MambaEVT: Event Stream based Visual Object Tracking using State Space Model

0

Sign in to get full access
Overview
- This paper presents MambaEVT, an event-based visual object tracking system that uses a state space model.
- MambaEVT tracks objects by leveraging the advantages of event-based sensors, which capture asynchronous changes in a scene with high temporal resolution.
- The system models the object's state over time using a Kalman filter, allowing it to handle occlusions and abrupt motions effectively.
Plain English Explanation
MambaEVT: Event Stream based Visual Object Tracking using State Space Model is a new approach to visual object tracking that takes advantage of event-based sensors. These sensors capture changes in a scene as they happen, rather than recording a continuous video stream.
The key idea behind MambaEVT is to use a state space model to track the position and movement of objects over time. This allows the system to handle challenging situations like when an object is briefly occluded or moves abruptly. The state space model, implemented using a Kalman filter, continuously updates its estimate of the object's location and velocity based on the incoming event data.
By leveraging the high temporal resolution and sparse nature of event-based sensors, MambaEVT is able to track objects more effectively than traditional video-based approaches, especially in dynamic environments with rapid motion or occlusions.
Technical Explanation
The core of MambaEVT is a state space model that represents the object's position and velocity over time. This model is updated using a Kalman filter, which recursively estimates the object's state based on the incoming event data from the sensor.
The state space model consists of a state vector that encodes the object's 2D position and velocity, and a transition matrix that describes how the object's state evolves between time steps. The Kalman filter then uses this model to predict the object's future state and correct its estimate based on the observed events.
To initialize the tracking, MambaEVT first performs object detection on a short burst of events to localize the target. It then launches the Kalman filter-based tracking, which continuously updates the object's state as new events are received. The system is able to handle occlusions and abrupt motions by relying on the predictive power of the state space model.
Critical Analysis
The authors acknowledge that MambaEVT, like other event-based tracking systems, relies on the availability of suitable event-based sensors. While the technology is becoming more widespread, it may not be feasible in all scenarios. Additionally, the performance of the system could be affected by factors such as sensor noise or the complexity of the scene.
The paper does not provide a detailed comparison to state-of-the-art video-based tracking methods, which limits the ability to fully assess the relative strengths and weaknesses of the MambaEVT approach. Further research could explore how MambaEVT performs against a broader range of benchmarks and in more diverse real-world environments.
Conclusion
MambaEVT presents a novel approach to visual object tracking that leverages the advantages of event-based sensors and a state space model to handle challenging scenarios like occlusions and abrupt motions. By continuously updating the object's estimated position and velocity, the system is able to maintain robust tracking performance even in dynamic environments.
While the reliance on specialized hardware and the need for further benchmarking are potential limitations, the core ideas behind MambaEVT demonstrate the potential of event-based techniques to advance the state of the art in visual tracking. As event-based sensors become more widely adopted, systems like MambaEVT could play an important role in applications ranging from robotics and autonomous vehicles to video surveillance and sports analytics.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
MambaEVT: Event Stream based Visual Object Tracking using State Space Model
Xiao Wang, Chao wang, Shiao Wang, Xixi Wang, Zhicheng Zhao, Lin Zhu, Bo Jiang
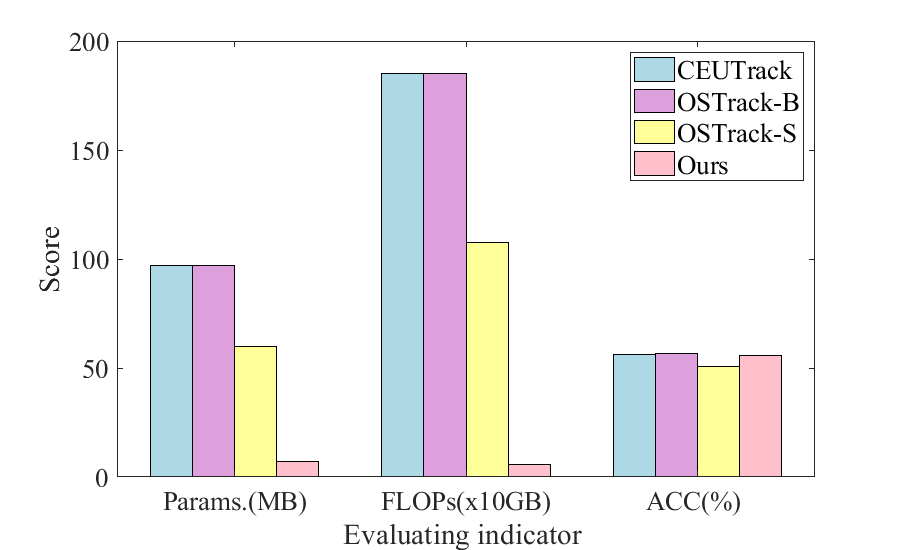
Event camera-based visual tracking has drawn more and more attention in recent years due to the unique imaging principle and advantages of low energy consumption, high dynamic range, and dense temporal resolution. Current event-based tracking algorithms are gradually hitting their performance bottlenecks, due to the utilization of vision Transformer and the static template for target object localization. In this paper, we propose a novel Mamba-based visual tracking framework that adopts the state space model with linear complexity as a backbone network. The search regions and target template are fed into the vision Mamba network for simultaneous feature extraction and interaction. The output tokens of search regions will be fed into the tracking head for target localization. More importantly, we consider introducing a dynamic template update strategy into the tracking framework using the Memory Mamba network. By considering the diversity of samples in the target template library and making appropriate adjustments to the template memory module, a more effective dynamic template can be integrated. The effective combination of dynamic and static templates allows our Mamba-based tracking algorithm to achieve a good balance between accuracy and computational cost on multiple large-scale datasets, including EventVOT, VisEvent, and FE240hz. The source code will be released on https://github.com/Event-AHU/MambaEVT
Read more8/21/2024
0
Mamba-FETrack: Frame-Event Tracking via State Space Model
Ju Huang, Shiao Wang, Shuai Wang, Zhe Wu, Xiao Wang, Bo Jiang
RGB-Event based tracking is an emerging research topic, focusing on how to effectively integrate heterogeneous multi-modal data (synchronized exposure video frames and asynchronous pulse Event stream). Existing works typically employ Transformer based networks to handle these modalities and achieve decent accuracy through input-level or feature-level fusion on multiple datasets. However, these trackers require significant memory consumption and computational complexity due to the use of self-attention mechanism. This paper proposes a novel RGB-Event tracking framework, Mamba-FETrack, based on the State Space Model (SSM) to achieve high-performance tracking while effectively reducing computational costs and realizing more efficient tracking. Specifically, we adopt two modality-specific Mamba backbone networks to extract the features of RGB frames and Event streams. Then, we also propose to boost the interactive learning between the RGB and Event features using the Mamba network. The fused features will be fed into the tracking head for target object localization. Extensive experiments on FELT and FE108 datasets fully validated the efficiency and effectiveness of our proposed tracker. Specifically, our Mamba-based tracker achieves 43.5/55.6 on the SR/PR metric, while the ViT-S based tracker (OSTrack) obtains 40.0/50.9. The GPU memory cost of ours and ViT-S based tracker is 13.98GB and 15.44GB, which decreased about $9.5%$. The FLOPs and parameters of ours/ViT-S based OSTrack are 59GB/1076GB and 7MB/60MB, which decreased about $94.5%$ and $88.3%$, respectively. We hope this work can bring some new insights to the tracking field and greatly promote the application of the Mamba architecture in tracking. The source code of this work will be released on url{https://github.com/Event-AHU/Mamba_FETrack}.
Read more4/30/2024

0
MambaTrack: A Simple Baseline for Multiple Object Tracking with State Space Model
Changcheng Xiao, Qiong Cao, Zhigang Luo, Long Lan
Tracking by detection has been the prevailing paradigm in the field of Multi-object Tracking (MOT). These methods typically rely on the Kalman Filter to estimate the future locations of objects, assuming linear object motion. However, they fall short when tracking objects exhibiting nonlinear and diverse motion in scenarios like dancing and sports. In addition, there has been limited focus on utilizing learning-based motion predictors in MOT. To address these challenges, we resort to exploring data-driven motion prediction methods. Inspired by the great expectation of state space models (SSMs), such as Mamba, in long-term sequence modeling with near-linear complexity, we introduce a Mamba-based motion model named Mamba moTion Predictor (MTP). MTP is designed to model the complex motion patterns of objects like dancers and athletes. Specifically, MTP takes the spatial-temporal location dynamics of objects as input, captures the motion pattern using a bi-Mamba encoding layer, and predicts the next motion. In real-world scenarios, objects may be missed due to occlusion or motion blur, leading to premature termination of their trajectories. To tackle this challenge, we further expand the application of MTP. We employ it in an autoregressive way to compensate for missing observations by utilizing its own predictions as inputs, thereby contributing to more consistent trajectories. Our proposed tracker, MambaTrack, demonstrates advanced performance on benchmarks such as Dancetrack and SportsMOT, which are characterized by complex motion and severe occlusion.
Read more8/20/2024

0
MambaVT: Spatio-Temporal Contextual Modeling for robust RGB-T Tracking
Simiao Lai, Chang Liu, Jiawen Zhu, Ben Kang, Yang Liu, Dong Wang, Huchuan Lu
Existing RGB-T tracking algorithms have made remarkable progress by leveraging the global interaction capability and extensive pre-trained models of the Transformer architecture. Nonetheless, these methods mainly adopt imagepair appearance matching and face challenges of the intrinsic high quadratic complexity of the attention mechanism, resulting in constrained exploitation of temporal information. Inspired by the recently emerged State Space Model Mamba, renowned for its impressive long sequence modeling capabilities and linear computational complexity, this work innovatively proposes a pure Mamba-based framework (MambaVT) to fully exploit spatio-temporal contextual modeling for robust visible-thermal tracking. Specifically, we devise the long-range cross-frame integration component to globally adapt to target appearance variations, and introduce short-term historical trajectory prompts to predict the subsequent target states based on local temporal location clues. Extensive experiments show the significant potential of vision Mamba for RGB-T tracking, with MambaVT achieving state-of-the-art performance on four mainstream benchmarks while requiring lower computational costs. We aim for this work to serve as a simple yet strong baseline, stimulating future research in this field. The code and pre-trained models will be made available.
Read more8/16/2024