What Foundation Models can Bring for Robot Learning in Manipulation : A Survey
2404.18201
0
0
🌿
Abstract
The realization of universal robots is an ultimate goal of researchers. However, a key hurdle in achieving this goal lies in the robots' ability to manipulate objects in their unstructured surrounding environments according to different tasks. The learning-based approach is considered an effective way to address generalization. The impressive performance of foundation models in the fields of computer vision and natural language suggests the potential of embedding foundation models into manipulation tasks as a viable path toward achieving general manipulation capability. However, we believe achieving general manipulation capability requires an overarching framework akin to auto driving. This framework should encompass multiple functional modules, with different foundation models assuming distinct roles in facilitating general manipulation capability. This survey focuses on the contributions of foundation models to robot learning for manipulation. We propose a comprehensive framework and detail how foundation models can address challenges in each module of the framework. What's more, we examine current approaches, outline challenges, suggest future research directions, and identify potential risks associated with integrating foundation models into this domain.
Create account to get full access
Overview
- Researchers aim to create universal robots that can manipulate objects in unstructured environments for different tasks
- A key challenge is enabling robots to generalize their manipulation skills
- The paper explores using foundation models, powerful AI models trained on vast datasets, as a path to achieving general manipulation capabilities
- The authors propose a comprehensive framework for integrating foundation models into robot learning for manipulation tasks
Plain English Explanation
The ultimate goal for robot researchers is to create universal robots - robots that can adapt and perform a wide variety of tasks in messy, unpredictable environments. However, teaching robots to manipulate objects in these unstructured settings is a major hurdle.
The researchers believe that foundation models, powerful AI models trained on huge datasets, could be the key to helping robots generalize their manipulation skills. Much like how foundation models have revolutionized fields like computer vision and natural language processing, the authors think embedding them into robot control could be a viable path to achieving general manipulation capabilities.
But the researchers argue that realizing this vision requires an overarching framework, akin to self-driving car systems, that integrates multiple specialized foundation models to tackle the various challenges of general manipulation. This paper lays out that comprehensive framework and explores how different foundation models could address the hurdles in each component.
Technical Explanation
The paper proposes a holistic framework for incorporating foundation models into robot learning for manipulation tasks. This framework encompasses several functional modules, including:
- Perception - Using foundation models to interpret the robot's surroundings and detect relevant objects
- Reasoning - Leveraging foundation models to reason about the state of the environment and plan manipulation actions
- Control - Employing foundation models to execute fine-grained control of the robot's movements
The authors analyze how different types of foundation models could be tailored to address the unique challenges within each module. For instance, they discuss using visually-trained foundation models for perception, language models for reasoning, and dynamics models for control.
Additionally, the paper examines current approaches, outlines remaining challenges, suggests future research directions, and identifies potential risks associated with integrating foundation models into robot manipulation.
Critical Analysis
The researchers make a compelling case for using foundation models as a promising path toward general robot manipulation capabilities. However, the authors acknowledge that significant technical hurdles remain. Integrating multiple specialized foundation models into a cohesive framework and ensuring robust, safe, and reliable performance in unstructured environments are major challenges that require further research.
Additionally, the paper does not delve into the ethical implications of deploying foundation model-powered robots in the real world. Issues around privacy, transparency, and potential misuse will need to be carefully considered as this technology advances.
Overall, the framework proposed in this paper provides a useful roadmap for the field, but much work is still needed to translate the potential of foundation models into practical, general-purpose robot manipulation systems.
Conclusion
This paper outlines a comprehensive framework for leveraging foundation models to advance the state-of-the-art in robot manipulation. By embedding different types of foundation models into key functional modules like perception, reasoning, and control, the researchers believe robots can be imbued with the generalization capabilities needed to thrive in unstructured environments.
While significant technical and ethical challenges remain, the authors make a compelling case that foundation models represent a promising path toward the long-standing goal of creating versatile, universal robots. This research provides a valuable blueprint for future work in this exciting and impactful area of robotics.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
📈
ManiFoundation Model for General-Purpose Robotic Manipulation of Contact Synthesis with Arbitrary Objects and Robots
Zhixuan Xu, Chongkai Gao, Zixuan Liu, Gang Yang, Chenrui Tie, Haozhuo Zheng, Haoyu Zhou, Weikun Peng, Debang Wang, Tianyi Chen, Zhouliang Yu, Lin Shao
0
0
To substantially enhance robot intelligence, there is a pressing need to develop a large model that enables general-purpose robots to proficiently undertake a broad spectrum of manipulation tasks, akin to the versatile task-planning ability exhibited by LLMs. The vast diversity in objects, robots, and manipulation tasks presents huge challenges. Our work introduces a comprehensive framework to develop a foundation model for general robotic manipulation that formalizes a manipulation task as contact synthesis. Specifically, our model takes as input object and robot manipulator point clouds, object physical attributes, target motions, and manipulation region masks. It outputs contact points on the object and associated contact forces or post-contact motions for robots to achieve the desired manipulation task. We perform extensive experiments both in the simulation and real-world settings, manipulating articulated rigid objects, rigid objects, and deformable objects that vary in dimensionality, ranging from one-dimensional objects like ropes to two-dimensional objects like cloth and extending to three-dimensional objects such as plasticine. Our model achieves average success rates of around 90%. Supplementary materials and videos are available on our project website at https://manifoundationmodel.github.io/.
5/14/2024
Towards Natural Language-Driven Assembly Using Foundation Models
Omkar Joglekar, Tal Lancewicki, Shir Kozlovsky, Vladimir Tchuiev, Zohar Feldman, Dotan Di Castro
0
0
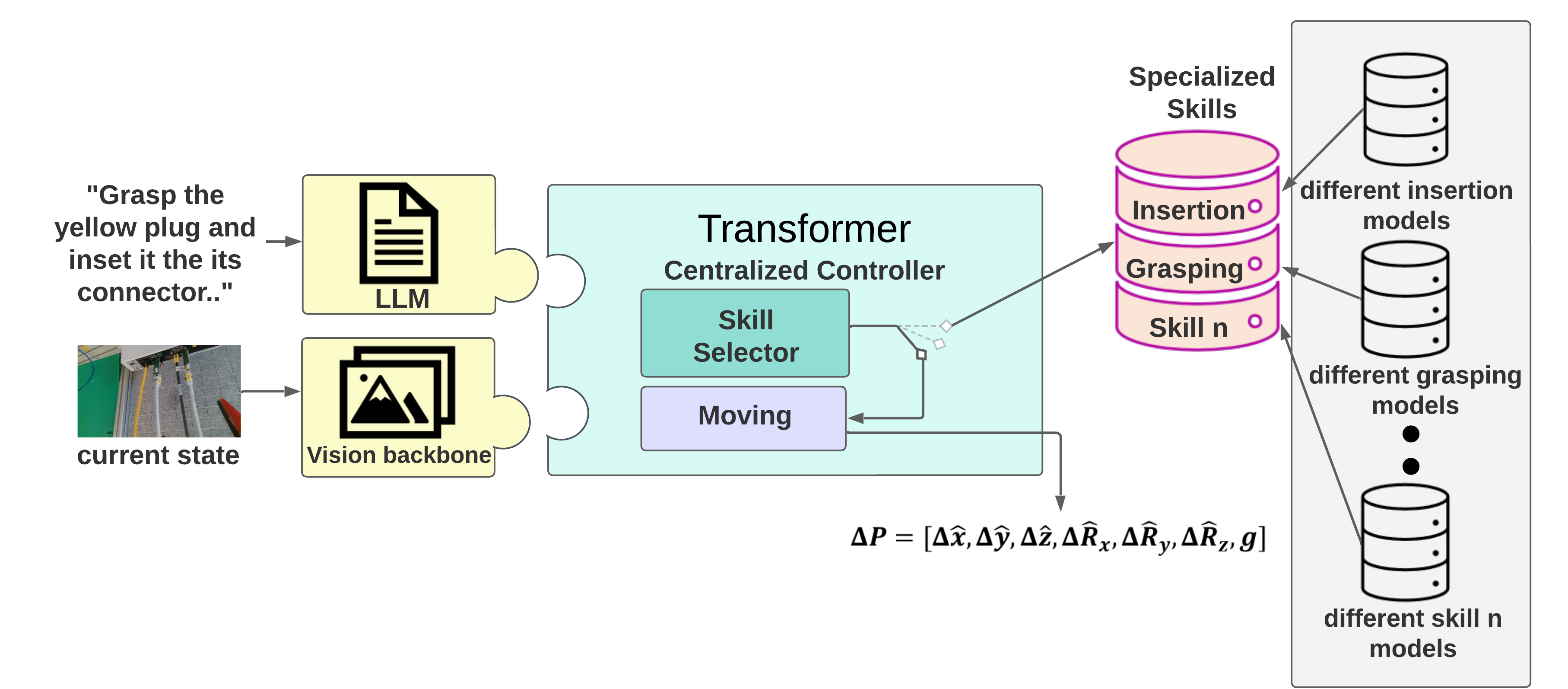
Large Language Models (LLMs) and strong vision models have enabled rapid research and development in the field of Vision-Language-Action models that enable robotic control. The main objective of these methods is to develop a generalist policy that can control robots with various embodiments. However, in industrial robotic applications such as automated assembly and disassembly, some tasks, such as insertion, demand greater accuracy and involve intricate factors like contact engagement, friction handling, and refined motor skills. Implementing these skills using a generalist policy is challenging because these policies might integrate further sensory data, including force or torque measurements, for enhanced precision. In our method, we present a global control policy based on LLMs that can transfer the control policy to a finite set of skills that are specifically trained to perform high-precision tasks through dynamic context switching. The integration of LLMs into this framework underscores their significance in not only interpreting and processing language inputs but also in enriching the control mechanisms for diverse and intricate robotic operations.
6/26/2024
🤿
Prospective Role of Foundation Models in Advancing Autonomous Vehicles
Jianhua Wu, Bingzhao Gao, Jincheng Gao, Jianhao Yu, Hongqing Chu, Qiankun Yu, Xun Gong, Yi Chang, H. Eric Tseng, Hong Chen, Jie Chen
0
0
With the development of artificial intelligence and breakthroughs in deep learning, large-scale Foundation Models (FMs), such as GPT, Sora, etc., have achieved remarkable results in many fields including natural language processing and computer vision. The application of FMs in autonomous driving holds considerable promise. For example, they can contribute to enhancing scene understanding and reasoning. By pre-training on rich linguistic and visual data, FMs can understand and interpret various elements in a driving scene, and provide cognitive reasoning to give linguistic and action instructions for driving decisions and planning. Furthermore, FMs can augment data based on the understanding of driving scenarios to provide feasible scenes of those rare occurrences in the long tail distribution that are unlikely to be encountered during routine driving and data collection. The enhancement can subsequently lead to improvement in the accuracy and reliability of autonomous driving systems. Another testament to the potential of FMs' applications lies in World Models, exemplified by the DREAMER series, which showcases the ability to comprehend physical laws and dynamics. Learning from massive data under the paradigm of self-supervised learning, World Model can generate unseen yet plausible driving environments, facilitating the enhancement in the prediction of road users' behaviors and the off-line training of driving strategies. In this paper, we synthesize the applications and future trends of FMs in autonomous driving. By utilizing the powerful capabilities of FMs, we strive to tackle the potential issues stemming from the long-tail distribution in autonomous driving, consequently advancing overall safety in this domain.
5/20/2024

FoundationGrasp: Generalizable Task-Oriented Grasping with Foundation Models
Chao Tang, Dehao Huang, Wenlong Dong, Ruinian Xu, Hong Zhang
0
0
Task-oriented grasping (TOG), which refers to the problem of synthesizing grasps on an object that are configurationally compatible with the downstream manipulation task, is the first milestone towards tool manipulation. Analogous to the activation of two brain regions responsible for semantic and geometric reasoning during cognitive processes, modeling the complex relationship between objects, tasks, and grasps requires rich prior knowledge about objects and tasks. Existing methods typically limit the prior knowledge to a closed-set scope and cannot support the generalization to novel objects and tasks out of the training set. To address such a limitation, we propose FoundationGrasp, a foundation model-based TOG framework that leverages the open-ended knowledge from foundation models to learn generalizable TOG skills. Comprehensive experiments are conducted on the contributed Language and Vision Augmented TaskGrasp (LaViA-TaskGrasp) dataset, demonstrating the superiority of FoudationGrasp over existing methods when generalizing to novel object instances, object classes, and tasks out of the training set. Furthermore, the effectiveness of FoudationGrasp is validated in real-robot grasping and manipulation experiments on a 7 DoF robotic arm. Our code, data, appendix, and video are publicly available at https://sites.google.com/view/foundationgrasp.
4/17/2024