ManiFoundation Model for General-Purpose Robotic Manipulation of Contact Synthesis with Arbitrary Objects and Robots
2405.06964
0
0
📈
Abstract
To substantially enhance robot intelligence, there is a pressing need to develop a large model that enables general-purpose robots to proficiently undertake a broad spectrum of manipulation tasks, akin to the versatile task-planning ability exhibited by LLMs. The vast diversity in objects, robots, and manipulation tasks presents huge challenges. Our work introduces a comprehensive framework to develop a foundation model for general robotic manipulation that formalizes a manipulation task as contact synthesis. Specifically, our model takes as input object and robot manipulator point clouds, object physical attributes, target motions, and manipulation region masks. It outputs contact points on the object and associated contact forces or post-contact motions for robots to achieve the desired manipulation task. We perform extensive experiments both in the simulation and real-world settings, manipulating articulated rigid objects, rigid objects, and deformable objects that vary in dimensionality, ranging from one-dimensional objects like ropes to two-dimensional objects like cloth and extending to three-dimensional objects such as plasticine. Our model achieves average success rates of around 90%. Supplementary materials and videos are available on our project website at https://manifoundationmodel.github.io/.
Create account to get full access
Overview
- Developing a large, general-purpose model for robotic manipulation tasks, similar to the versatile task-planning abilities of large language models (LLMs)
- Formulating manipulation tasks as "contact synthesis" - taking in object/robot point clouds, physical attributes, target motions, and manipulation regions to output contact points and forces/motions for robots to achieve desired tasks
- Extensive testing in simulation and real-world settings, including articulated, rigid, and deformable objects of varying dimensions
Plain English Explanation
To significantly improve robot intelligence, researchers aim to create a powerful, general-purpose robotic manipulation model. This model would allow robots to perform a wide variety of hands-on tasks, similar to how large language models can handle diverse text-based tasks.
The key challenge is that the world is filled with an enormous variety of objects, robots, and manipulation tasks. This diversity makes it difficult to develop a single, flexible model that can handle it all. The researchers address this by formalizing manipulation as "contact synthesis". Their model takes in information about the objects, robots, target motions, and manipulation regions, and outputs the specific contact points and forces/motions the robot should use to complete the desired task.
The researchers extensively test their model in simulations and real-world settings, with objects ranging from simple one-dimensional ropes to complex three-dimensional plasticine. Their model achieves impressive success rates of around 90% across these diverse manipulation tasks.
Technical Explanation
The core of the researchers' approach is to formalize robotic manipulation as "contact synthesis". Their model takes in a variety of inputs, including:
- 3D point clouds of the objects and robot manipulators
- Physical attributes of the objects, like mass and friction
- The desired target motions for the manipulation task
- Segmentation masks indicating the regions where manipulation should occur
From these inputs, the model outputs the specific contact points on the object and the associated contact forces or post-contact motions that the robot should use to achieve the desired manipulation outcome.
The researchers extensively evaluate their model in both simulated and real-world settings, testing it on a wide range of objects with different properties and dimensionalities - from 1D ropes to 2D cloth to 3D plasticine. Across these diverse tasks, their model achieves average success rates around 90%.
Critical Analysis
The researchers acknowledge several limitations and areas for future work. For example, their model currently assumes known object properties and manipulation regions, which may not always be available in real-world scenarios. Extending the model to handle more uncertainty and incomplete information could further improve its real-world applicability.
Additionally, while the model performs well on the tested tasks, its generalization to entirely novel objects and manipulation challenges remains an open question. Continued research is needed to enhance the model's ability to flexibly adapt to a truly open-ended range of manipulation problems.
Overall, the researchers' work represents an important step toward developing general-purpose robotic manipulation capabilities. By formalizing the problem as contact synthesis, they have created a powerful framework that can handle a diverse set of manipulation tasks. However, further advancements will be needed to fully realize the vision of highly versatile, human-level robotic intelligence.
Conclusion
This research introduces a comprehensive framework for developing a foundation model for general robotic manipulation. By formulating manipulation as contact synthesis, the model can handle a broad spectrum of tasks involving articulated, rigid, and deformable objects. Extensive testing demonstrates the model's strong performance, with average success rates around 90%.
While the model has limitations and further work is needed, this research represents an important step toward more versatile and capable robotic systems. Advancements in this direction could unlock a wide range of applications, from assistive robotics to industrial automation, with significant societal impact.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
🌿
What Foundation Models can Bring for Robot Learning in Manipulation : A Survey
Dingzhe Li, Yixiang Jin, Yong A, Hongze Yu, Jun Shi, Xiaoshuai Hao, Peng Hao, Huaping Liu, Fuchun Sun, Bin Fang
0
0
The realization of universal robots is an ultimate goal of researchers. However, a key hurdle in achieving this goal lies in the robots' ability to manipulate objects in their unstructured surrounding environments according to different tasks. The learning-based approach is considered an effective way to address generalization. The impressive performance of foundation models in the fields of computer vision and natural language suggests the potential of embedding foundation models into manipulation tasks as a viable path toward achieving general manipulation capability. However, we believe achieving general manipulation capability requires an overarching framework akin to auto driving. This framework should encompass multiple functional modules, with different foundation models assuming distinct roles in facilitating general manipulation capability. This survey focuses on the contributions of foundation models to robot learning for manipulation. We propose a comprehensive framework and detail how foundation models can address challenges in each module of the framework. What's more, we examine current approaches, outline challenges, suggest future research directions, and identify potential risks associated with integrating foundation models into this domain.
4/30/2024
Towards Natural Language-Driven Assembly Using Foundation Models
Omkar Joglekar, Tal Lancewicki, Shir Kozlovsky, Vladimir Tchuiev, Zohar Feldman, Dotan Di Castro
0
0
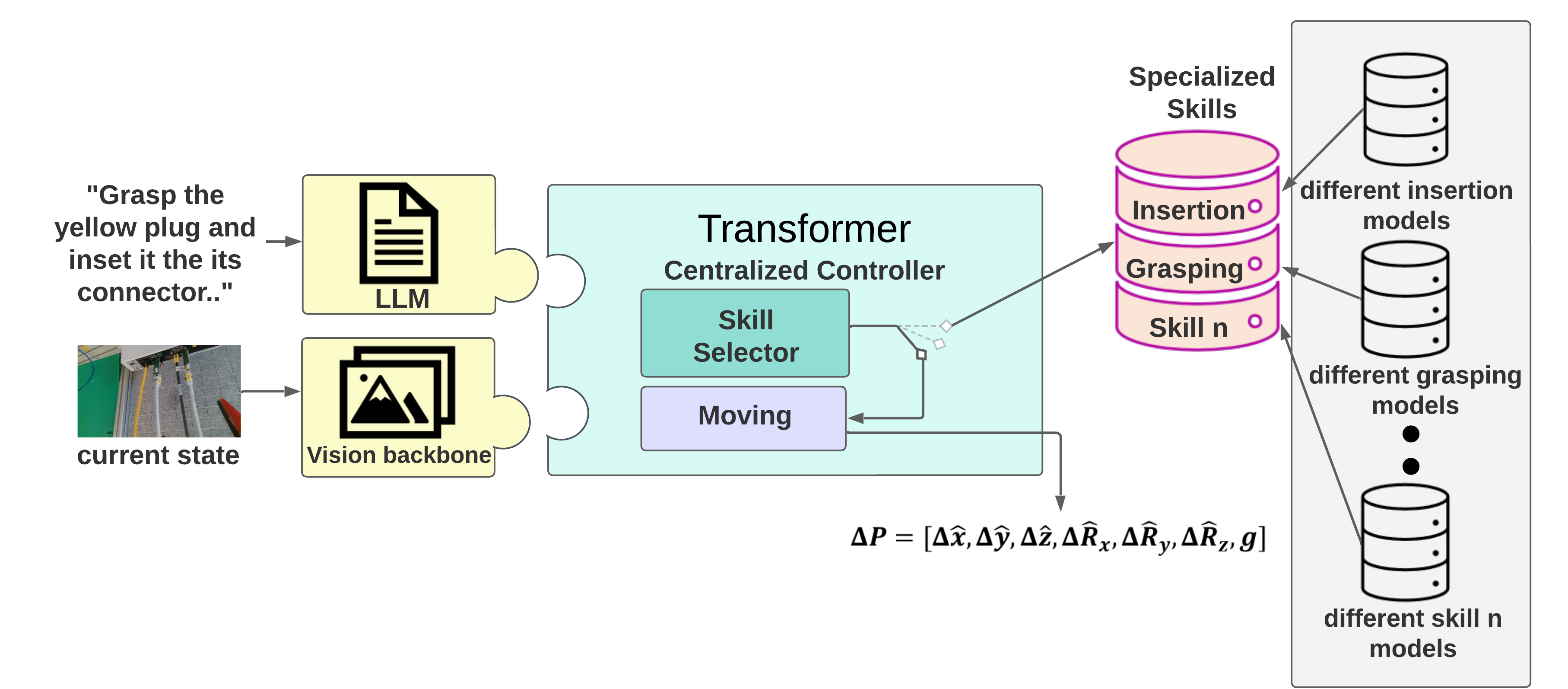
Large Language Models (LLMs) and strong vision models have enabled rapid research and development in the field of Vision-Language-Action models that enable robotic control. The main objective of these methods is to develop a generalist policy that can control robots with various embodiments. However, in industrial robotic applications such as automated assembly and disassembly, some tasks, such as insertion, demand greater accuracy and involve intricate factors like contact engagement, friction handling, and refined motor skills. Implementing these skills using a generalist policy is challenging because these policies might integrate further sensory data, including force or torque measurements, for enhanced precision. In our method, we present a global control policy based on LLMs that can transfer the control policy to a finite set of skills that are specifically trained to perform high-precision tasks through dynamic context switching. The integration of LLMs into this framework underscores their significance in not only interpreting and processing language inputs but also in enriching the control mechanisms for diverse and intricate robotic operations.
6/26/2024

Manipulate-Anything: Automating Real-World Robots using Vision-Language Models
Jiafei Duan, Wentao Yuan, Wilbert Pumacay, Yi Ru Wang, Kiana Ehsani, Dieter Fox, Ranjay Krishna
0
0
Large-scale endeavors like RT-1 and widespread community efforts such as Open-X-Embodiment have contributed to growing the scale of robot demonstration data. However, there is still an opportunity to improve the quality, quantity, and diversity of robot demonstration data. Although vision-language models have been shown to automatically generate demonstration data, their utility has been limited to environments with privileged state information, they require hand-designed skills, and are limited to interactions with few object instances. We propose Manipulate-Anything, a scalable automated generation method for real-world robotic manipulation. Unlike prior work, our method can operate in real-world environments without any privileged state information, hand-designed skills, and can manipulate any static object. We evaluate our method using two setups. First, Manipulate-Anything successfully generates trajectories for all 5 real-world and 12 simulation tasks, significantly outperforming existing methods like VoxPoser. Second, Manipulate-Anything's demonstrations can train more robust behavior cloning policies than training with human demonstrations, or from data generated by VoxPoser and Code-As-Policies. We believe Manipulate-Anything can be the scalable method for both generating data for robotics and solving novel tasks in a zero-shot setting.
7/1/2024
📈
Contact Models in Robotics: a Comparative Analysis
Quentin Le Lidec, Wilson Jallet, Louis Montaut, Ivan Laptev, Cordelia Schmid, Justin Carpentier
0
0
Physics simulation is ubiquitous in robotics. Whether in model-based approaches (e.g., trajectory optimization), or model-free algorithms (e.g., reinforcement learning), physics simulators are a central component of modern control pipelines in robotics. Over the past decades, several robotic simulators have been developed, each with dedicated contact modeling assumptions and algorithmic solutions. In this article, we survey the main contact models and the associated numerical methods commonly used in robotics for simulating advanced robot motions involving contact interactions. In particular, we recall the physical laws underlying contacts and friction (i.e., Signorini condition, Coulomb's law, and the maximum dissipation principle), and how they are transcribed in current simulators. For each physics engine, we expose their inherent physical relaxations along with their limitations due to the numerical techniques employed. Based on our study, we propose theoretically grounded quantitative criteria on which we build benchmarks assessing both the physical and computational aspects of simulation. We support our work with an open-source and efficient C++ implementation of the existing algorithmic variations. Our results demonstrate that some approximations or algorithms commonly used in robotics can severely widen the reality gap and impact target applications. We hope this work will help motivate the development of new contact models, contact solvers, and robotic simulators in general, at the root of recent progress in motion generation in robotics.
6/24/2024