Low-Light Image Enhancement Framework for Improved Object Detection in Fisheye Lens Datasets
2404.10078
0
0
Abstract
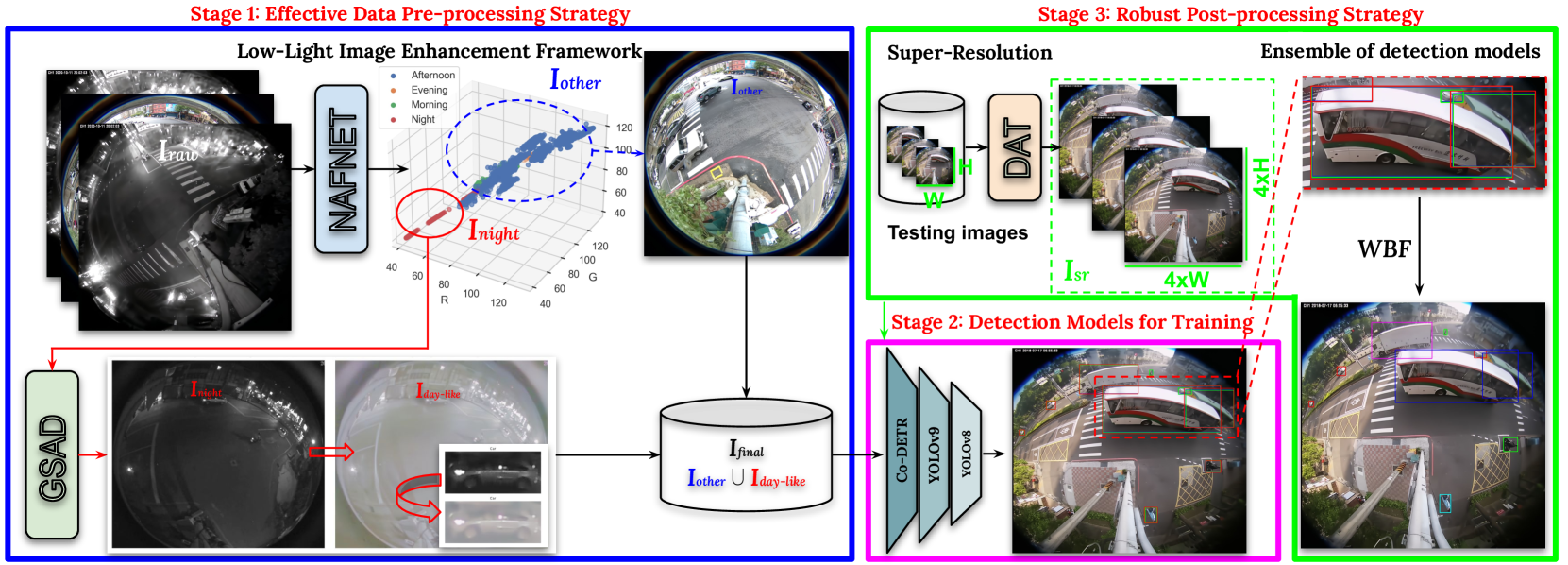
This study addresses the evolving challenges in urban traffic monitoring detection systems based on fisheye lens cameras by proposing a framework that improves the efficacy and accuracy of these systems. In the context of urban infrastructure and transportation management, advanced traffic monitoring systems have become critical for managing the complexities of urbanization and increasing vehicle density. Traditional monitoring methods, which rely on static cameras with narrow fields of view, are ineffective in dynamic urban environments, necessitating the installation of multiple cameras, which raises costs. Fisheye lenses, which were recently introduced, provide wide and omnidirectional coverage in a single frame, making them a transformative solution. However, issues such as distorted views and blurriness arise, preventing accurate object detection on these images. Motivated by these challenges, this study proposes a novel approach that combines a ransformer-based image enhancement framework and ensemble learning technique to address these challenges and improve traffic monitoring accuracy, making significant contributions to the future of intelligent traffic management systems. Our proposed methodological framework won 5th place in the 2024 AI City Challenge, Track 4, with an F1 score of 0.5965 on experimental validation data. The experimental results demonstrate the effectiveness, efficiency, and robustness of the proposed system. Our code is publicly available at https://github.com/daitranskku/AIC2024-TRACK4-TEAM15.
Get summaries of the top AI research delivered straight to your inbox:
Overview
- This paper presents a low-light image enhancement framework to improve object detection in fisheye lens datasets.
- The framework aims to enhance the quality of low-light images captured by fisheye lenses, which often suffer from distortion and poor illumination.
- The enhanced images are then used to train object detection models, leading to improved performance compared to models trained on original low-light fisheye images.
Plain English Explanation
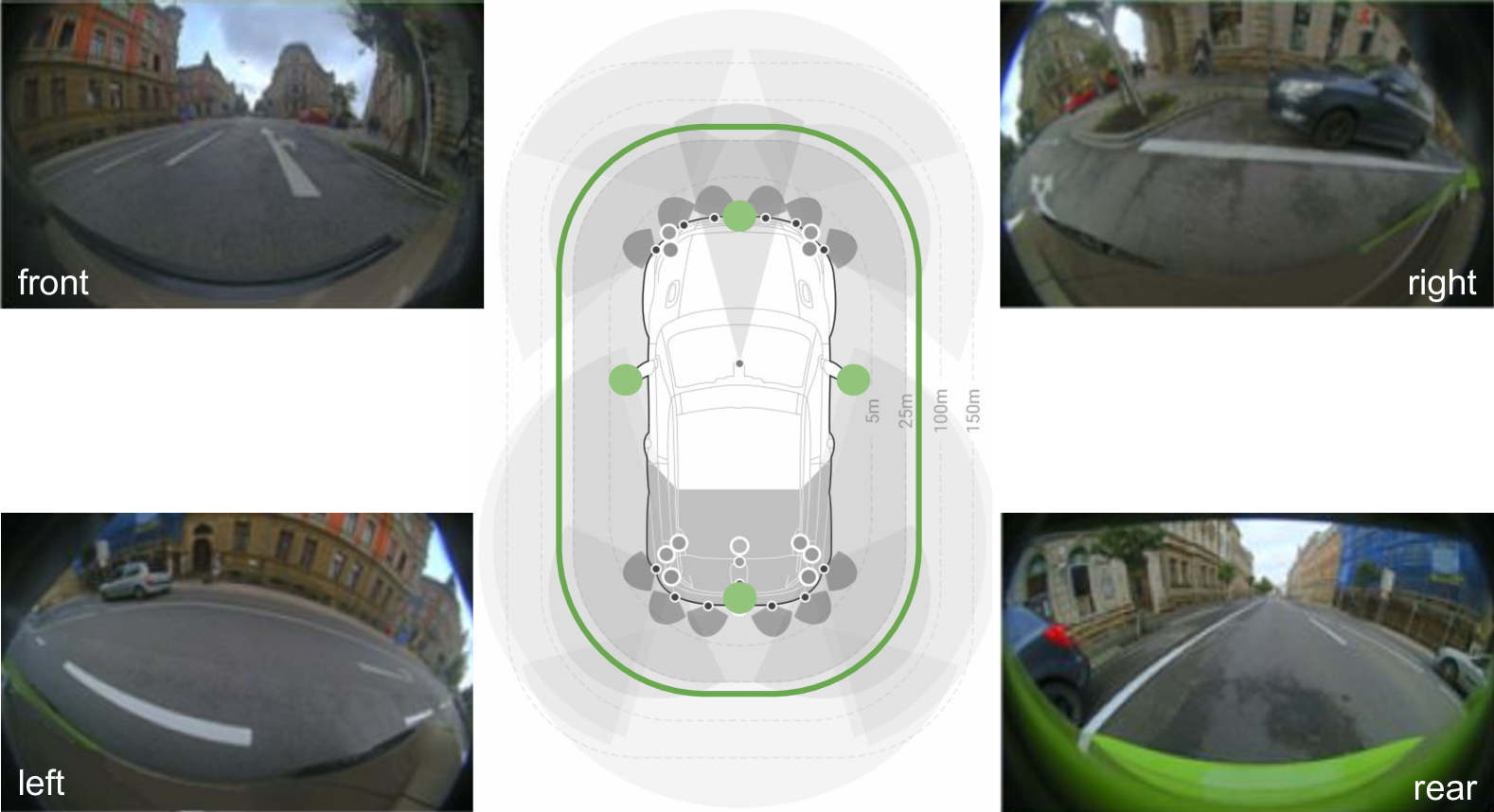
Fisheye lenses are a type of wide-angle camera lens that can capture a very broad field of view. However, images captured by fisheye lenses often suffer from distortion and poor lighting, especially in low-light conditions. This can make it challenging to accurately detect objects in these images.
The researchers in this paper developed a framework to enhance low-light fisheye images before using them to train object detection models. Their approach applies various image processing techniques to improve the brightness, contrast, and overall quality of the images. This results in detection models that perform better on the enhanced images compared to models trained on the original low-quality fisheye data.
By improving the input images, the researchers were able to overcome some of the challenges posed by fisheye lens distortion and poor lighting, leading to more accurate object detection. This could be particularly useful in applications like autonomous vehicles, surveillance systems, or 360-degree cameras, where fisheye lenses are commonly used to capture a wide field of view.
Technical Explanation
The researchers' low-light image enhancement framework consists of several key components:
-
Low-Light Enhancement Module: This module applies a series of image processing operations, such as histogram equalization, gamma correction, and edge-preserving smoothing, to improve the brightness, contrast, and overall quality of the low-light fisheye images.
-
Distortion Correction Module: To address the inherent distortion of fisheye lenses, the researchers incorporate a distortion correction algorithm that warps the enhanced images to remove the fisheye effect.
-
Object Detection Model Training: The enhanced and distortion-corrected images are then used to train object detection models, such as YOLOv5 or Faster R-CNN. The researchers demonstrate that these models achieve higher accuracy on the enhanced fisheye images compared to models trained on the original low-light data.
The key insight behind this framework is that by improving the quality of the input images, the object detection models can learn more robust and accurate representations of the objects, leading to better overall performance.
Critical Analysis
The researchers acknowledge several limitations and areas for further research in their paper:
- The framework was evaluated on a single fisheye lens dataset, and its effectiveness may vary with different camera models or environmental conditions.
- The distortion correction module assumes a specific fisheye lens model, and its performance may degrade for lenses with different distortion characteristics.
- The paper does not provide a detailed analysis of the computational cost and inference time of the enhanced object detection models, which could be an important consideration for real-world applications.
Additionally, the researchers do not address the potential impact of their framework on the privacy and ethical implications of object detection in low-light, wide-angle camera systems. Further research could explore these aspects and propose guidelines for the responsible development and deployment of such technologies.
Conclusion
The low-light image enhancement framework presented in this paper offers a promising approach to improving object detection performance in fisheye lens datasets. By enhancing the quality of the input images, the researchers were able to train object detection models that achieved higher accuracy compared to models trained on the original low-light fisheye data.
This work could have significant implications for applications that rely on wide-angle, low-light camera systems, such as autonomous vehicles, surveillance systems, and 360-degree cameras. By improving object detection in these challenging environments, the framework could contribute to advancements in areas like safety, security, and situational awareness.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
FisheyeDetNet: Object Detection on Fisheye Surround View Camera Systems for Automated Driving
Ganesh Sistu, Senthil Yogamani
0
0
Object detection is a mature problem in autonomous driving with pedestrian detection being one of the first deployed algorithms. It has been comprehensively studied in the literature. However, object detection is relatively less explored for fisheye cameras used for surround-view near field sensing. The standard bounding box representation fails in fisheye cameras due to heavy radial distortion, particularly in the periphery. To mitigate this, we explore extending the standard object detection output representation of bounding box. We design rotated bounding boxes, ellipse, generic polygon as polar arc/angle representations and define an instance segmentation mIOU metric to analyze these representations. The proposed model FisheyeDetNet with polygon outperforms others and achieves a mAP score of 49.5 % on Valeo fisheye surround-view dataset for automated driving applications. This dataset has 60K images captured from 4 surround-view cameras across Europe, North America and Asia. To the best of our knowledge, this is the first detailed study on object detection on fisheye cameras for autonomous driving scenarios.
4/30/2024
🔎
Low-light Object Detection
Pengpeng Li, Haowei Gu, Yang Yang
0
0
In this competition we employed a model fusion approach to achieve object detection results close to those of real images. Our method is based on the CO-DETR model, which was trained on two sets of data: one containing images under dark conditions and another containing images enhanced with low-light conditions. We used various enhancement techniques on the test data to generate multiple sets of prediction results. Finally, we applied a clustering aggregation method guided by IoU thresholds to select the optimal results.
5/7/2024
🖼️
Location-guided Head Pose Estimation for Fisheye Image
Bing Li, Dong Zhang, Cheng Huang, Yun Xian, Ming Li, Dah-Jye Lee
0
0
Camera with a fisheye or ultra-wide lens covers a wide field of view that cannot be modeled by the perspective projection. Serious fisheye lens distortion in the peripheral region of the image leads to degraded performance of the existing head pose estimation models trained on undistorted images. This paper presents a new approach for head pose estimation that uses the knowledge of head location in the image to reduce the negative effect of fisheye distortion. We develop an end-to-end convolutional neural network to estimate the head pose with the multi-task learning of head pose and head location. Our proposed network estimates the head pose directly from the fisheye image without the operation of rectification or calibration. We also created a fisheye-distorted version of the three popular head pose estimation datasets, BIWI, 300W-LP, and AFLW2000 for our experiments. Experiments results show that our network remarkably improves the accuracy of head pose estimation compared with other state-of-the-art one-stage and two-stage methods.
4/11/2024
🔍
Multi-Object Tracking in the Dark
Xinzhe Wang, Kang Ma, Qiankun Liu, Yunhao Zou, Ying Fu
0
0
Low-light scenes are prevalent in real-world applications (e.g. autonomous driving and surveillance at night). Recently, multi-object tracking in various practical use cases have received much attention, but multi-object tracking in dark scenes is rarely considered. In this paper, we focus on multi-object tracking in dark scenes. To address the lack of datasets, we first build a Low-light Multi-Object Tracking (LMOT) dataset. LMOT provides well-aligned low-light video pairs captured by our dual-camera system, and high-quality multi-object tracking annotations for all videos. Then, we propose a low-light multi-object tracking method, termed as LTrack. We introduce the adaptive low-pass downsample module to enhance low-frequency components of images outside the sensor noises. The degradation suppression learning strategy enables the model to learn invariant information under noise disturbance and image quality degradation. These components improve the robustness of multi-object tracking in dark scenes. We conducted a comprehensive analysis of our LMOT dataset and proposed LTrack. Experimental results demonstrate the superiority of the proposed method and its competitiveness in real night low-light scenes. Dataset and Code: https: //github.com/ying-fu/LMOT
5/13/2024