Manifold Learning via Memory and Context

0

Sign in to get full access
Overview
- This paper proposes a novel manifold learning approach that leverages memory and contextual information to better capture the underlying structure of data.
- The authors introduce a "Toy Problem" to motivate their work and demonstrate the limitations of existing manifold learning techniques.
- The proposed method, called "Manifold Learning via Memory and Context" (MLMC), aims to address these limitations by incorporating memory and contextual information into the learning process.
- The authors evaluate MLMC on several benchmark datasets and show that it outperforms traditional manifold learning methods, particularly in capturing complex, non-linear structure.
Plain English Explanation
The paper is about a new way to learn the hidden structure, or "manifold," of data. Manifold learning is a technique used to understand the underlying geometry of high-dimensional data by finding a lower-dimensional representation that preserves the important relationships between the data points.
The authors start by introducing a simple "Toy Problem" that highlights the shortcomings of existing manifold learning methods. They explain that these methods struggle to capture the full complexity of the data, especially when it has a non-linear structure.
To address this issue, the authors propose a new approach called "Manifold Learning via Memory and Context" (MLMC). The key idea behind MLMC is to incorporate information about the "memory" and "context" of the data points into the learning process. By doing this, the method can better understand the intricate relationships between the data points and uncover the true underlying manifold.
The authors demonstrate the effectiveness of MLMC on several benchmark datasets, showing that it outperforms traditional manifold learning techniques, particularly when dealing with complex, non-linear data structures. This suggests that the incorporation of memory and contextual information can be a powerful way to improve our understanding of the hidden geometry of high-dimensional data.
Technical Explanation
The paper introduces a novel manifold learning approach called "Manifold Learning via Memory and Context" (MLMC) that leverages memory and contextual information to better capture the underlying structure of data.
The authors start by presenting a "Toy Problem" to motivate their work. They show that existing manifold learning techniques, such as Nonlinear Classification on Neural Manifolds with Contextual Information and MC-GPT: Empowering Vision-Language Navigation with Memory and Context, struggle to accurately model the non-linear structure of the data in this problem.
To address this limitation, the authors propose the MLMC framework, which incorporates both memory and contextual information into the manifold learning process. The memory component is inspired by work on Memoria: Resolving the Fateful Forgetting Problem through Human-like Episodic Memory and Human-like Episodic Memory for Infinite Context in Large Language Models, allowing the model to better remember and utilize information about past data points. The contextual information is leveraged to capture the complex, non-linear relationships between data points, as in the Neuromorphic Perception and Navigation for Mobile Robots: A Review approach.
The authors evaluate MLMC on several benchmark datasets and show that it outperforms traditional manifold learning methods, particularly in capturing the intricate structure of non-linear data. This suggests that the incorporation of memory and contextual information can be a powerful way to improve manifold learning and uncover the hidden geometry of high-dimensional data.
Critical Analysis
The paper presents a compelling approach to manifold learning that leverages memory and contextual information to better capture the underlying structure of complex, non-linear data. The authors' "Toy Problem" is a clear and effective demonstration of the limitations of existing techniques, and the MLMC framework they propose appears to be a promising solution.
One potential caveat is that the paper does not provide a detailed analysis of the computational complexity and scalability of the MLMC approach. As the authors note, the memory and context components may introduce additional computational overhead, which could be a concern for large-scale or real-time applications.
Additionally, the paper does not delve deeply into the specific mechanisms by which memory and context are incorporated into the manifold learning process. While the high-level ideas are well-explained, a more in-depth technical discussion of the model architecture and learning algorithms could be beneficial for readers interested in the technical details.
Another area for further research could be the robustness of MLMC to noisy or incomplete data, as well as its performance on a wider range of real-world datasets and applications. Exploring these aspects could help establish the broader applicability and practical significance of the proposed approach.
Conclusion
The "Manifold Learning via Memory and Context" (MLMC) framework presented in this paper represents a promising advancement in the field of manifold learning. By incorporating memory and contextual information into the learning process, the authors have demonstrated the ability to better capture the complex, non-linear structure of data, outperforming traditional manifold learning techniques.
The potential implications of this work are significant, as the ability to accurately model the underlying geometry of high-dimensional data has far-reaching applications in areas such as dimensionality reduction, visualization, and representation learning. The integration of memory and context-aware mechanisms could lead to more robust and informative manifold representations, with impacts spanning machine learning, data analysis, and beyond.
While the paper raises a few areas for further exploration, such as computational complexity and the specific technical details of the MLMC approach, the overall contribution is a valuable step forward in the ongoing effort to develop more powerful and versatile manifold learning techniques.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Manifold Learning via Memory and Context
Xin Li
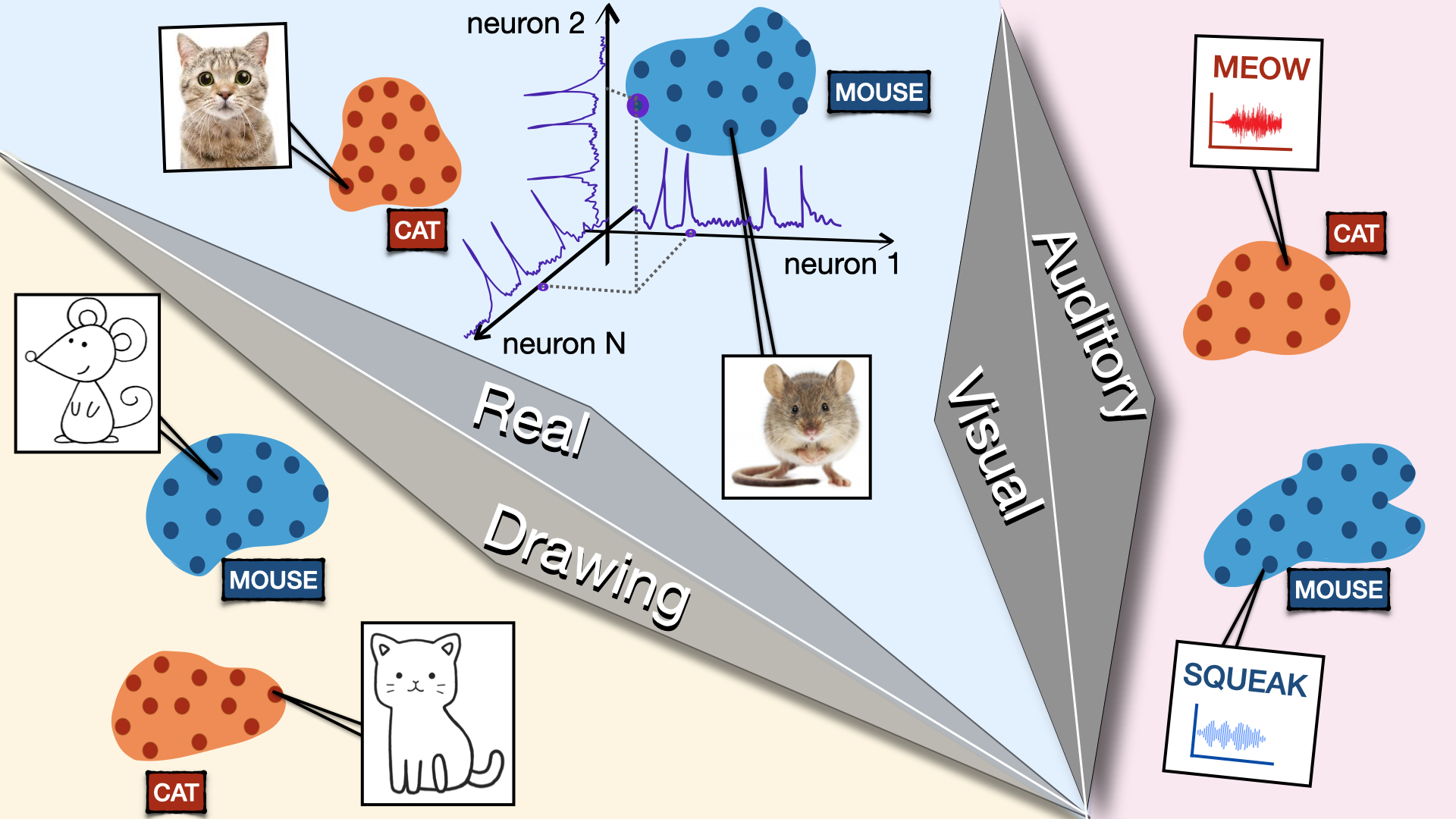
Given a memory with infinite capacity, can we solve the learning problem? Apparently, nature has solved this problem as evidenced by the evolution of mammalian brains. Inspired by the organizational principles underlying hippocampal-neocortical systems, we present a navigation-based approach to manifold learning using memory and context. The key insight is to navigate on the manifold and memorize the positions of each route as inductive/design bias of direct-fit-to-nature. We name it navigation-based because our approach can be interpreted as navigating in the latent space of sensorimotor learning via memory (local maps) and context (global indexing). The indexing to the library of local maps within global coordinates is collected by an associative memory serving as the librarian, which mimics the coupling between the hippocampus and the neocortex. In addition to breaking from the notorious bias-variance dilemma and the curse of dimensionality, we discuss the biological implementation of our navigation-based learning by episodic and semantic memories in neural systems. The energy efficiency of navigation-based learning makes it suitable for hardware implementation on non-von Neumann architectures, such as the emerging in-memory computing paradigm, including spiking neural networks and memristor neural networks.
Read more7/16/2024
0
Nonlinear classification of neural manifolds with contextual information
Francesca Mignacco, Chi-Ning Chou, SueYeon Chung
Understanding how neural systems efficiently process information through distributed representations is a fundamental challenge at the interface of neuroscience and machine learning. Recent approaches analyze the statistical and geometrical attributes of neural representations as population-level mechanistic descriptors of task implementation. In particular, manifold capacity has emerged as a promising framework linking population geometry to the separability of neural manifolds. However, this metric has been limited to linear readouts. Here, we propose a theoretical framework that overcomes this limitation by leveraging contextual input information. We derive an exact formula for the context-dependent capacity that depends on manifold geometry and context correlations, and validate it on synthetic and real data. Our framework's increased expressivity captures representation untanglement in deep networks at early stages of the layer hierarchy, previously inaccessible to analysis. As context-dependent nonlinearity is ubiquitous in neural systems, our data-driven and theoretically grounded approach promises to elucidate context-dependent computation across scales, datasets, and models.
Read more5/14/2024

0
MC-GPT: Empowering Vision-and-Language Navigation with Memory Map and Reasoning Chains
Zhaohuan Zhan, Lisha Yu, Sijie Yu, Guang Tan
In the Vision-and-Language Navigation (VLN) task, the agent is required to navigate to a destination following a natural language instruction. While learning-based approaches have been a major solution to the task, they suffer from high training costs and lack of interpretability. Recently, Large Language Models (LLMs) have emerged as a promising tool for VLN due to their strong generalization capabilities. However, existing LLM-based methods face limitations in memory construction and diversity of navigation strategies. To address these challenges, we propose a suite of techniques. Firstly, we introduce a method to maintain a topological map that stores navigation history, retaining information about viewpoints, objects, and their spatial relationships. This map also serves as a global action space. Additionally, we present a Navigation Chain of Thoughts module, leveraging human navigation examples to enrich navigation strategy diversity. Finally, we establish a pipeline that integrates navigational memory and strategies with perception and action prediction modules. Experimental results on the REVERIE and R2R datasets show that our method effectively enhances the navigation ability of the LLM and improves the interpretability of navigation reasoning.
Read more8/13/2024

0
Leveraging Knowledge Graph-Based Human-Like Memory Systems to Solve Partially Observable Markov Decision Processes
Taewoon Kim, Vincent Franc{c}ois-Lavet, Michael Cochez
Humans observe only part of their environment at any moment but can still make complex, long-term decisions thanks to our long-term memory. To test how an AI can learn and utilize its long-term memory, we have developed a partially observable Markov decision processes (POMDP) environment, where the agent has to answer questions while navigating a maze. The environment is completely knowledge graph (KG) based, where the hidden states are dynamic KGs. A KG is both human- and machine-readable, making it easy to see what the agents remember and forget. We train and compare agents with different memory systems, to shed light on how human brains work when it comes to managing its own memory. By repurposing the given learning objective as learning a memory management policy, we were able to capture the most likely hidden state, which is not only interpretable but also reusable.
Read more8/20/2024