Towards Natural Language-Driven Assembly Using Foundation Models
2406.16093
0
0
Abstract
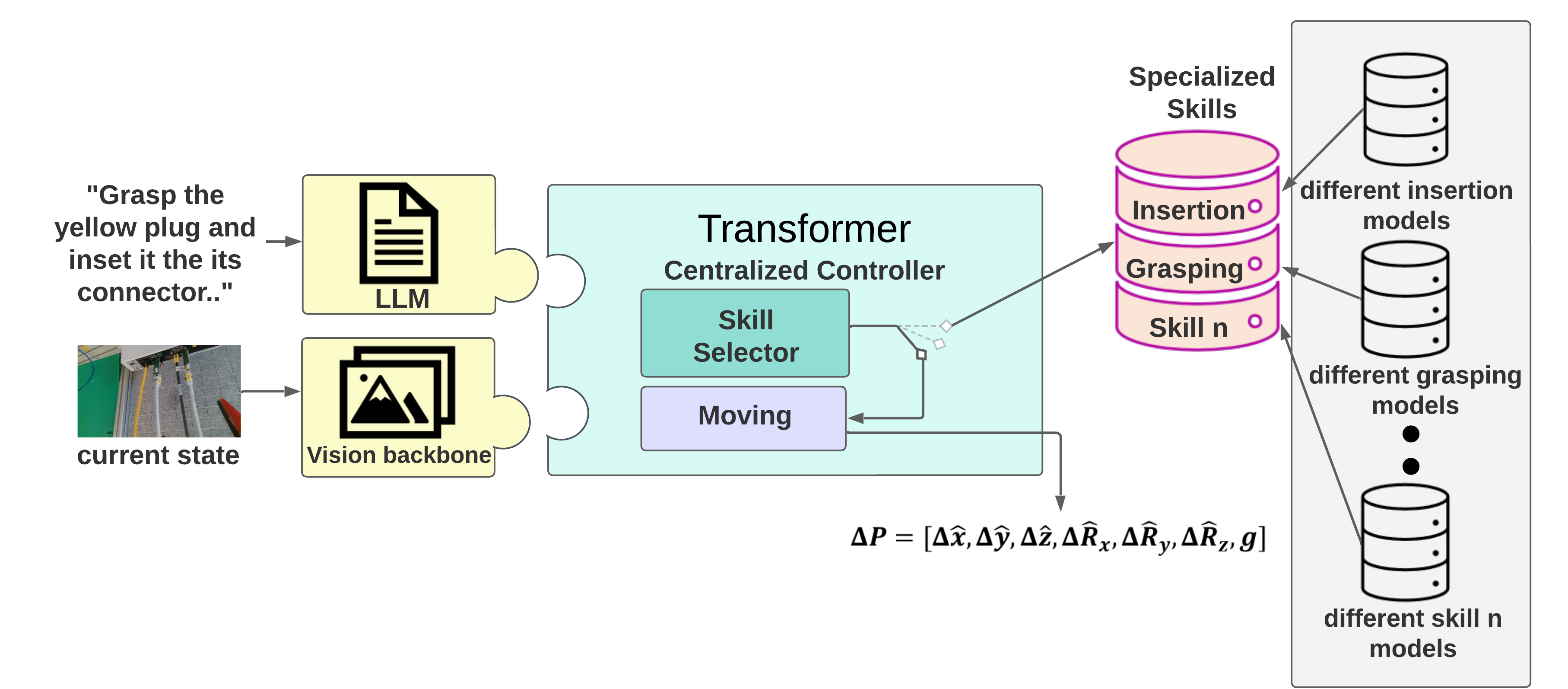
Large Language Models (LLMs) and strong vision models have enabled rapid research and development in the field of Vision-Language-Action models that enable robotic control. The main objective of these methods is to develop a generalist policy that can control robots with various embodiments. However, in industrial robotic applications such as automated assembly and disassembly, some tasks, such as insertion, demand greater accuracy and involve intricate factors like contact engagement, friction handling, and refined motor skills. Implementing these skills using a generalist policy is challenging because these policies might integrate further sensory data, including force or torque measurements, for enhanced precision. In our method, we present a global control policy based on LLMs that can transfer the control policy to a finite set of skills that are specifically trained to perform high-precision tasks through dynamic context switching. The integration of LLMs into this framework underscores their significance in not only interpreting and processing language inputs but also in enriching the control mechanisms for diverse and intricate robotic operations.
Create account to get full access
Overview
- This paper explores the use of large language models (LLMs) to enable natural language-driven industrial assembly, allowing workers to give instructions in plain language rather than relying on specialized programming skills.
- The researchers developed a system that can translate natural language commands into sequences of robotic actions, enabling more intuitive and accessible industrial automation.
- The proposed approach has the potential to make industrial assembly processes more efficient, flexible, and inclusive by lowering the barrier to entry for workers.
Plain English Explanation
The paper focuses on using advanced AI language models, known as large language models (LLMs), to make industrial assembly tasks more natural and accessible for workers.
Today, industrial robots are typically programmed using complex coding languages that require specialized technical skills. This can make it challenging for many workers to participate in and contribute to the assembly process. The paper on enhancing human-robot collaborative assembly in manufacturing systems explores this issue in more detail.
The researchers in this study wanted to explore a more intuitive approach, where workers could simply give instructions to the robots in plain, everyday language. They developed a system that can translate these natural language commands into the precise sequences of robotic actions needed to carry out the assembly tasks.
This has the potential to make industrial automation more flexible and inclusive, as workers with diverse backgrounds and skill levels could participate more easily. The paper on generating robot policy code with high precision discusses similar efforts to bridge the gap between human language and robotic control.
Additionally, the use of LLMs, which are trained on vast amounts of text data, allows the system to understand and respond to a wide range of natural language inputs. This could enable more dynamic and adaptable assembly workflows, where workers can provide real-time feedback and adjustments in their own words.
Technical Explanation
The researchers developed a system that leverages large language models (LLMs) to translate natural language instructions into sequences of robotic actions for industrial assembly tasks.
The key components of their approach include:
-
Language Understanding: They use an LLM, such as GPT-3, to process the natural language commands provided by workers and extract the relevant semantic information and task-level instructions.
-
Action Planning: Based on the extracted information, the system then plans the sequence of robotic actions needed to fulfill the assembly task. This involves mapping the high-level language commands to low-level robotic control primitives.
-
Robotic Execution: The planned robotic actions are then executed by the industrial manipulator to carry out the assembly process.
The researchers evaluated their system on several industrial assembly benchmarks, demonstrating its ability to understand a wide range of natural language instructions and accurately translate them into precise robotic behaviors. The paper on LLM-based robot task planning for exceptional handling explores similar techniques for translating language to robot actions.
Their results suggest that this approach can make industrial automation more accessible and adaptable, enabling workers to provide input and make adjustments using natural language rather than specialized programming skills.
Critical Analysis
The researchers acknowledge several limitations and areas for future work in their paper:
-
Robustness and Reliability: While the system demonstrated promising performance on the evaluated benchmarks, its robustness and reliability in real-world industrial settings with complex, dynamic environments and diverse worker inputs remain to be thoroughly tested and validated.
-
Safety and Oversight: The researchers emphasize the importance of maintaining appropriate human oversight and safety protocols when deploying such language-driven robotic systems in industrial settings, where safety is of paramount concern.
-
Generalization and Scalability: The paper focuses on a specific set of assembly tasks and language constructs. Further research is needed to understand how well the approach can generalize to a wider range of industrial applications and handle increasingly complex language inputs.
-
Ethical Considerations: As with any technology that has the potential to disrupt existing workflows and processes, the researchers should carefully consider the social and ethical implications of this work, such as potential job displacement and the need to ensure inclusive and equitable access to the benefits of this technology.
The paper on survey integration of large language models and intelligent robots provides a broader perspective on the challenges and opportunities in this field.
Conclusion
This paper presents a promising approach for enabling natural language-driven industrial assembly using large language models. By allowing workers to provide instructions in plain language, the proposed system has the potential to make industrial automation more accessible, flexible, and inclusive.
While further research is needed to address the identified limitations and scale the technology to real-world industrial settings, this work represents an important step towards bridging the gap between human language and robotic control. If successfully deployed, such language-driven industrial assembly systems could contribute to more efficient, adaptable, and collaborative manufacturing processes.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
💬
A Survey on Integration of Large Language Models with Intelligent Robots
Yeseung Kim, Dohyun Kim, Jieun Choi, Jisang Park, Nayoung Oh, Daehyung Park
0
0
In recent years, the integration of large language models (LLMs) has revolutionized the field of robotics, enabling robots to communicate, understand, and reason with human-like proficiency. This paper explores the multifaceted impact of LLMs on robotics, addressing key challenges and opportunities for leveraging these models across various domains. By categorizing and analyzing LLM applications within core robotics elements -- communication, perception, planning, and control -- we aim to provide actionable insights for researchers seeking to integrate LLMs into their robotic systems. Our investigation focuses on LLMs developed post-GPT-3.5, primarily in text-based modalities while also considering multimodal approaches for perception and control. We offer comprehensive guidelines and examples for prompt engineering, facilitating beginners' access to LLM-based robotics solutions. Through tutorial-level examples and structured prompt construction, we illustrate how LLM-guided enhancements can be seamlessly integrated into robotics applications. This survey serves as a roadmap for researchers navigating the evolving landscape of LLM-driven robotics, offering a comprehensive overview and practical guidance for harnessing the power of language models in robotics development.
6/26/2024
Enhancing Human-Robot Collaborative Assembly in Manufacturing Systems Using Large Language Models
Jonghan Lim, Sujani Patel, Alex Evans, John Pimley, Yifei Li, Ilya Kovalenko
0
0
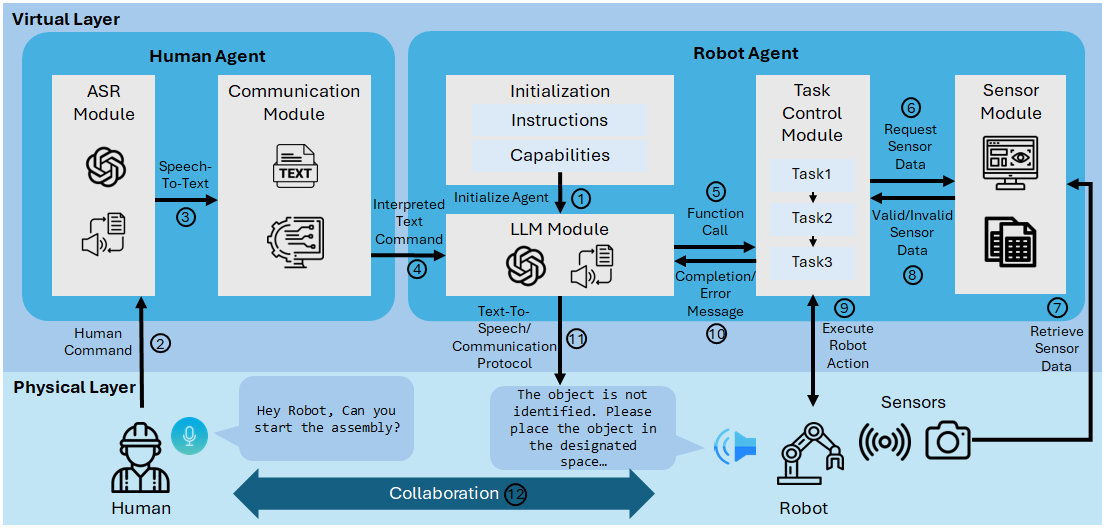
The development of human-robot collaboration has the ability to improve manufacturing system performance by leveraging the unique strengths of both humans and robots. On the shop floor, human operators contribute with their adaptability and flexibility in dynamic situations, while robots provide precision and the ability to perform repetitive tasks. However, the communication gap between human operators and robots limits the collaboration and coordination of human-robot teams in manufacturing systems. Our research presents a human-robot collaborative assembly framework that utilizes a large language model for enhancing communication in manufacturing environments. The framework facilitates human-robot communication by integrating voice commands through natural language for task management. A case study for an assembly task demonstrates the framework's ability to process natural language inputs and address real-time assembly challenges, emphasizing adaptability to language variation and efficiency in error resolution. The results suggest that large language models have the potential to improve human-robot interaction for collaborative manufacturing assembly applications.
6/24/2024

LLM-based Robot Task Planning with Exceptional Handling for General Purpose Service Robots
Ruoyu Wang, Zhipeng Yang, Zinan Zhao, Xinyan Tong, Zhi Hong, Kun Qian
0
0
The development of a general purpose service robot for daily life necessitates the robot's ability to deploy a myriad of fundamental behaviors judiciously. Recent advancements in training Large Language Models (LLMs) can be used to generate action sequences directly, given an instruction in natural language with no additional domain information. However, while the outputs of LLMs are semantically correct, the generated task plans may not accurately map to acceptable actions and might encompass various linguistic ambiguities. LLM hallucinations pose another challenge for robot task planning, which results in content that is inconsistent with real-world facts or user inputs. In this paper, we propose a task planning method based on a constrained LLM prompt scheme, which can generate an executable action sequence from a command. An exceptional handling module is further proposed to deal with LLM hallucinations problem. This module can ensure the LLM-generated results are admissible in the current environment. We evaluate our method on the commands generated by the RoboCup@Home Command Generator, observing that the robot demonstrates exceptional performance in both comprehending instructions and executing tasks.
5/27/2024

GenCHiP: Generating Robot Policy Code for High-Precision and Contact-Rich Manipulation Tasks
Kaylee Burns, Ajinkya Jain, Keegan Go, Fei Xia, Michael Stark, Stefan Schaal, Karol Hausman
0
0
Large Language Models (LLMs) have been successful at generating robot policy code, but so far these results have been limited to high-level tasks that do not require precise movement. It is an open question how well such approaches work for tasks that require reasoning over contact forces and working within tight success tolerances. We find that, with the right action space, LLMs are capable of successfully generating policies for a variety of contact-rich and high-precision manipulation tasks, even under noisy conditions, such as perceptual errors or grasping inaccuracies. Specifically, we reparameterize the action space to include compliance with constraints on the interaction forces and stiffnesses involved in reaching a target pose. We validate this approach on subtasks derived from the Functional Manipulation Benchmark (FMB) and NIST Task Board Benchmarks. Exposing this action space alongside methods for estimating object poses improves policy generation with an LLM by greater than 3x and 4x when compared to non-compliant action spaces
4/11/2024