Multiagent Multitraversal Multimodal Self-Driving: Open MARS Dataset

0

Sign in to get full access
Overview
- Presents a new multiagent, multitraversal, multimodal dataset for self-driving car research called the \gradientRGBOpen MARS Dataset75,0,130193,68,14
- Focuses on developing robust multimodal perception systems for autonomous vehicles operating in complex, dynamic environments
- Explores challenges in multi-agent collaboration and data fusion across various sensor modalities
Plain English Explanation
This research paper introduces a new dataset called the \gradientRGBOpen MARS Dataset75,0,130193,68,14 that is designed to help develop advanced self-driving car systems. The dataset captures complex, real-world driving scenarios involving multiple autonomous vehicles and a variety of sensor types, such as cameras, LiDAR, and radar.
The key idea is to go beyond single-agent, single-sensor approaches to autonomous driving and instead focus on building perception systems that can effectively coordinate between multiple vehicles and fuse data from diverse sensors. This is important for enabling self-driving cars to operate safely and reliably in busy, unpredictable environments.
The \gradientRGBOpen MARS Dataset75,0,130193,68,14 provides a rich testbed for researchers to explore challenges like multi-agent collaboration, data fusion across modalities, and robust decision-making in the face of sensor uncertainties and dynamic changes. By providing this comprehensive dataset, the researchers hope to accelerate progress in the field of autonomous driving.
Technical Explanation
The \gradientRGBOpen MARS Dataset75,0,130193,68,14 is a large-scale multimodal dataset for self-driving car research that captures complex, real-world driving scenarios involving multiple autonomous vehicles. The dataset includes synchronized data from a variety of sensors, including RGB cameras, LiDAR, radar, and GPS/IMU, across multiple traversals of the same environments.
A key focus of the dataset is supporting research into multiagent collaboration and multimodal data fusion for robust perception. The dataset includes annotations for various objects, agents, and traffic participants, as well as ground truth information about the scene and vehicle dynamics. This allows researchers to develop and evaluate advanced techniques for tasks like object detection, tracking, behavior prediction, and collaborative decision-making.
The dataset was collected in diverse urban and suburban settings, featuring a range of weather conditions, lighting scenarios, and traffic densities. This diversity is crucial for training and evaluating self-driving algorithms that can generalize to the complexity of real-world driving.
Critical Analysis
The \gradientRGBOpen MARS Dataset75,0,130193,68,14 represents an important step forward in the development of comprehensive datasets for autonomous driving research. By focusing on multiagent, multimodal, and multitraversal scenarios, the dataset addresses key challenges that go beyond the limitations of many existing datasets, which often focus on single-agent, single-sensor approaches.
However, the dataset is not without its limitations. The researchers acknowledge that the scenes captured may not fully represent the full diversity of real-world driving conditions, and that there may be biases or inaccuracies in the ground truth annotations. Additionally, the dataset is focused on urban and suburban environments, and may not capture the unique challenges of rural or highway driving.
Further research is needed to explore the generalization of multimodal perception and collaboration techniques developed using the \gradientRGBOpen MARS Dataset75,0,130193,68,14 to other driving environments and domains. Integrating this dataset with other complementary datasets, such as COPED: Advancing Multi-Robot Collaborative Perception or Collective Perception Datasets for Autonomous Driving: A Comprehensive Review, could also lead to further advancements in the field.
Conclusion
The \gradientRGBOpen MARS Dataset75,0,130193,68,14 represents a significant contribution to the field of autonomous driving research, providing a rich testbed for developing and evaluating advanced multimodal perception and collaboration systems. By addressing the complex, dynamic nature of real-world driving scenarios, this dataset has the potential to accelerate progress towards safer and more reliable self-driving technologies.
As the field of autonomous driving continues to evolve, datasets like the \gradientRGBOpen MARS Dataset75,0,130193,68,14 will play a crucial role in driving innovation and ensuring that self-driving cars can navigate the challenges of the real world with confidence and reliability.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Multiagent Multitraversal Multimodal Self-Driving: Open MARS Dataset
Yiming Li, Zhiheng Li, Nuo Chen, Moonjun Gong, Zonglin Lyu, Zehong Wang, Peili Jiang, Chen Feng
Large-scale datasets have fueled recent advancements in AI-based autonomous vehicle research. However, these datasets are usually collected from a single vehicle's one-time pass of a certain location, lacking multiagent interactions or repeated traversals of the same place. Such information could lead to transformative enhancements in autonomous vehicles' perception, prediction, and planning capabilities. To bridge this gap, in collaboration with the self-driving company May Mobility, we present the MARS dataset which unifies scenarios that enable MultiAgent, multitraveRSal, and multimodal autonomous vehicle research. More specifically, MARS is collected with a fleet of autonomous vehicles driving within a certain geographical area. Each vehicle has its own route and different vehicles may appear at nearby locations. Each vehicle is equipped with a LiDAR and surround-view RGB cameras. We curate two subsets in MARS: one facilitates collaborative driving with multiple vehicles simultaneously present at the same location, and the other enables memory retrospection through asynchronous traversals of the same location by multiple vehicles. We conduct experiments in place recognition and neural reconstruction. More importantly, MARS introduces new research opportunities and challenges such as multitraversal 3D reconstruction, multiagent perception, and unsupervised object discovery. Our data and codes can be found at https://ai4ce.github.io/MARS/.
Read more6/14/2024
0
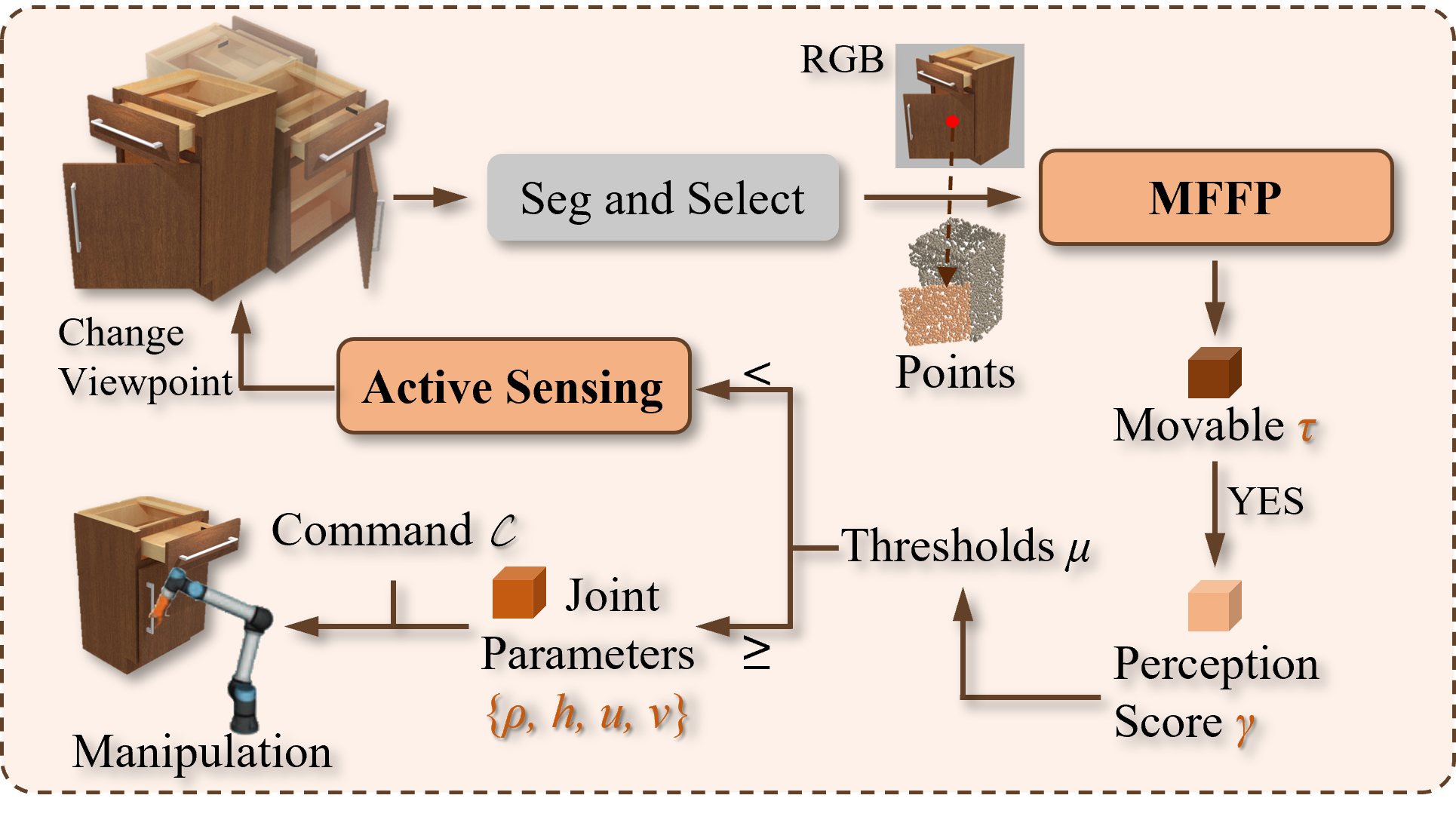
MARS: Multimodal Active Robotic Sensing for Articulated Characterization
Hongliang Zeng, Ping Zhang, Chengjiong Wu, Jiahua Wang, Tingyu Ye, Fang Li
Precise perception of articulated objects is vital for empowering service robots. Recent studies mainly focus on point cloud, a single-modal approach, often neglecting vital texture and lighting details and assuming ideal conditions like optimal viewpoints, unrepresentative of real-world scenarios. To address these limitations, we introduce MARS, a novel framework for articulated object characterization. It features a multi-modal fusion module utilizing multi-scale RGB features to enhance point cloud features, coupled with reinforcement learning-based active sensing for autonomous optimization of observation viewpoints. In experiments conducted with various articulated object instances from the PartNet-Mobility dataset, our method outperformed current state-of-the-art methods in joint parameter estimation accuracy. Additionally, through active sensing, MARS further reduces errors, demonstrating enhanced efficiency in handling suboptimal viewpoints. Furthermore, our method effectively generalizes to real-world articulated objects, enhancing robot interactions. Code is available at https://github.com/robhlzeng/MARS.
Read more7/2/2024
0
MAN TruckScenes: A multimodal dataset for autonomous trucking in diverse conditions
Felix Fent, Fabian Kuttenreich, Florian Ruch, Farija Rizwin, Stefan Juergens, Lorenz Lechermann, Christian Nissler, Andrea Perl, Ulrich Voll, Min Yan, Markus Lienkamp
Autonomous trucking is a promising technology that can greatly impact modern logistics and the environment. Ensuring its safety on public roads is one of the main duties that requires an accurate perception of the environment. To achieve this, machine learning methods rely on large datasets, but to this day, no such datasets are available for autonomous trucks. In this work, we present MAN TruckScenes, the first multimodal dataset for autonomous trucking. MAN TruckScenes allows the research community to come into contact with truck-specific challenges, such as trailer occlusions, novel sensor perspectives, and terminal environments for the first time. It comprises more than 740 scenes of 20 s each within a multitude of different environmental conditions. The sensor set includes 4 cameras, 6 lidar, 6 radar sensors, 2 IMUs, and a high-precision GNSS. The dataset's 3D bounding boxes were manually annotated and carefully reviewed to achieve a high quality standard. Bounding boxes are available for 27 object classes, 15 attributes, and a range of more than 230 m. The scenes are tagged according to 34 distinct scene tags, and all objects are tracked throughout the scene to promote a wide range of applications. Additionally, MAN TruckScenes is the first dataset to provide 4D radar data with 360{deg} coverage and is thereby the largest radar dataset with annotated 3D bounding boxes. Finally, we provide extensive dataset analysis and baseline results. The dataset, development kit and more are available online.
Read more7/11/2024
⛏️
0
MUSES: The Multi-Sensor Semantic Perception Dataset for Driving under Uncertainty
Tim Brodermann, David Bruggemann, Christos Sakaridis, Kevin Ta, Odysseas Liagouris, Jason Corkill, Luc Van Gool
Achieving level-5 driving automation in autonomous vehicles necessitates a robust semantic visual perception system capable of parsing data from different sensors across diverse conditions. However, existing semantic perception datasets often lack important non-camera modalities typically used in autonomous vehicles, or they do not exploit such modalities to aid and improve semantic annotations in challenging conditions. To address this, we introduce MUSES, the MUlti-SEnsor Semantic perception dataset for driving in adverse conditions under increased uncertainty. MUSES includes synchronized multimodal recordings with 2D panoptic annotations for 2500 images captured under diverse weather and illumination. The dataset integrates a frame camera, a lidar, a radar, an event camera, and an IMU/GNSS sensor. Our new two-stage panoptic annotation protocol captures both class-level and instance-level uncertainty in the ground truth and enables the novel task of uncertainty-aware panoptic segmentation we introduce, along with standard semantic and panoptic segmentation. MUSES proves both effective for training and challenging for evaluating models under diverse visual conditions, and it opens new avenues for research in multimodal and uncertainty-aware dense semantic perception. Our dataset and benchmark are publicly available at https://muses.vision.ee.ethz.ch.
Read more7/18/2024