prediction using 3D Dynamic Scene Graphs
Nicolas Gorlo, Lukas Schmid, Luca Carlone
We present a novel approach for long-term human trajectory prediction, which is essential for long-horizon robot planning in human-populated environments. State-of-the-art human trajectory prediction methods are limited by their focus on collision avoidance and short-term planning, and their inability to model complex interactions of humans with the environment. In contrast, our approach overcomes these limitations by predicting sequences of human interactions with the environment and using this information to guide trajectory predictions over a horizon of up to 60s. We leverage Large Language Models (LLMs) to predict interactions with the environment by conditioning the LLM prediction on rich contextual information about the scene. This information is given as a 3D Dynamic Scene Graph that encodes the geometry, semantics, and traversability of the environment into a hierarchical representation. We then ground these interaction sequences into multi-modal spatio-temporal distributions over human positions using a probabilistic approach based on continuous-time Markov Chains. To evaluate our approach, we introduce a new semi-synthetic dataset of long-term human trajectories in complex indoor environments, which also includes annotations of human-object interactions. We show in thorough experimental evaluations that our approach achieves a 54% lower average negative log-likelihood (NLL) and a 26.5% lower Best-of-20 displacement error compared to the best non-privileged baselines for a time horizon of 60s.
Read more5/2/2024
🤿
0
FutureHuman3D: Forecasting Complex Long-Term 3D Human Behavior from Video Observations
Christian Diller, Thomas Funkhouser, Angela Dai
We present a generative approach to forecast long-term future human behavior in 3D, requiring only weak supervision from readily available 2D human action data. This is a fundamental task enabling many downstream applications. The required ground-truth data is hard to capture in 3D (mocap suits, expensive setups) but easy to acquire in 2D (simple RGB cameras). Thus, we design our method to only require 2D RGB data at inference time while being able to generate 3D human motion sequences. We use a differentiable 2D projection scheme in an autoregressive manner for weak supervision, and an adversarial loss for 3D regularization. Our method predicts long and complex human behavior sequences (e.g., cooking, assembly) consisting of multiple sub-actions. We tackle this in a semantically hierarchical manner, jointly predicting high-level coarse action labels together with their low-level fine-grained realizations as characteristic 3D human poses. We observe that these two action representations are coupled in nature, and joint prediction benefits both action and pose forecasting. Our experiments demonstrate the complementary nature of joint action and 3D pose prediction: our joint approach outperforms each task treated individually, enables robust longer-term sequence prediction, and improves over alternative approaches to forecast actions and characteristic 3D poses.
Read more5/20/2024
0
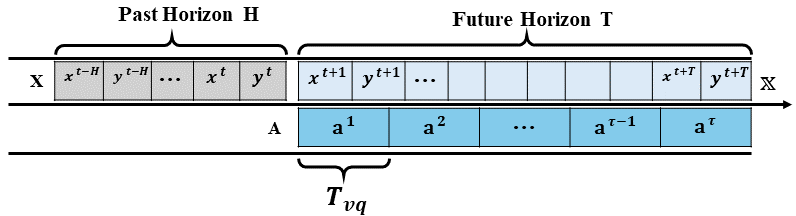
Predicting Long-Term Human Behaviors in Discrete Representations via Physics-Guided Diffusion
Zhitian Zhang, Anjian Li, Angelica Lim, Mo Chen
Long-term human trajectory prediction is a challenging yet critical task in robotics and autonomous systems. Prior work that studied how to predict accurate short-term human trajectories with only unimodal features often failed in long-term prediction. Reinforcement learning provides a good solution for learning human long-term behaviors but can suffer from challenges in data efficiency and optimization. In this work, we propose a long-term human trajectory forecasting framework that leverages a guided diffusion model to generate diverse long-term human behaviors in a high-level latent action space, obtained via a hierarchical action quantization scheme using a VQ-VAE to discretize continuous trajectories and the available context. The latent actions are predicted by our guided diffusion model, which uses physics-inspired guidance at test time to constrain generated multimodal action distributions. Specifically, we use reachability analysis during the reverse denoising process to guide the diffusion steps toward physically feasible latent actions. We evaluate our framework on two publicly available human trajectory forecasting datasets: SFU-Store-Nav and JRDB, and extensive experimental results show that our framework achieves superior performance in long-term human trajectory forecasting.
Read more5/31/2024

0
Multi-agent Long-term 3D Human Pose Forecasting via Interaction-aware Trajectory Conditioning
Jaewoo Jeong, Daehee Park, Kuk-Jin Yoon
Human pose forecasting garners attention for its diverse applications. However, challenges in modeling the multi-modal nature of human motion and intricate interactions among agents persist, particularly with longer timescales and more agents. In this paper, we propose an interaction-aware trajectory-conditioned long-term multi-agent human pose forecasting model, utilizing a coarse-to-fine prediction approach: multi-modal global trajectories are initially forecasted, followed by respective local pose forecasts conditioned on each mode. In doing so, our Trajectory2Pose model introduces a graph-based agent-wise interaction module for a reciprocal forecast of local motion-conditioned global trajectory and trajectory-conditioned local pose. Our model effectively handles the multi-modality of human motion and the complexity of long-term multi-agent interactions, improving performance in complex environments. Furthermore, we address the lack of long-term (6s+) multi-agent (5+) datasets by constructing a new dataset from real-world images and 2D annotations, enabling a comprehensive evaluation of our proposed model. State-of-the-art prediction performance on both complex and simpler datasets confirms the generalized effectiveness of our method. The code is available at https://github.com/Jaewoo97/T2P.
Read more4/9/2024