Low-cost adaptive obstacle avoidance trajectory control for express delivery drone
2403.19956
0
0

Abstract
This paper studies quadcopters obstacle avoidance trajectory control (OATC) problem for express delivery. A new nonlinear adaptive learning controller that is low-cost and portable to different wheelbase sizes is proposed to adapt to large-angle maneuvers and load changes in UAV delivery missions. The controller consists of a nonlinear variable gain (NLVG) function and an extreme value search (ES) algorithm to reduce overshoot and settling time. Finally, simulations were conducted on a quadcopter to verify the effectiveness of the proposed control scheme under two typical collision-free trajectories.
Create account to get full access
Introduction
The paper discusses the obstacle avoidance trajectory control (OATC) problem for uncrewed aerial vehicles (UAVs), which is important for applications like exploration, swarm flight, and coronavirus prevention. Since drones are not limited by infrastructure, they can lower costs and delivery times. However, varied quadcopter parameters make controller transplant difficult. This paper proposes a NLVG-PID controller that can reduce overshoot in fixed-gain PID controllers. The key contributions are:
-
Analysis of the fixed-gain PID controller structure and quadcopter dynamics/kinematics models.
-
Design of a NLVG-PID controller for a delivery quadcopter, using extremum seeking to learn optimal nonlinear PID parameters. This is the first NLVG-PID obstacle avoidance controller for delivery drones.
-
Simulation verification of the proposed control scheme on a quadcopter under two collision-free trajectories.
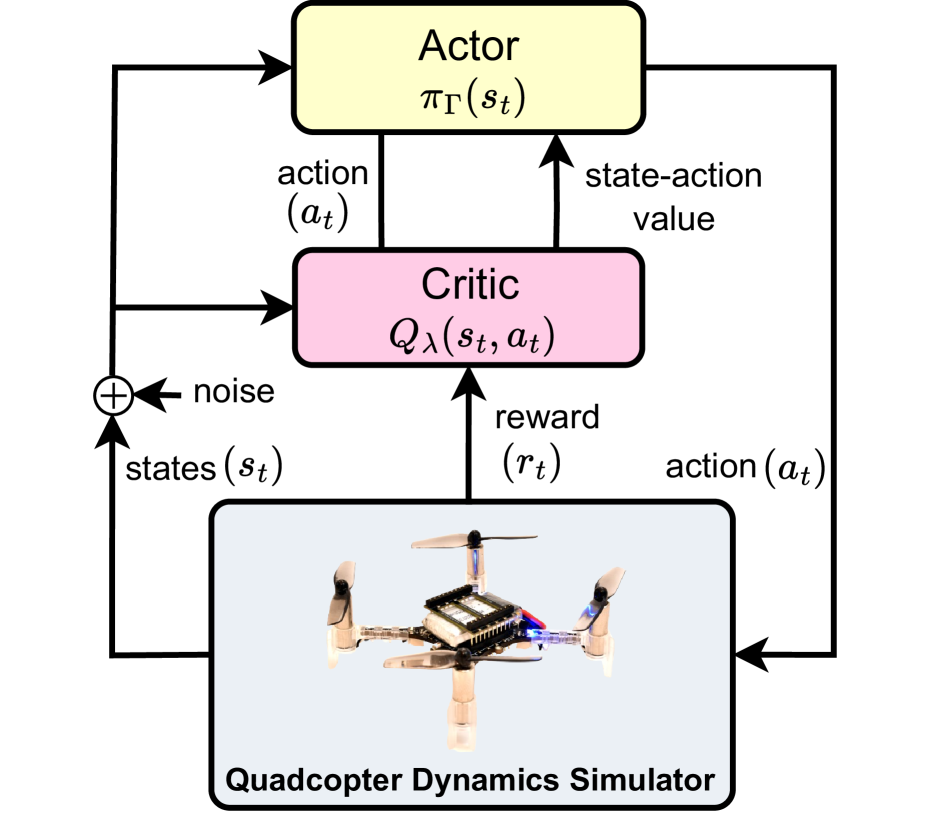
The paper also describes the quadcopter control system scheme in Fig. 1.
The paper describes the key sections as follows:
Section 2 details the mathematical model of the quadcopter's dynamics, kinematics, and obstacle detection pipeline.
Section 3 develops the NLVG-PID control framework and an Evolutionary Strategies method for optimal parameter tuning. It also provides a stability analysis of the closed-loop system.
Section 4 verifies the quadcopter's NLVG-PID controller through testing in various flight scenarios, including four-side route, 8-character route, and scenic spiral position tracking.
Section 5 concludes the work.
Problem formulation
The paper assumes the structure of the express delivery drone is known, but the specific load weight and precise drone model are unknown. Obstacle avoidance is performed in three-dimensional space. First, the threat area is circled in the top view, as shown in Fig.2. The drone then avoids obstacles and chooses to fly upward or downward based on the Euclidean distance cost.

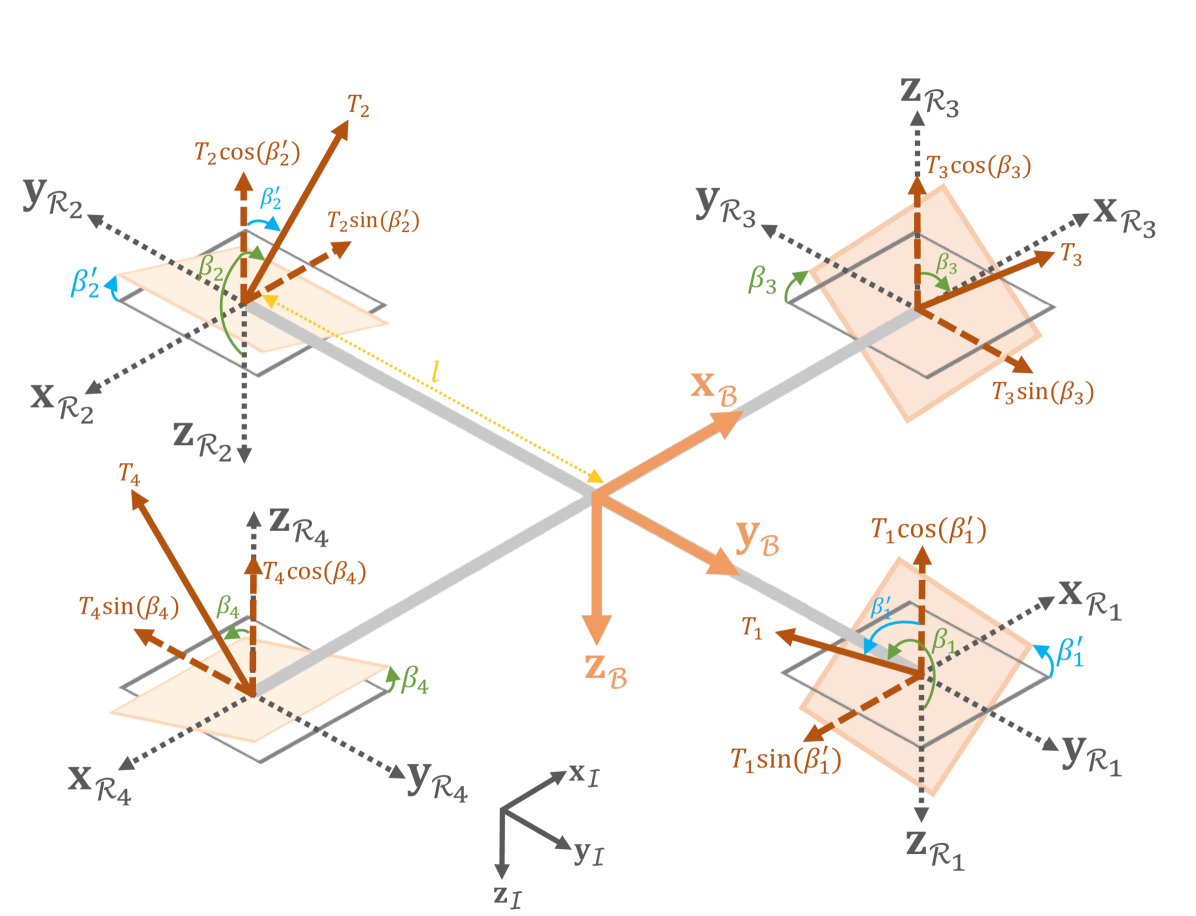
The text describes a coordinate system used to analyze the rotation and translation of a UAV. The body-fixed coordinate system (B-frame) is represented as B=(XB,YB,ZB), and the earth inertial frame (E-frame) is represented as E=(XE,YE,ZE). The velocity of the quadcopter in the E-frame is represented as VE=(vex,vey,vez). The schematic diagram of the quadcopter control system, as shown in Fig. 1, includes the components described in the text.
Controller design
The text provides a detailed explanation of a nonlinear variable gain PID (NLVG-PID) controller for quadcopter control. The key points are:
-
The standard PID controller is defined, with proportional, integral, and derivative terms. This is then extended to a nonlinear formulation, where the gains are varied based on the size of the error.
-
Smaller errors use lower gain values, while larger errors use higher gain values. This helps improve the controller's fast response capability for different error magnitudes.
-
The nonlinear gain functions are defined mathematically, with different thresholds and gain values for the P, I, and D terms.
-
An extremum-seeking (ES) optimization approach is used to automatically tune the PID gain parameters online. This iteratively updates the gains to minimize a cost function related to tracking error.
-
The paper also discusses planning obstacle avoidance trajectories for the quadcopter using sensor information and geometric constraints. This ensures safe, collision-free flight.
Overall, the NLVG-PID controller with ES tuning and obstacle avoidance strategy provides an advanced control framework for improved quadcopter performance and safety.
Simulation and results
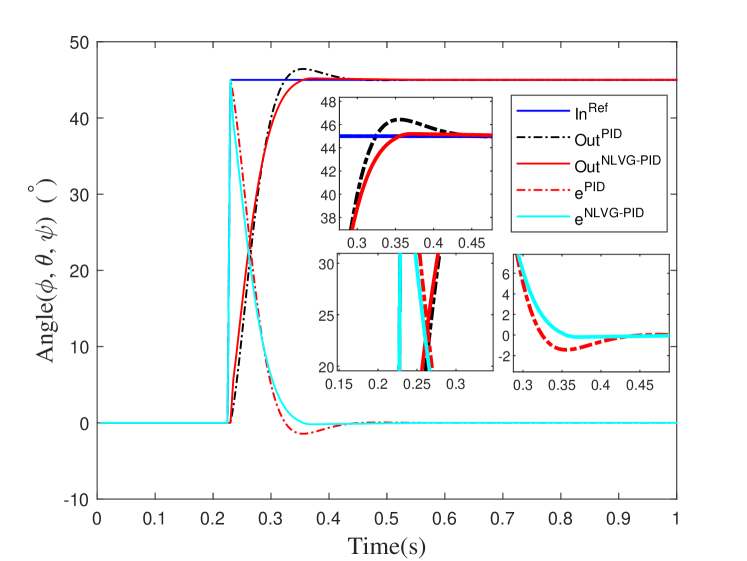
The paper describes a simulation experiment conducted to verify the efficiency of the NLVG-PID controller. The experiment focused on the internal loop angle control of a quadcopter.
The test compared the performance of a standard PID controller against the NLVG-PID controller, which uses three cost functions: IAE (integrated absolute error), ITAE (integration time and absolute error), and ITSE (integrated time-weighted squared error).
The results show the NLVG-PID controller had a peak angle response time of 0.15 seconds and a peak position response time of 0.37 seconds. These performance metrics are presented in Fig. 5 and Table 1 of the paper.
The key points from the provided text are:
- The initial parameters for the quadcopter's inner loop controller are set as:
- Roll (φ) PID: (8, 0.1, 5)
- Pitch (θ) PID: (8, 0.1, 5)
- Yaw (ψ) PID: (8, 0.1, 5)
- The outer loop position controller initial parameters are similar but with slightly lower values.
- The scalar gains δ1 and δ2 are set to 0.01 and 0.838, respectively, and the control parameters are learned using Evolutionary Strategies.
- The simulation uses a step size of 0.01 seconds and a total time of 140 seconds.
4.1 Example 1: Storm Path Following
- The aircraft follows a storm-type obstacle avoidance path, which is a continuous arc with increasing radius and height.
- Both the PID and NLVG-PID controllers are able to reduce the attitude angle and position errors as the aircraft executes the storm path.
- The NLVG-PID controller shows improved performance compared to the fixed-gain PID.
4.2 Example 2: Lissajous Curve Following
- The aircraft tracks a 3D Lissajous curve, which has periodic changes in height and position.
- Similar to the storm path, the NLVG-PID controller outperforms the fixed-gain PID in reducing attitude angle and position errors.
- However, the performance improvement is slightly reduced compared to the storm path example, likely due to the increased complexity of the Lissajous trajectory.
Conclusion
This paper proposes a new design scheme for adaptive learning control of quadcopter flight controllers. The authors present an NLVG-PID controller for the UAV model and use Extremum Seeking (ES) to learn optimal NLVG-PID parameters offline. Numerical simulations show the proposed adaptive learning controller can reduce response overshoot and settling time in typical 3D flight paths, such as storm paths.
References
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers

Model Predictive Contouring Control for Vehicle Obstacle Avoidance at the Limit of Handling Using Torque Vectoring
Alberto Bertipaglia, Davide Tavernini, Umberto Montanaro, Mohsen Alirezaei, Riender Happee, Aldo Sorniotti, Barys Shyrokau
0
0
This paper presents an original approach to vehicle obstacle avoidance. It involves the development of a nonlinear Model Predictive Contouring Control, which uses torque vectoring to stabilise and drive the vehicle in evasive manoeuvres at the limit of handling. The proposed algorithm combines motion planning, path tracking and vehicle stability objectives, prioritising collision avoidance in emergencies. The controller's prediction model is a nonlinear double-track vehicle model based on an extended Fiala tyre to capture the nonlinear coupled longitudinal and lateral dynamics. The controller computes the optimal steering angle and the longitudinal forces per each of the four wheels to minimise tracking error in safe situations and maximise the vehicle-to-obstacle distance in emergencies. Thanks to the optimisation of the longitudinal tyre forces, the proposed controller can produce an extra yaw moment, increasing the vehicle's lateral agility to avoid obstacles while keeping the vehicle stable. The optimal forces are constrained in the tyre friction circle not to exceed the tyres and vehicle capabilities. In a high-fidelity simulation environment, we demonstrate the benefits of torque vectoring, showing that our proposed approach is capable of successfully avoiding obstacles and keeping the vehicle stable while driving a double-lane change manoeuvre, in comparison to baselines lacking torque vectoring or collision avoidance prioritisation.
5/20/2024
Deep Reinforcement Learning-based Quadcopter Controller: A Practical Approach and Experiments
Truong-Dong Do, Nguyen Xuan Mung, Sung Kyung Hong
0
0
Quadcopters have been studied for decades thanks to their maneuverability and capability of operating in a variety of circumstances. However, quadcopters suffer from dynamical nonlinearity, actuator saturation, as well as sensor noise that make it challenging and time consuming to obtain accurate dynamic models and achieve satisfactory control performance. Fortunately, deep reinforcement learning came and has shown significant potential in system modelling and control of autonomous multirotor aerial vehicles, with recent advancements in deployment, performance enhancement, and generalization. In this paper, an end-to-end deep reinforcement learning-based controller for quadcopters is proposed that is secure for real-world implementation, data-efficient, and free of human gain adjustments. First, a novel actor-critic-based architecture is designed to map the robot states directly to the motor outputs. Then, a quadcopter dynamics-based simulator was devised to facilitate the training of the controller policy. Finally, the trained policy is deployed on a real Crazyflie nano quadrotor platform, without any additional fine-tuning process. Experimental results show that the quadcopter exhibits satisfactory performance as it tracks a given complicated trajectory, which demonstrates the effectiveness and feasibility of the proposed method and signifies its capability in filling the simulation-to-reality gap.
6/19/2024

Hybrid Feedback for Three-dimensional Convex Obstacle Avoidance (Extended version)
Mayur Sawant, Ilia Polushin, Abdelhamid Tayebi
0
0
We propose a hybrid feedback control scheme for the autonomous robot navigation problem in three-dimensional environments with arbitrarily-shaped convex obstacles. The proposed hybrid control strategy, which consists in switching between the move-to-target mode and the obstacle-avoidance mode, guarantees global asymptotic stability of the target location in the obstacle-free workspace. We also provide a procedure for the implementation of the proposed hybrid controller in a priori unknown environments and validate its effectiveness through simulation results.
5/9/2024
Nonlinear Model Predictive Control of Tiltrotor Quadrotors with Feasible Control Allocation
Zeinab Shayan, Jann Cristobal, Mohammadreza Izadi, Amin Yazdanshenas, Mehdi Naderi, Reza Faieghi
0
0
This paper presents a new flight control framework for tilt-rotor multirotor uncrewed aerial vehicles (MRUAVs). Tiltrotor designs offer full actuation but introduce complexity in control allocation due to actuator redundancy. We propose a new approach where the allocator is tightly coupled with the controller, ensuring that the control signals generated by the controller are feasible within the vehicle actuation space. We leverage nonlinear model predictive control (NMPC) to implement the above framework, providing feasible control signals and optimizing performance. This unified control structure simultaneously manages both position and attitude, which eliminates the need for cascaded position and attitude control loops. Extensive numerical experiments demonstrate that our approach significantly outperforms conventional techniques that are based on linear quadratic regulator (LQR) and sliding mode control (SMC), especially in high-acceleration trajectories and disturbance rejection scenarios, making the proposed approach a viable option for enhanced control precision and robustness, particularly in challenging missions.
6/26/2024