Long-time Self-body Image Acquisition and its Application to the Control of Musculoskeletal Structures

0

Sign in to get full access
Overview
- This paper presents a long-term self-body image acquisition system and its application to controlling musculoskeletal structures.
- The system enables a robot to continuously update its internal representation of its body by observing itself over an extended period.
- This allows the robot to adapt its control strategies as its body changes over time, such as through wear and tear or modifications.
- The approach is demonstrated on a musculoskeletal humanoid robot.
Plain English Explanation
The paper describes a way for robots to build and update their understanding of their own bodies over long periods of time. This is important because a robot's body can change over time, for example through wear and tear or modifications. By continuously observing itself, the robot can update its internal model of its body and adjust how it controls its movements accordingly.
The key idea is that the robot can use cameras and sensors to observe its own body and limbs in action. Over time, as the robot moves around and interacts with its environment, it can gradually build up a detailed picture of its physical structure and capabilities. This allows the robot to adapt its control strategies as its body changes, helping it to maintain smooth and efficient movement.
The researchers demonstrate this approach on a musculoskeletal humanoid robot, which has a body designed to mimic human-like musculature and joints. By continuously updating its self-model, the robot is able to effectively control its complex musculoskeletal structure and adapt to changes over time.
Technical Explanation
The paper presents a system for online self-body image acquisition and its application to controlling a musculoskeletal humanoid robot. The key components of the system include:
-
Self-Observation: The robot is equipped with cameras and proprioceptive sensors that allow it to continuously observe its own body movements and configuration over extended periods of time.
-
Self-Modeling: The sensor data is used to build and update an internal 3D model of the robot's body structure and joint/muscle relationships. This self-model is continuously refined as new observations are made.
-
Adaptive Control: The self-model is used to inform the robot's control strategies, allowing it to adapt its movements to changes in its physical structure over time, such as wear and tear or modifications.
The approach is demonstrated on a musculoskeletal humanoid robot, where the self-modeling and adaptive control enable the robot to effectively control its complex biomimetic structure and maintain stable and robust performance as its body changes over extended periods of use.
Critical Analysis
The paper presents a promising approach for enabling robots to maintain effective control of their bodies over long-term use. However, the authors acknowledge several limitations and areas for further research:
-
The self-modeling process relies on accurate sensor data, which may be challenging to obtain in noisy real-world environments. Robust sensing and data processing techniques will be crucial.
-
The adaptability of the control strategies is limited by the accuracy and completeness of the self-model. Improving the self-modeling process to capture more nuanced and dynamic aspects of the robot's body will be important.
-
The experiments were conducted on a single musculoskeletal robot platform. Demonstrating the generalizability of the approach to a wider range of robotic systems and morphologies would further validate the technique.
Overall, the paper presents an interesting and potentially impactful contribution to the field of robot self-awareness and adaptive control. With further development and validation, the long-term self-body image acquisition approach could enable more robust and resilient robotic systems capable of maintaining effective performance over extended periods of use.
Conclusion
This paper introduces a system for enabling robots to continuously build and update their internal representation of their own bodies through long-term self-observation. By adapting their control strategies based on this self-model, the robots are able to maintain stable and effective performance as their physical structures change over time.
The demonstrated approach on a musculoskeletal humanoid robot highlights the potential of this technique to unlock new capabilities in biomimetic robotic systems that can adapt and evolve alongside their changing bodies. With further development, this self-modeling and adaptive control framework could have significant implications for the resilience and longevity of a wide range of robotic applications.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Long-time Self-body Image Acquisition and its Application to the Control of Musculoskeletal Structures
Kento Kawaharazuka, Kei Tsuzuki, Shogo Makino, Moritaka Onitsuka, Yuki Asano, Kei Okada, Koji Kawasaki, Masayuki Inaba
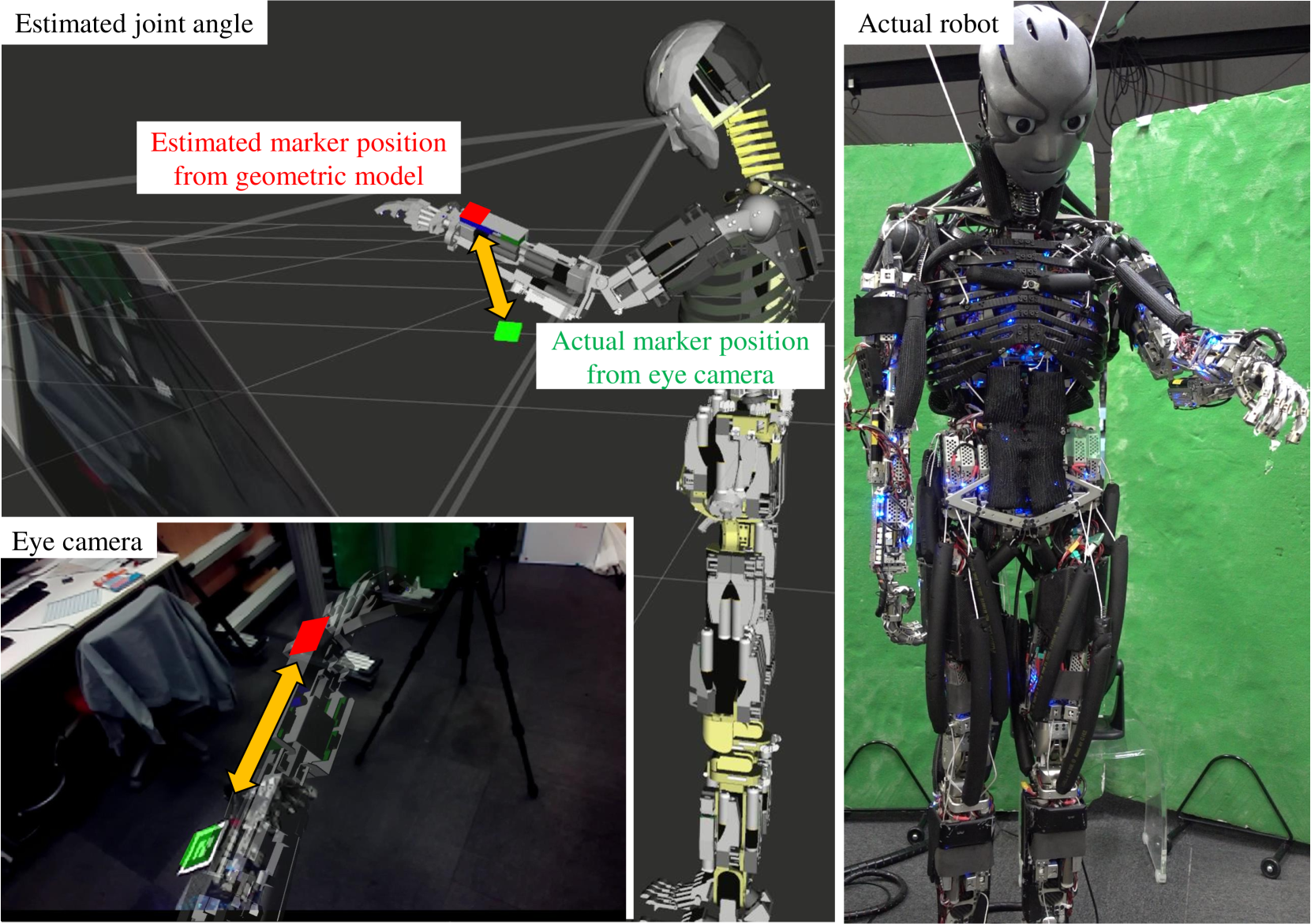
The tendon-driven musculoskeletal humanoid has many benefits that human beings have, but the modeling of its complex muscle and bone structures is difficult and conventional model-based controls cannot realize intended movements. Therefore, a learning control mechanism that acquires nonlinear relationships between joint angles, muscle tensions, and muscle lengths from the actual robot is necessary. In this study, we propose a system which runs the learning control mechanism for a long time to keep the self-body image of the musculoskeletal humanoid correct at all times. Also, we show that the musculoskeletal humanoid can conduct position control, torque control, and variable stiffness control using this self-body image. We conduct a long-time self-body image acquisition experiment lasting 3 hours, evaluate variable stiffness control using the self-body image, etc., and discuss the superiority and practicality of the self-body image acquisition of musculoskeletal structures, comprehensively.
Read more4/9/2024

0
Online Self-body Image Acquisition Considering Changes in Muscle Routes Caused by Softness of Body Tissue for Tendon-driven Musculoskeletal Humanoids
Kento Kawaharazuka, Shogo Makino, Masaya Kawamura, Ayaka Fujii, Yuki Asano, Kei Okada, Masayuki Inaba
Tendon-driven musculoskeletal humanoids have many benefits in terms of the flexible spine, multiple degrees of freedom, and variable stiffness. At the same time, because of its body complexity, there are problems in controllability. First, due to the large difference between the actual robot and its geometric model, it cannot move as intended and large internal muscle tension may emerge. Second, movements which do not appear as changes in muscle lengths may emerge, because of the muscle route changes caused by softness of body tissue. To solve these problems, we construct two models: ideal joint-muscle model and muscle-route change model, using a neural network. We initialize these models by a man-made geometric model and update them online using the sensor information of the actual robot. We validate that the tendon-driven musculoskeletal humanoid Kengoro is able to obtain a correct self-body image through several experiments.
Read more4/9/2024
0
Online Learning of Joint-Muscle Mapping Using Vision in Tendon-driven Musculoskeletal Humanoids
Kento Kawaharazuka, Shogo Makino, Masaya Kawamura, Yuki Asano, Kei Okada, Masayuki Inaba
The body structures of tendon-driven musculoskeletal humanoids are complex, and accurate modeling is difficult, because they are made by imitating the body structures of human beings. For this reason, we have not been able to move them accurately like ordinary humanoids driven by actuators in each axis, and large internal muscle tension and slack of tendon wires have emerged by the model error between its geometric model and the actual robot. Therefore, we construct a joint-muscle mapping (JMM) using a neural network (NN), which expresses a nonlinear relationship between joint angles and muscle lengths, and aim to move tendon-driven musculoskeletal humanoids accurately by updating the JMM online from data of the actual robot. In this study, the JMM is updated online by using the vision of the robot so that it moves to the correct position (Vision Updater). Also, we execute another update to modify muscle antagonisms correctly (Antagonism Updater). By using these two updaters, the error between the target and actual joint angles decrease to about 40% in 5 minutes, and we show through a manipulation experiment that the tendon-driven musculoskeletal humanoid Kengoro becomes able to move as intended. This novel system can adapt to the state change and growth of robots, because it updates the JMM online successively.
Read more4/9/2024

0
Self Model for Embodied Intelligence: Modeling Full-Body Human Musculoskeletal System and Locomotion Control with Hierarchical Low-Dimensional Representation
Chenhui Zuo, Kaibo He, Jing Shao, Yanan Sui
Modeling and control of the human musculoskeletal system is important for understanding human motor functions, developing embodied intelligence, and optimizing human-robot interaction systems. However, current human musculoskeletal models are restricted to a limited range of body parts and often with a reduced number of muscles. There is also a lack of algorithms capable of controlling over 600 muscles to generate reasonable human movements. To fill this gap, we build a musculoskeletal model (MS-Human-700) with 90 body segments, 206 joints, and 700 muscle-tendon units, allowing simulation of full-body dynamics and interaction with various devices. We develop a new algorithm using low-dimensional representation and hierarchical deep reinforcement learning to achieve state-of-the-art full-body control. We validate the effectiveness of our model and algorithm in simulations with real human locomotion data. The musculoskeletal model, along with its control algorithm, will be made available to the research community to promote a deeper understanding of human motion control and better design of interactive robots. Project page: https://lnsgroup.cc/research/MS-Human-700
Read more5/28/2024