Neuromorphic Perception and Navigation for Mobile Robots: A Review

0

Sign in to get full access
Overview
• This paper provides a comprehensive review of neuromorphic perception and navigation techniques for mobile robots.
• The review covers various bio-inspired processing methods and representations used in neuromorphic robotics, including event-based vision, spiking neural networks, and other neuromorphic approaches.
• The paper discusses the advantages of these neuromorphic techniques for tasks like obstacle avoidance, navigation, and manipulation, as well as the challenges and potential future directions in this rapidly evolving field.
Plain English Explanation
Neuromorphic robotics is an exciting field that aims to create robots that process information and make decisions more like the human brain. Instead of traditional computer vision and control systems, neuromorphic robots use event-based sensors and spiking neural networks inspired by biological neural circuits.
These neuromorphic approaches can offer advantages for tasks like navigation and obstacle avoidance, as they can react quickly to dynamic environments and operate efficiently with limited power. For example, neuromorphic navigation systems can use event-based vision to detect obstacles and plan paths in real-time, while neuromorphic manipulation systems can use spiking neural networks to control robotic arms and hands in a more natural, human-like way.
However, designing effective neuromorphic systems also presents unique challenges, such as training spiking neural networks and integrating different neuromorphic sensing and processing components. The paper reviews some of the latest developments and open questions in this rapidly evolving field, highlighting the potential for neuromorphic robotics to enable new levels of performance, efficiency, and autonomy for mobile robots.
Technical Explanation
The paper begins by discussing the key principles and advantages of neuromorphic perception and processing for mobile robots. Unlike traditional computer vision and control systems, neuromorphic approaches are inspired by the way the brain processes information using event-based sensors and spiking neural networks.
For example, event-based vision sensors can detect changes in the visual scene and transmit only the relevant information, rather than sending full image frames. This can enable faster reaction times and more efficient processing for tasks like obstacle avoidance and navigation. Similarly, spiking neural networks can perform complex computations using sparse, asynchronous firing of artificial neurons, potentially leading to more efficient and flexible control systems.
The paper then reviews various neuromorphic perception and processing techniques, including event-based vision, neuromorphic tactile sensing, and spiking neural network architectures. It discusses how these approaches have been applied to mobile robot tasks such as navigation, manipulation, and exploration, highlighting the unique capabilities and challenges of each method.
Critical Analysis
The paper provides a thorough and well-researched overview of the state of the art in neuromorphic perception and navigation for mobile robots. However, it also acknowledges several key challenges and limitations that must be addressed to realize the full potential of these technologies.
One significant challenge is the need for more efficient training and integration of spiking neural networks, which can be computationally demanding compared to traditional artificial neural networks. The paper suggests that advances in neuromorphic hardware, as well as novel training algorithms, will be crucial for deploying these systems in real-world robotic applications.
Additionally, the authors note that the lack of large-scale, standardized datasets and benchmarks for neuromorphic robotics can hinder progress in the field. Developing such resources would allow for more rigorous evaluation and comparison of different neuromorphic approaches, potentially accelerating their development and adoption.
The paper also highlights the importance of incorporating feedback and interaction between perception, cognition, and action in neuromorphic robotic systems, as this can better mirror the way biological systems operate. Achieving this level of embodied intelligence remains an ongoing challenge that will require further research and innovation.
Conclusion
This comprehensive review of neuromorphic perception and navigation for mobile robots highlights the significant potential of these bio-inspired approaches to enable new levels of performance, efficiency, and autonomy in robotic systems. By leveraging event-based sensing, spiking neural networks, and other neuromorphic techniques, researchers are working to create robots that can navigate and interact with their environments more like humans and animals.
However, the paper also underscores the technical and conceptual challenges that must be addressed to fully realize the promise of neuromorphic robotics. Continued advancements in areas such as spiking neural network training, neuromorphic hardware, and embodied intelligence will be crucial for translating these innovative ideas into practical, real-world robotic applications.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Neuromorphic Perception and Navigation for Mobile Robots: A Review
A. Novo, F. Lobon, H. G. De Marina, S. Romero, F. Barranco
With the fast and unstoppable evolution of robotics and artificial intelligence, effective autonomous navigation in real-world scenarios has become one of the most pressing challenges in the literature. However, demanding requirements, such as real-time operation, energy and computational efficiency, robustness, and reliability, make most current solutions unsuitable for real-world challenges. Thus, researchers are forced to seek innovative approaches, such as bio-inspired solutions. Indeed, animals have the intrinsic ability to efficiently perceive, understand, and navigate their unstructured surroundings. To do so, they exploit self-motion cues, proprioception, and visual flow in a cognitive process to map their environment and locate themselves within it. Computational neuroscientists aim to answer ''how'' and ''why'' such cognitive processes occur in the brain, to design novel neuromorphic sensors and methods that imitate biological processing. This survey aims to comprehensively review the application of brain-inspired strategies to autonomous navigation, considering: neuromorphic perception and asynchronous event processing, energy-efficient and adaptive learning, or the imitation of the working principles of brain areas that play a crucial role in navigation such as the hippocampus or the entorhinal cortex.
Read more7/10/2024

0
A Neuromorphic Approach to Obstacle Avoidance in Robot Manipulation
Ahmed Faisal Abdelrahman, Matias Valdenegro-Toro, Maren Bennewitz, Paul G. Ploger
Neuromorphic computing mimics computational principles of the brain in $textit{silico}$ and motivates research into event-based vision and spiking neural networks (SNNs). Event cameras (ECs) exclusively capture local intensity changes and offer superior power consumption, response latencies, and dynamic ranges. SNNs replicate biological neuronal dynamics and have demonstrated potential as alternatives to conventional artificial neural networks (ANNs), such as in reducing energy expenditure and inference time in visual classification. Nevertheless, these novel paradigms remain scarcely explored outside the domain of aerial robots. To investigate the utility of brain-inspired sensing and data processing, we developed a neuromorphic approach to obstacle avoidance on a camera-equipped manipulator. Our approach adapts high-level trajectory plans with reactive maneuvers by processing emulated event data in a convolutional SNN, decoding neural activations into avoidance motions, and adjusting plans using a dynamic motion primitive. We conducted experiments with a Kinova Gen3 arm performing simple reaching tasks that involve obstacles in sets of distinct task scenarios and in comparison to a non-adaptive baseline. Our neuromorphic approach facilitated reliable avoidance of imminent collisions in simulated and real-world experiments, where the baseline consistently failed. Trajectory adaptations had low impacts on safety and predictability criteria. Among the notable SNN properties were the correlation of computations with the magnitude of perceived motions and a robustness to different event emulation methods. Tests with a DAVIS346 EC showed similar performance, validating our experimental event emulation. Our results motivate incorporating SNN learning, utilizing neuromorphic processors, and further exploring the potential of neuromorphic methods.
Read more4/10/2024
0
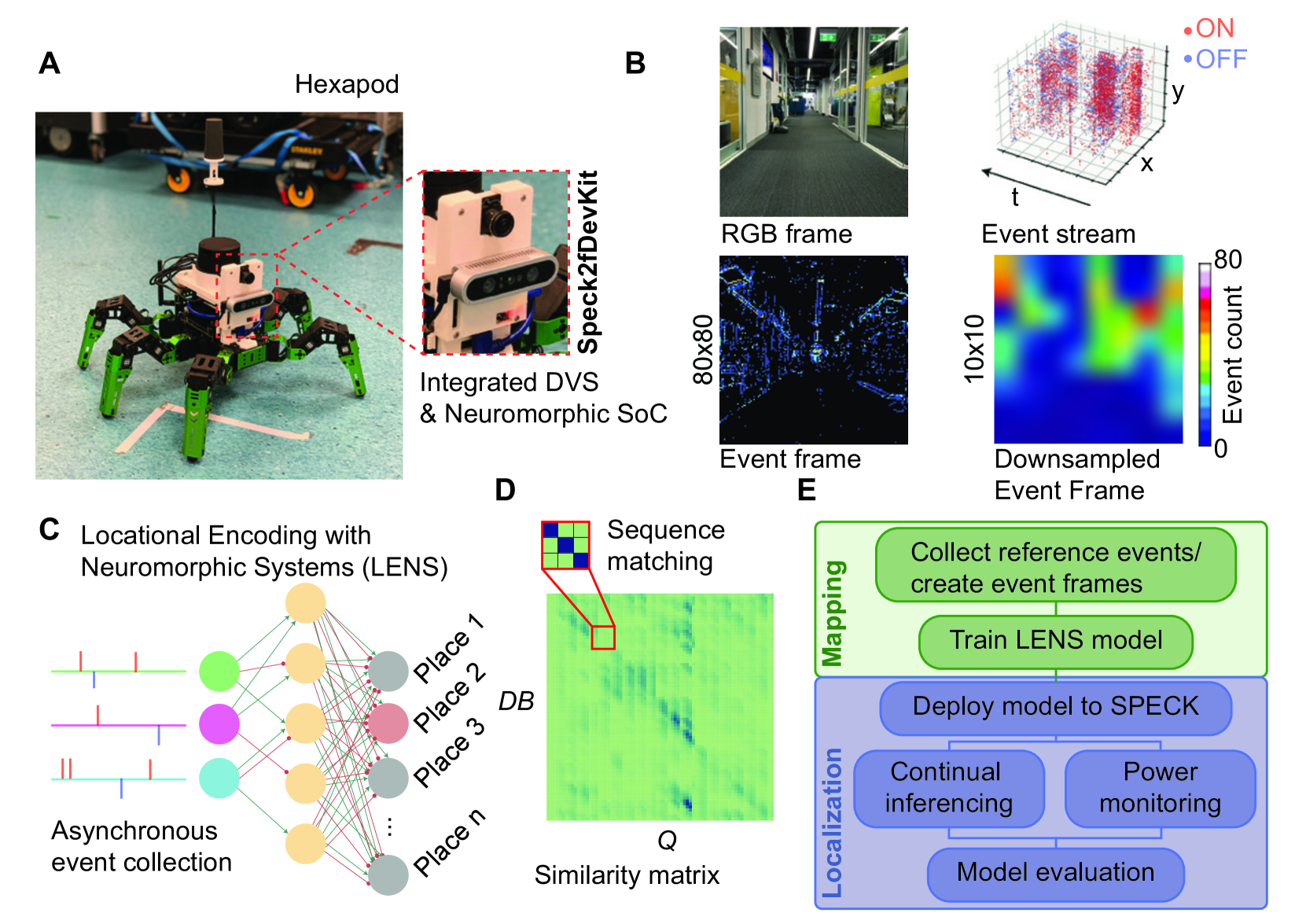
A compact neuromorphic system for ultra energy-efficient, on-device robot localization
Adam D. Hines, Michael Milford, Tobias Fischer
Neuromorphic computing offers a transformative pathway to overcome the computational and energy challenges faced in deploying robotic localization and navigation systems at the edge. Visual place recognition, a critical component for navigation, is often hampered by the high resource demands of conventional systems, making them unsuitable for small-scale robotic platforms which still require to perform complex, long-range tasks. Although neuromorphic approaches offer potential for greater efficiency, real-time edge deployment remains constrained by the complexity and limited scalability of bio-realistic networks. Here, we demonstrate a neuromorphic localization system that performs accurate place recognition in up to 8km of traversal using models as small as 180 KB with 44k parameters, while consuming less than 1% of the energy required by conventional methods. Our Locational Encoding with Neuromorphic Systems (LENS) integrates spiking neural networks, an event-based dynamic vision sensor, and a neuromorphic processor within a single SPECK(TM) chip, enabling real-time, energy-efficient localization on a hexapod robot. LENS represents the first fully neuromorphic localization system capable of large-scale, on-device deployment, setting a new benchmark for energy efficient robotic place recognition.
Read more8/30/2024
0
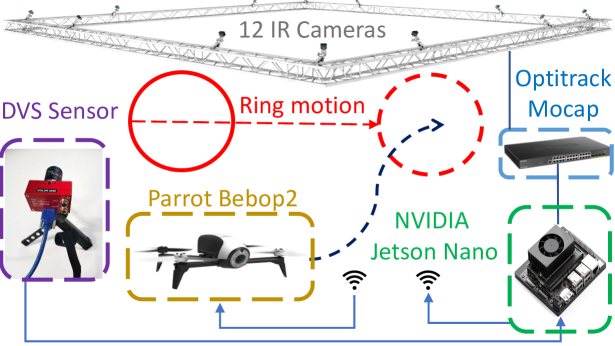
Real-Time Neuromorphic Navigation: Integrating Event-Based Vision and Physics-Driven Planning on a Parrot Bebop2 Quadrotor
Amogh Joshi, Sourav Sanyal, Kaushik Roy
In autonomous aerial navigation, real-time and energy-efficient obstacle avoidance remains a significant challenge, especially in dynamic and complex indoor environments. This work presents a novel integration of neuromorphic event cameras with physics-driven planning algorithms implemented on a Parrot Bebop2 quadrotor. Neuromorphic event cameras, characterized by their high dynamic range and low latency, offer significant advantages over traditional frame-based systems, particularly in poor lighting conditions or during high-speed maneuvers. We use a DVS camera with a shallow Spiking Neural Network (SNN) for event-based object detection of a moving ring in real-time in an indoor lab. Further, we enhance drone control with physics-guided empirical knowledge inside a neural network training mechanism, to predict energy-efficient flight paths to fly through the moving ring. This integration results in a real-time, low-latency navigation system capable of dynamically responding to environmental changes while minimizing energy consumption. We detail our hardware setup, control loop, and modifications necessary for real-world applications, including the challenges of sensor integration without burdening the flight capabilities. Experimental results demonstrate the effectiveness of our approach in achieving robust, collision-free, and energy-efficient flight paths, showcasing the potential of neuromorphic vision and physics-driven planning in enhancing autonomous navigation systems.
Read more7/2/2024