Online Learning of Joint-Muscle Mapping Using Vision in Tendon-driven Musculoskeletal Humanoids

0
Sign in to get full access
Overview
- This paper presents a method for online learning of the joint-muscle mapping in tendon-driven musculoskeletal humanoid robots using vision.
- The approach aims to enable humanoid robots to autonomously acquire an accurate body image and kinematic model, which is essential for tasks like grasping and manipulation.
- The authors demonstrate their method on a simulated humanoid robot, showing that it can adapt to changes in the robot's musculoskeletal structure over time.
Plain English Explanation
Humanoid robots are designed to mimic the movements and capabilities of the human body. To perform tasks like grasping and manipulation, these robots need an accurate understanding of their own physical structure and how their joints and muscles work together. Online Self-Body Image Acquisition Considering Changes and Long-Time Self-Body Image Acquisition and Its have explored related approaches for this problem.
In this paper, the researchers present a method that allows a humanoid robot to continuously learn and update its understanding of how its joints and muscles are connected and move together. The key idea is to use vision - by observing its own body movements, the robot can figure out how its different parts are related.
The researchers demonstrate their approach on a simulated humanoid robot, showing that it can adapt to changes in the robot's physical structure over time. This is an important capability, as the robot's body may change due to wear and tear or even intentional modifications. Accounting for Hysteresis in Forward Kinematics of Nonlinearly Routed Tendon-driven Continuum Robots and Modeling Kinematic Uncertainty in Tendon-Driven Continuum Robots have also explored related challenges in modeling the kinematics of tendon-driven robots.
By enabling humanoid robots to continuously learn and update their understanding of their own bodies, this approach can help improve their ability to interact with and manipulate the world around them, which has important implications for Leveraging Digital Perceptual Technologies for Remote Perception and Analysis.
Technical Explanation
The paper presents a method for online learning of the joint-muscle mapping in tendon-driven musculoskeletal humanoid robots using vision. The key idea is to train a neural network to learn the mapping between the robot's joint angles and the corresponding muscle activations, using visual observations of the robot's own body movements.
The authors first collect training data by having the robot perform a series of random movements while recording the joint angles and corresponding muscle activations. They then train a neural network to learn this mapping, using the collected data.
During deployment, the robot can use this trained network to estimate the muscle activations needed to achieve a desired joint configuration. Crucially, the network can be continuously updated as the robot's physical structure changes over time, allowing it to maintain an accurate body image.
The authors demonstrate their approach on a simulated humanoid robot with a musculoskeletal structure inspired by the human body. They show that the robot can adapt to changes in its physical structure, such as the breakage of a tendon, and continue to perform tasks like grasping and manipulation effectively.
Critical Analysis
The paper presents a promising approach for enabling humanoid robots to autonomously acquire an accurate body image and kinematic model, which is a crucial capability for tasks like grasping and manipulation. The use of vision to learn the joint-muscle mapping is an interesting and innovative idea, as it allows the robot to continuously update its understanding of its own body without relying on explicit kinematic models.
However, the paper does not address some potential limitations of the approach. For example, the authors do not discuss how the method would perform in the face of more significant changes to the robot's physical structure, such as the loss or replacement of entire limbs. Additionally, the performance of the method may be sensitive to factors like the quality and resolution of the robot's visual sensors, which are not explored in depth.
Furthermore, the authors do not provide a detailed analysis of the computational and memory requirements of their approach, which could be an important consideration for real-world deployment on resource-constrained robotic platforms.
Despite these caveats, the core idea presented in the paper is a valuable contribution to the field of humanoid robotics, and the authors' demonstration of the method's ability to adapt to changes in the robot's physical structure is a compelling proof of concept. Future research could explore ways to address the limitations and further enhance the robustness and efficiency of the approach.
Conclusion
This paper presents a novel method for enabling humanoid robots to autonomously acquire and maintain an accurate body image and kinematic model using vision-based online learning of the joint-muscle mapping. By allowing the robot to continuously update its understanding of its own physical structure, the approach can help improve the robot's ability to interact with and manipulate the world around it, with important implications for a wide range of robotic applications.
While the paper identifies some potential limitations of the approach, the core idea and the authors' demonstration of its adaptability to changes in the robot's physical structure are valuable contributions to the field of humanoid robotics. Future research in this area could further enhance the robustness and efficiency of the method, paving the way for more capable and adaptable humanoid robots.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Online Learning of Joint-Muscle Mapping Using Vision in Tendon-driven Musculoskeletal Humanoids
Kento Kawaharazuka, Shogo Makino, Masaya Kawamura, Yuki Asano, Kei Okada, Masayuki Inaba
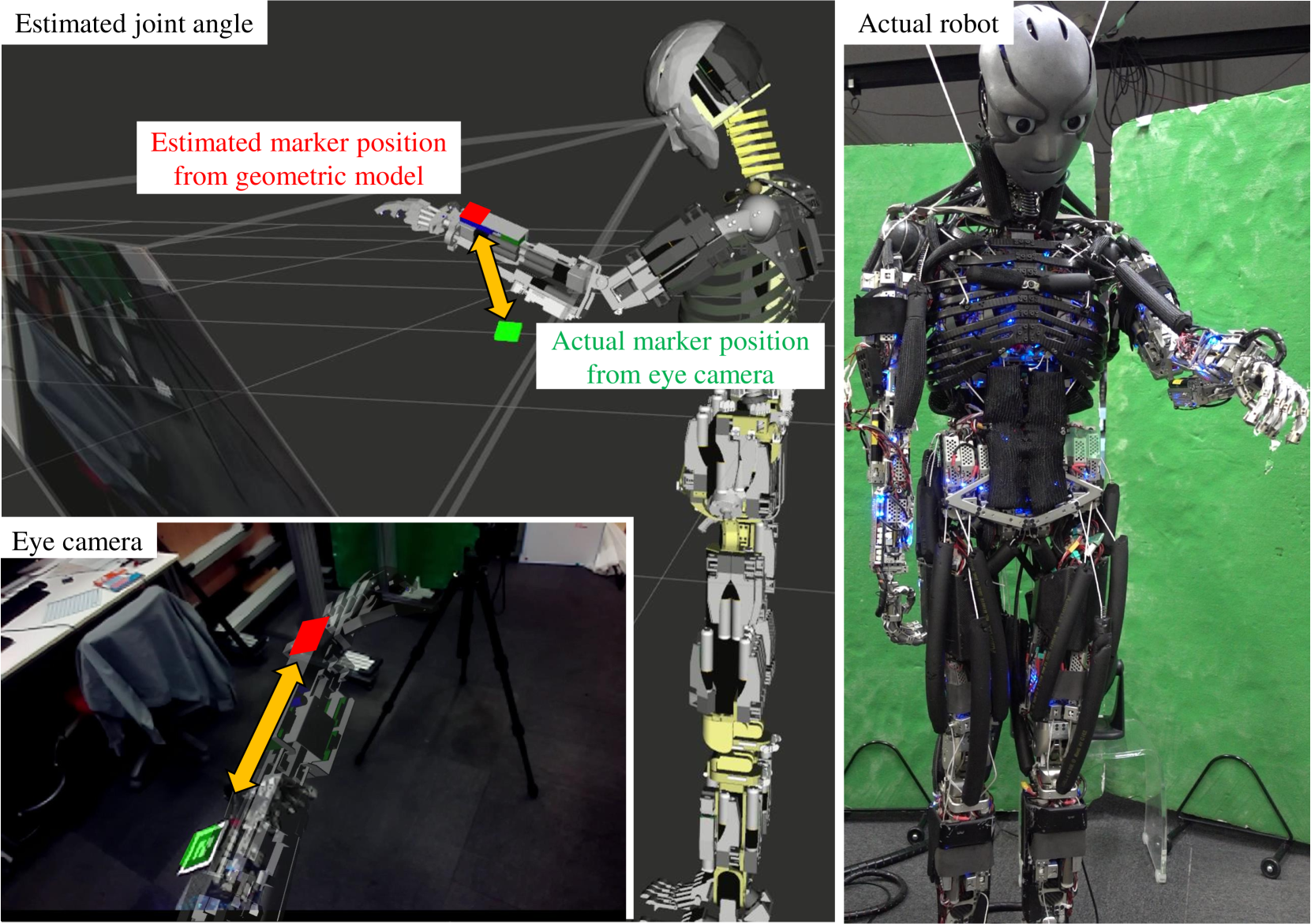
The body structures of tendon-driven musculoskeletal humanoids are complex, and accurate modeling is difficult, because they are made by imitating the body structures of human beings. For this reason, we have not been able to move them accurately like ordinary humanoids driven by actuators in each axis, and large internal muscle tension and slack of tendon wires have emerged by the model error between its geometric model and the actual robot. Therefore, we construct a joint-muscle mapping (JMM) using a neural network (NN), which expresses a nonlinear relationship between joint angles and muscle lengths, and aim to move tendon-driven musculoskeletal humanoids accurately by updating the JMM online from data of the actual robot. In this study, the JMM is updated online by using the vision of the robot so that it moves to the correct position (Vision Updater). Also, we execute another update to modify muscle antagonisms correctly (Antagonism Updater). By using these two updaters, the error between the target and actual joint angles decrease to about 40% in 5 minutes, and we show through a manipulation experiment that the tendon-driven musculoskeletal humanoid Kengoro becomes able to move as intended. This novel system can adapt to the state change and growth of robots, because it updates the JMM online successively.
Read more4/9/2024

0
Online Self-body Image Acquisition Considering Changes in Muscle Routes Caused by Softness of Body Tissue for Tendon-driven Musculoskeletal Humanoids
Kento Kawaharazuka, Shogo Makino, Masaya Kawamura, Ayaka Fujii, Yuki Asano, Kei Okada, Masayuki Inaba
Tendon-driven musculoskeletal humanoids have many benefits in terms of the flexible spine, multiple degrees of freedom, and variable stiffness. At the same time, because of its body complexity, there are problems in controllability. First, due to the large difference between the actual robot and its geometric model, it cannot move as intended and large internal muscle tension may emerge. Second, movements which do not appear as changes in muscle lengths may emerge, because of the muscle route changes caused by softness of body tissue. To solve these problems, we construct two models: ideal joint-muscle model and muscle-route change model, using a neural network. We initialize these models by a man-made geometric model and update them online using the sensor information of the actual robot. We validate that the tendon-driven musculoskeletal humanoid Kengoro is able to obtain a correct self-body image through several experiments.
Read more4/9/2024

0
A Method of Joint Angle Estimation Using Only Relative Changes in Muscle Lengths for Tendon-driven Humanoids with Complex Musculoskeletal Structures
Kento Kawaharazuka, Shogo Makino, Masaya Kawamura, Yuki Asano, Kei Okada, Masayuki Inaba
Tendon-driven musculoskeletal humanoids typically have complex structures similar to those of human beings, such as ball joints and the scapula, in which encoders cannot be installed. Therefore, joint angles cannot be directly obtained and need to be estimated using the changes in muscle lengths. In previous studies, methods using table-search and extended kalman filter have been developed. These methods express the joint-muscle mapping, which is the nonlinear relationship between joint angles and muscle lengths, by using a data table, polynomials, or a neural network. However, due to computational complexity, these methods cannot consider the effects of polyarticular muscles. In this study, considering the limitation of the computational cost, we reduce unnecessary degrees of freedom, divide joints and muscles into several groups, and formulate a joint angle estimation method that takes into account polyarticular muscles. Also, we extend the estimation method to propose a joint angle estimation method using only the relative changes in muscle lengths. By this extension, which does not use absolute muscle lengths, we do not need to execute a difficult calibration of muscle lengths for tendon-driven musculoskeletal humanoids. Finally, we conduct experiments in simulation and actual environments, and verify the effectiveness of this study.
Read more4/23/2024

0
Long-time Self-body Image Acquisition and its Application to the Control of Musculoskeletal Structures
Kento Kawaharazuka, Kei Tsuzuki, Shogo Makino, Moritaka Onitsuka, Yuki Asano, Kei Okada, Koji Kawasaki, Masayuki Inaba
The tendon-driven musculoskeletal humanoid has many benefits that human beings have, but the modeling of its complex muscle and bone structures is difficult and conventional model-based controls cannot realize intended movements. Therefore, a learning control mechanism that acquires nonlinear relationships between joint angles, muscle tensions, and muscle lengths from the actual robot is necessary. In this study, we propose a system which runs the learning control mechanism for a long time to keep the self-body image of the musculoskeletal humanoid correct at all times. Also, we show that the musculoskeletal humanoid can conduct position control, torque control, and variable stiffness control using this self-body image. We conduct a long-time self-body image acquisition experiment lasting 3 hours, evaluate variable stiffness control using the self-body image, etc., and discuss the superiority and practicality of the self-body image acquisition of musculoskeletal structures, comprehensively.
Read more4/9/2024