Mahalanobis k-NN: A Statistical Lens for Robust Point-Cloud Registrations

0

Sign in to get full access
Overview
- The paper presents a new metric called Mahalanobis k-NN for robust point cloud registration.
- It introduces a statistical lens for point cloud matching that is more resilient to noise and outliers compared to traditional Euclidean distance-based methods.
- The key insight is to leverage the Mahalanobis distance, which accounts for the covariance structure of the data, to improve the nearest neighbor search.
Plain English Explanation
The paper introduces a new way to compare and match point clouds, which are 3D representations of objects or environments made up of many individual data points. Matching point clouds is an important task in 3D computer vision and robotics, such as for aligning sensor data or registering 3D models.
The authors propose using the Mahalanobis distance instead of the more common Euclidean distance to find the nearest neighbors between two point clouds. The Mahalanobis distance takes into account the statistical properties of the data, like how the points are distributed, which makes it more robust to noise and outliers compared to a simple distance calculation.
By using this statistical perspective, the authors show their Mahalanobis k-NN approach can more accurately register point clouds, even in the presence of distortions or missing data. This could lead to improvements in applications like autonomous navigation, 3D mapping, and object recognition.
Technical Explanation
The key innovation of the paper is the use of the Mahalanobis distance for the nearest neighbor search in point cloud registration. Traditional methods rely on the Euclidean distance, which treats all dimensions equally and does not account for the underlying distribution of the data points.
In contrast, the Mahalanobis distance normalizes the data by the covariance matrix, which captures the statistical relationships between the dimensions. This makes the distance metric more sensitive to the structure of the point cloud, rather than just the raw spatial coordinates.
The authors show that by using Mahalanobis k-NN, the point cloud registration process becomes more robust to challenges like noise, outliers, and missing data. This is because the statistical properties encoded in the covariance matrix help distinguish true correspondences from spurious matches.
Through extensive experiments on standard benchmarks, the authors demonstrate that Mahalanobis k-NN outperforms previous state-of-the-art methods for rigid and non-rigid point cloud registration tasks. They also analyze the computational complexity and show the approach remains efficient in practice.
Critical Analysis
The paper provides a compelling case for using a more statistically-grounded distance metric for point cloud registration. By accounting for the underlying data structure, Mahalanobis k-NN can overcome some of the limitations of standard Euclidean-based methods, which can be sensitive to noise and outliers.
However, the authors acknowledge that the Mahalanobis distance does come with some additional computational overhead compared to simpler distance measures. They show the approach remains efficient, but it may still be a consideration for real-time or resource-constrained applications.
Additionally, the paper focuses on evaluating Mahalanobis k-NN in controlled benchmark settings. While these provide useful baselines, it would be interesting to see how the method performs in more complex, real-world scenarios with diverse sensor modalities and environmental conditions.
Further research could also explore ways to make the covariance estimation more robust, as it is a critical component of the Mahalanobis distance calculation. Techniques like robust principal component analysis or employing neural network-based covariance estimators may be fruitful avenues to investigate.
Conclusion
The Mahalanobis k-NN approach presented in this paper offers a promising statistical lens for improving the robustness of point cloud registration. By leveraging the Mahalanobis distance, the method can better capture the underlying structure of the data, leading to more accurate correspondences even in the presence of noise and outliers.
This work has the potential to advance the state-of-the-art in 3D computer vision and robotics applications that rely on aligning sensor data or 3D models. The statistical insights could also inspire further research into developing more resilient and generalizable point cloud processing techniques.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Mahalanobis k-NN: A Statistical Lens for Robust Point-Cloud Registrations
Tejas Anvekar, Shivanand Venkanna Sheshappanavar
In this paper, we discuss Mahalanobis k-NN: a statistical lens designed to address the challenges of feature matching in learning-based point cloud registration when confronted with an arbitrary density of point clouds, either in the source or target point cloud. We tackle this by adopting Mahalanobis k-NN's inherent property to capture the distribution of the local neighborhood and surficial geometry. Our method can be seamlessly integrated into any local-graph-based point cloud analysis method. In this paper, we focus on two distinct methodologies: Deep Closest Point (DCP) and Deep Universal Manifold Embedding (DeepUME). Our extensive benchmarking on the ModelNet40 and Faust datasets highlights the efficacy of the proposed method in point cloud registration tasks. Moreover, we establish for the first time that the features acquired through point cloud registration inherently can possess discriminative capabilities. This is evident by a substantial improvement of about 20% in the average accuracy observed in the point cloud few-shot classification task benchmarked on ModelNet40 and ScanObjectNN. The code is publicly available at https://github.com/TejasAnvekar/Mahalanobis-k-NN
Read more9/11/2024

0
Dimensionality Reduction and Nearest Neighbors for Improving Out-of-Distribution Detection in Medical Image Segmentation
McKell Woodland, Nihil Patel, Austin Castelo, Mais Al Taie, Mohamed Eltaher, Joshua P. Yung, Tucker J. Netherton, Tiffany L. Calderone, Jessica I. Sanchez, Darrel W. Cleere, Ahmed Elsaiey, Nakul Gupta, David Victor, Laura Beretta, Ankit B. Patel, Kristy K. Brock
Clinically deployed deep learning-based segmentation models are known to fail on data outside of their training distributions. While clinicians review the segmentations, these models tend to perform well in most instances, which could exacerbate automation bias. Therefore, detecting out-of-distribution images at inference is critical to warn the clinicians that the model likely failed. This work applied the Mahalanobis distance (MD) post hoc to the bottleneck features of four Swin UNETR and nnU-net models that segmented the liver on T1-weighted magnetic resonance imaging and computed tomography. By reducing the dimensions of the bottleneck features with either principal component analysis or uniform manifold approximation and projection, images the models failed on were detected with high performance and minimal computational load. In addition, this work explored a non-parametric alternative to the MD, a k-th nearest neighbors distance (KNN). KNN drastically improved scalability and performance over MD when both were applied to raw and average-pooled bottleneck features.
Read more9/10/2024

0
Correspondence-Free Non-Rigid Point Set Registration Using Unsupervised Clustering Analysis
Mingyang Zhao, Jingen Jiang, Lei Ma, Shiqing Xin, Gaofeng Meng, Dong-Ming Yan
This paper presents a novel non-rigid point set registration method that is inspired by unsupervised clustering analysis. Unlike previous approaches that treat the source and target point sets as separate entities, we develop a holistic framework where they are formulated as clustering centroids and clustering members, separately. We then adopt Tikhonov regularization with an $ell_1$-induced Laplacian kernel instead of the commonly used Gaussian kernel to ensure smooth and more robust displacement fields. Our formulation delivers closed-form solutions, theoretical guarantees, independence from dimensions, and the ability to handle large deformations. Subsequently, we introduce a clustering-improved Nystrom method to effectively reduce the computational complexity and storage of the Gram matrix to linear, while providing a rigorous bound for the low-rank approximation. Our method achieves high accuracy results across various scenarios and surpasses competitors by a significant margin, particularly on shapes with substantial deformations. Additionally, we demonstrate the versatility of our method in challenging tasks such as shape transfer and medical registration.
Read more6/28/2024
0
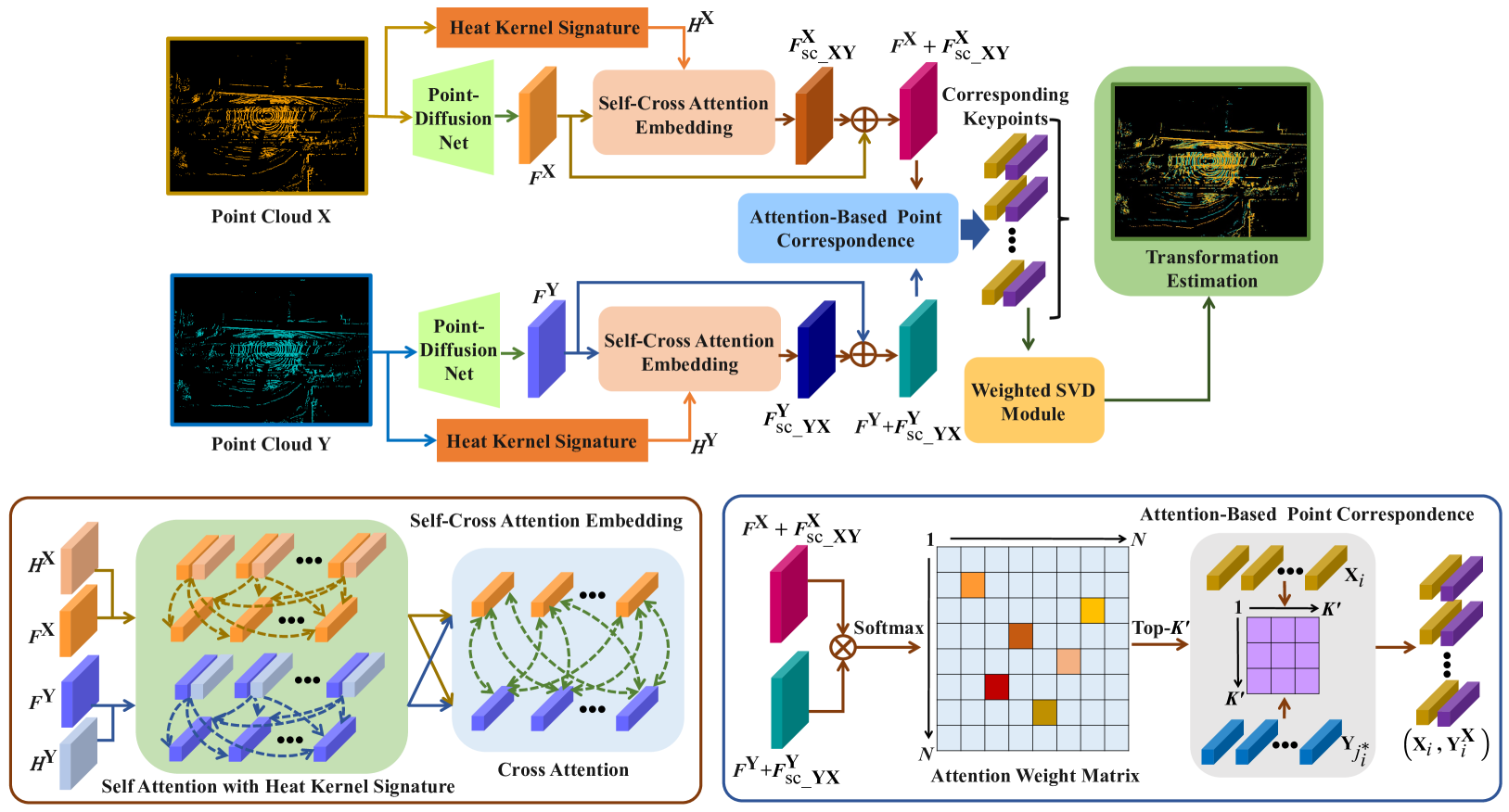
PointDifformer: Robust Point Cloud Registration With Neural Diffusion and Transformer
Rui She, Qiyu Kang, Sijie Wang, Wee Peng Tay, Kai Zhao, Yang Song, Tianyu Geng, Yi Xu, Diego Navarro Navarro, Andreas Hartmannsgruber
Point cloud registration is a fundamental technique in 3-D computer vision with applications in graphics, autonomous driving, and robotics. However, registration tasks under challenging conditions, under which noise or perturbations are prevalent, can be difficult. We propose a robust point cloud registration approach that leverages graph neural partial differential equations (PDEs) and heat kernel signatures. Our method first uses graph neural PDE modules to extract high dimensional features from point clouds by aggregating information from the 3-D point neighborhood, thereby enhancing the robustness of the feature representations. Then, we incorporate heat kernel signatures into an attention mechanism to efficiently obtain corresponding keypoints. Finally, a singular value decomposition (SVD) module with learnable weights is used to predict the transformation between two point clouds. Empirical experiments on a 3-D point cloud dataset demonstrate that our approach not only achieves state-of-the-art performance for point cloud registration but also exhibits better robustness to additive noise or 3-D shape perturbations.
Read more4/23/2024