MAN TruckScenes: A multimodal dataset for autonomous trucking in diverse conditions

0
Sign in to get full access
Overview
- This paper presents a new multimodal dataset called "MAN TruckScenes" for autonomous trucking in diverse conditions.
- The dataset includes sensor data from cameras, LiDAR, radar, and vehicle telemetry, covering a wide range of driving scenarios and environmental conditions.
- The authors aim to support the development of advanced perception and control algorithms for autonomous trucks operating in complex, real-world settings.
Plain English Explanation
The researchers have created a new dataset called "MAN TruckScenes" that contains information collected from sensors on trucks driving in various conditions. This includes data from cameras, lasers (LiDAR), radar, and the truck's own systems. The goal is to provide a comprehensive set of data to help develop self-driving algorithms for trucks that can handle a wide range of driving situations and environments, such as different weather, traffic, and road conditions.
Having this diverse dataset can be very useful for [object Object], as it allows researchers to create [object Object] that can handle the complexities of the real world. This is important for making self-driving trucks a practical and safe reality.
Technical Explanation
The "MAN TruckScenes" dataset was collected using a fleet of trucks equipped with a variety of sensors, including [object Object]. The trucks were driven through a wide range of environments and conditions, such as different weather, traffic, and road types. This resulted in a large, diverse dataset covering numerous driving scenarios.
The dataset includes synchronized sensor data, vehicle telemetry, and annotations. This allows researchers to [object Object] for autonomous trucks. The availability of rich, multimodal data can enable [object Object] compared to using individual sensor modalities in isolation.
Critical Analysis
The authors acknowledge that the dataset does not cover every possible driving scenario, and further expansion and refinement may be needed. Additionally, the dataset is focused on autonomous trucking, so the applicability to other autonomous vehicle domains may be limited.
Researchers should also be aware of potential biases in the data, such as overrepresentation of certain geographic regions or driving conditions. It will be important to carefully evaluate the dataset's coverage and limitations when using it for algorithm development and testing.
Conclusion
The "MAN TruckScenes" dataset provides a valuable resource for advancing autonomous trucking technology. By offering a diverse, multimodal dataset covering a wide range of driving conditions, it can support the development of more robust and capable self-driving algorithms. This represents an important step towards realizing the potential of autonomous trucks to improve safety, efficiency, and sustainability in the transportation industry.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
MAN TruckScenes: A multimodal dataset for autonomous trucking in diverse conditions
Felix Fent, Fabian Kuttenreich, Florian Ruch, Farija Rizwin, Stefan Juergens, Lorenz Lechermann, Christian Nissler, Andrea Perl, Ulrich Voll, Min Yan, Markus Lienkamp
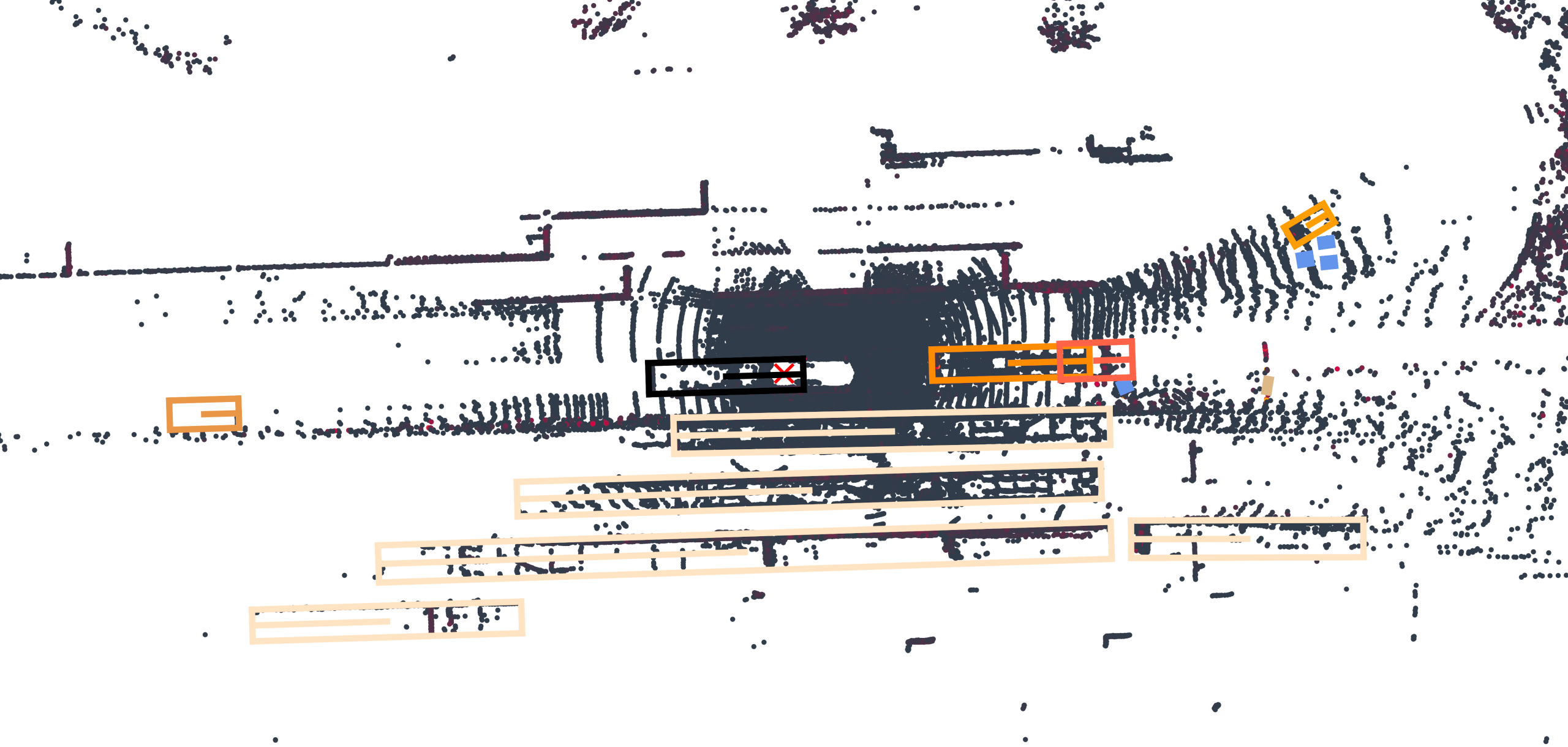
Autonomous trucking is a promising technology that can greatly impact modern logistics and the environment. Ensuring its safety on public roads is one of the main duties that requires an accurate perception of the environment. To achieve this, machine learning methods rely on large datasets, but to this day, no such datasets are available for autonomous trucks. In this work, we present MAN TruckScenes, the first multimodal dataset for autonomous trucking. MAN TruckScenes allows the research community to come into contact with truck-specific challenges, such as trailer occlusions, novel sensor perspectives, and terminal environments for the first time. It comprises more than 740 scenes of 20 s each within a multitude of different environmental conditions. The sensor set includes 4 cameras, 6 lidar, 6 radar sensors, 2 IMUs, and a high-precision GNSS. The dataset's 3D bounding boxes were manually annotated and carefully reviewed to achieve a high quality standard. Bounding boxes are available for 27 object classes, 15 attributes, and a range of more than 230 m. The scenes are tagged according to 34 distinct scene tags, and all objects are tracked throughout the scene to promote a wide range of applications. Additionally, MAN TruckScenes is the first dataset to provide 4D radar data with 360{deg} coverage and is thereby the largest radar dataset with annotated 3D bounding boxes. Finally, we provide extensive dataset analysis and baseline results. The dataset, development kit and more are available online.
Read more7/11/2024

0
Multiagent Multitraversal Multimodal Self-Driving: Open MARS Dataset
Yiming Li, Zhiheng Li, Nuo Chen, Moonjun Gong, Zonglin Lyu, Zehong Wang, Peili Jiang, Chen Feng
Large-scale datasets have fueled recent advancements in AI-based autonomous vehicle research. However, these datasets are usually collected from a single vehicle's one-time pass of a certain location, lacking multiagent interactions or repeated traversals of the same place. Such information could lead to transformative enhancements in autonomous vehicles' perception, prediction, and planning capabilities. To bridge this gap, in collaboration with the self-driving company May Mobility, we present the MARS dataset which unifies scenarios that enable MultiAgent, multitraveRSal, and multimodal autonomous vehicle research. More specifically, MARS is collected with a fleet of autonomous vehicles driving within a certain geographical area. Each vehicle has its own route and different vehicles may appear at nearby locations. Each vehicle is equipped with a LiDAR and surround-view RGB cameras. We curate two subsets in MARS: one facilitates collaborative driving with multiple vehicles simultaneously present at the same location, and the other enables memory retrospection through asynchronous traversals of the same location by multiple vehicles. We conduct experiments in place recognition and neural reconstruction. More importantly, MARS introduces new research opportunities and challenges such as multitraversal 3D reconstruction, multiagent perception, and unsupervised object discovery. Our data and codes can be found at https://ai4ce.github.io/MARS/.
Read more6/14/2024

0
SemanticSpray++: A Multimodal Dataset for Autonomous Driving in Wet Surface Conditions
Aldi Piroli, Vinzenz Dallabetta, Johannes Kopp, Marc Walessa, Daniel Meissner, Klaus Dietmayer
Autonomous vehicles rely on camera, LiDAR, and radar sensors to navigate the environment. Adverse weather conditions like snow, rain, and fog are known to be problematic for both camera and LiDAR-based perception systems. Currently, it is difficult to evaluate the performance of these methods due to the lack of publicly available datasets containing multimodal labeled data. To address this limitation, we propose the SemanticSpray++ dataset, which provides labels for camera, LiDAR, and radar data of highway-like scenarios in wet surface conditions. In particular, we provide 2D bounding boxes for the camera image, 3D bounding boxes for the LiDAR point cloud, and semantic labels for the radar targets. By labeling all three sensor modalities, the SemanticSpray++ dataset offers a comprehensive test bed for analyzing the performance of different perception methods when vehicles travel on wet surface conditions. Together with comprehensive label statistics, we also evaluate multiple baseline methods across different tasks and analyze their performances. The dataset will be available at https://semantic-spray-dataset.github.io .
Read more6/17/2024

0
RoboSense: Large-scale Dataset and Benchmark for Multi-sensor Low-speed Autonomous Driving
Haisheng Su, Feixiang Song, Cong Ma, Wei Wu, Junchi Yan
Robust object detection and tracking under arbitrary sight of view is challenging yet essential for the development of Autonomous Vehicle technology. With the growing demand of unmanned function vehicles, near-field scene understanding becomes an important research topic in the areas of low-speed autonomous driving. Due to the complexity of driving conditions and diversity of near obstacles such as blind spots and high occlusion, the perception capability of near-field environment is still inferior than its farther counterpart. To further enhance the intelligent ability of unmanned vehicles, in this paper, we construct a multimodal data collection platform based on 3 main types of sensors (Camera, LiDAR and Fisheye), which supports flexible sensor configurations to enable dynamic sight of view for ego vehicle, either global view or local view. Meanwhile, a large-scale multi-sensor dataset is built, named RoboSense, to facilitate near-field scene understanding. RoboSense contains more than 133K synchronized data with 1.4M 3D bounding box and IDs annotated in the full $360^{circ}$ view, forming 216K trajectories across 7.6K temporal sequences. It has $270times$ and $18times$ as many annotations of near-field obstacles within 5$m$ as the previous single-vehicle datasets such as KITTI and nuScenes. Moreover, we define a novel matching criterion for near-field 3D perception and prediction metrics. Based on RoboSense, we formulate 6 popular tasks to facilitate the future development of related research, where the detailed data analysis as well as benchmarks are also provided accordingly.
Read more9/17/2024