ManiGaussian: Dynamic Gaussian Splatting for Multi-task Robotic Manipulation

0

Sign in to get full access
Overview
- This paper introduces ManiGaussian, a novel dynamic Gaussian splatting approach for multi-task robotic manipulation.
- It builds upon prior work on Gaussian splatting, sparse controlled Gaussian splatting, and sliding window Gaussian splatting.
- The proposed method aims to enable robots to efficiently and accurately manipulate a variety of objects in complex environments.
Plain English Explanation
Robots are increasingly being used for tasks like assembling products, sorting items, and fetching objects. However, getting robots to properly interact with and manipulate different objects in real-world, cluttered environments is challenging. This paper introduces a new technique called ManiGaussian that can help robots better understand and interact with the objects around them.
The core idea behind ManiGaussian is to use "Gaussian splatting" - a way of representing 3D objects and scenes using overlapping Gaussian distributions. Previous work has explored using Gaussian splatting for tasks like understanding egocentric video and editing 3D scenes, but this paper adapts the technique for robotic manipulation.
ManiGaussian allows robots to dynamically update their understanding of the objects and environment around them as the scene changes. This enables the robot to plan and execute complex manipulation tasks, like picking up and moving objects, more effectively. The paper demonstrates how ManiGaussian can help robots handle a variety of objects and complete multi-step tasks in cluttered environments.
Technical Explanation
The ManiGaussian approach builds on prior work on Gaussian splatting, sparse controlled Gaussian splatting, and sliding window Gaussian splatting. It represents the 3D environment and objects using a collection of overlapping Gaussian distributions, which can be efficiently updated as the scene changes.
The key innovations of ManiGaussian include:
- Dynamic updating: The Gaussian representations are dynamically updated to track changes in the environment, enabling the robot to reason about and interact with moving or deforming objects.
- Multi-task capability: The unified Gaussian representation supports a variety of manipulation tasks, from grasping to pushing to sliding, without the need for task-specific models.
- Efficient inference: ManiGaussian uses a sparse, controlled Gaussian splatting approach to enable real-time inference and planning on resource-constrained robotic platforms.
The paper presents experiments demonstrating ManiGaussian's ability to handle a diverse set of objects and accomplish complex, multi-step manipulation tasks in cluttered, dynamic environments. The results show significant improvements over prior state-of-the-art methods.
Critical Analysis
The paper provides a thorough evaluation of ManiGaussian's performance, including comparisons to existing techniques. However, it acknowledges several limitations and areas for future research:
- The current implementation assumes known object shapes and sizes, which may not always be the case in real-world scenarios. Extending ManiGaussian to handle unknown or deformable objects could increase its practical applicability.
- The paper focuses on manipulation in static environments, but real-world environments are often dynamic and cluttered. Improving ManiGaussian's ability to handle moving obstacles and unexpected changes would be an important next step.
- While the sparse Gaussian splatting approach enables efficient inference, the paper does not explore the computational and memory requirements of the method in depth. Understanding the scalability of ManiGaussian as the complexity of the environment and number of objects increases would be valuable.
Overall, the ManiGaussian approach represents a promising advance in robotic manipulation, but further research is needed to address these limitations and make the technique more robust and practical for real-world applications.
Conclusion
This paper introduces ManiGaussian, a novel dynamic Gaussian splatting technique for multi-task robotic manipulation. By representing the environment and objects using a unified Gaussian representation that can be efficiently updated, ManiGaussian enables robots to reason about and interact with a wide variety of objects in complex, changing environments.
The experiments demonstrate significant improvements over prior state-of-the-art methods, suggesting that ManiGaussian could be a valuable tool for advancing the capabilities of robotic systems. While the paper identifies several areas for future work, the core contributions of this research represent an important step forward in enabling robots to safely and effectively manipulate objects in the real world.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
ManiGaussian: Dynamic Gaussian Splatting for Multi-task Robotic Manipulation
Guanxing Lu, Shiyi Zhang, Ziwei Wang, Changliu Liu, Jiwen Lu, Yansong Tang
Performing language-conditioned robotic manipulation tasks in unstructured environments is highly demanded for general intelligent robots. Conventional robotic manipulation methods usually learn semantic representation of the observation for action prediction, which ignores the scene-level spatiotemporal dynamics for human goal completion. In this paper, we propose a dynamic Gaussian Splatting method named ManiGaussian for multi-task robotic manipulation, which mines scene dynamics via future scene reconstruction. Specifically, we first formulate the dynamic Gaussian Splatting framework that infers the semantics propagation in the Gaussian embedding space, where the semantic representation is leveraged to predict the optimal robot action. Then, we build a Gaussian world model to parameterize the distribution in our dynamic Gaussian Splatting framework, which provides informative supervision in the interactive environment via future scene reconstruction. We evaluate our ManiGaussian on 10 RLBench tasks with 166 variations, and the results demonstrate our framework can outperform the state-of-the-art methods by 13.1% in average success rate. Project page: https://guanxinglu.github.io/ManiGaussian/.
Read more7/19/2024

0
EgoGaussian: Dynamic Scene Understanding from Egocentric Video with 3D Gaussian Splatting
Daiwei Zhang, Gengyan Li, Jiajie Li, Mickael Bressieux, Otmar Hilliges, Marc Pollefeys, Luc Van Gool, Xi Wang
Human activities are inherently complex, and even simple household tasks involve numerous object interactions. To better understand these activities and behaviors, it is crucial to model their dynamic interactions with the environment. The recent availability of affordable head-mounted cameras and egocentric data offers a more accessible and efficient means to understand dynamic human-object interactions in 3D environments. However, most existing methods for human activity modeling either focus on reconstructing 3D models of hand-object or human-scene interactions or on mapping 3D scenes, neglecting dynamic interactions with objects. The few existing solutions often require inputs from multiple sources, including multi-camera setups, depth-sensing cameras, or kinesthetic sensors. To this end, we introduce EgoGaussian, the first method capable of simultaneously reconstructing 3D scenes and dynamically tracking 3D object motion from RGB egocentric input alone. We leverage the uniquely discrete nature of Gaussian Splatting and segment dynamic interactions from the background. Our approach employs a clip-level online learning pipeline that leverages the dynamic nature of human activities, allowing us to reconstruct the temporal evolution of the scene in chronological order and track rigid object motion. Additionally, our method automatically segments object and background Gaussians, providing 3D representations for both static scenes and dynamic objects. EgoGaussian outperforms previous NeRF and Dynamic Gaussian methods in challenging in-the-wild videos and we also qualitatively demonstrate the high quality of the reconstructed models.
Read more7/1/2024
1
SC-GS: Sparse-Controlled Gaussian Splatting for Editable Dynamic Scenes
Yi-Hua Huang, Yang-Tian Sun, Ziyi Yang, Xiaoyang Lyu, Yan-Pei Cao, Xiaojuan Qi
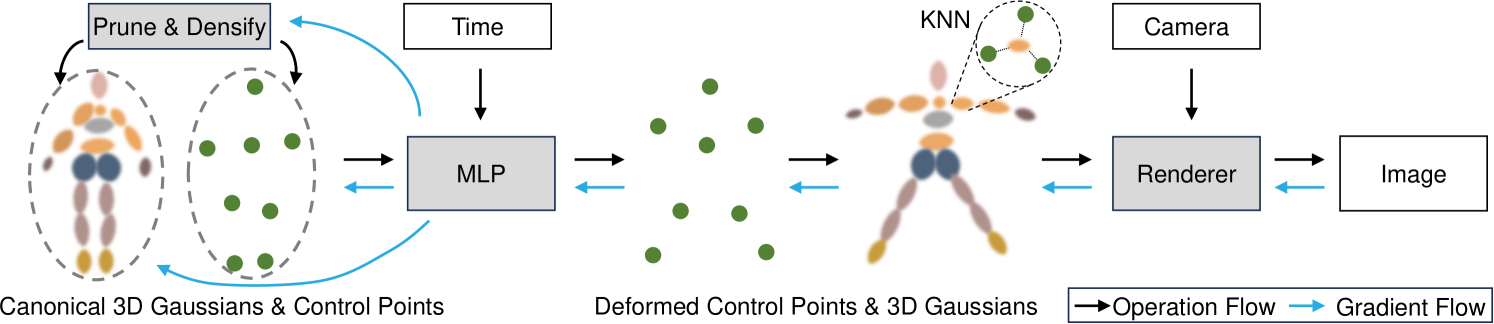
Novel view synthesis for dynamic scenes is still a challenging problem in computer vision and graphics. Recently, Gaussian splatting has emerged as a robust technique to represent static scenes and enable high-quality and real-time novel view synthesis. Building upon this technique, we propose a new representation that explicitly decomposes the motion and appearance of dynamic scenes into sparse control points and dense Gaussians, respectively. Our key idea is to use sparse control points, significantly fewer in number than the Gaussians, to learn compact 6 DoF transformation bases, which can be locally interpolated through learned interpolation weights to yield the motion field of 3D Gaussians. We employ a deformation MLP to predict time-varying 6 DoF transformations for each control point, which reduces learning complexities, enhances learning abilities, and facilitates obtaining temporal and spatial coherent motion patterns. Then, we jointly learn the 3D Gaussians, the canonical space locations of control points, and the deformation MLP to reconstruct the appearance, geometry, and dynamics of 3D scenes. During learning, the location and number of control points are adaptively adjusted to accommodate varying motion complexities in different regions, and an ARAP loss following the principle of as rigid as possible is developed to enforce spatial continuity and local rigidity of learned motions. Finally, thanks to the explicit sparse motion representation and its decomposition from appearance, our method can enable user-controlled motion editing while retaining high-fidelity appearances. Extensive experiments demonstrate that our approach outperforms existing approaches on novel view synthesis with a high rendering speed and enables novel appearance-preserved motion editing applications. Project page: https://yihua7.github.io/SC-GS-web/
Read more4/15/2024

0
SurgicalGaussian: Deformable 3D Gaussians for High-Fidelity Surgical Scene Reconstruction
Weixing Xie, Junfeng Yao, Xianpeng Cao, Qiqin Lin, Zerui Tang, Xiao Dong, Xiaohu Guo
Dynamic reconstruction of deformable tissues in endoscopic video is a key technology for robot-assisted surgery. Recent reconstruction methods based on neural radiance fields (NeRFs) have achieved remarkable results in the reconstruction of surgical scenes. However, based on implicit representation, NeRFs struggle to capture the intricate details of objects in the scene and cannot achieve real-time rendering. In addition, restricted single view perception and occluded instruments also propose special challenges in surgical scene reconstruction. To address these issues, we develop SurgicalGaussian, a deformable 3D Gaussian Splatting method to model dynamic surgical scenes. Our approach models the spatio-temporal features of soft tissues at each time stamp via a forward-mapping deformation MLP and regularization to constrain local 3D Gaussians to comply with consistent movement. With the depth initialization strategy and tool mask-guided training, our method can remove surgical instruments and reconstruct high-fidelity surgical scenes. Through experiments on various surgical videos, our network outperforms existing method on many aspects, including rendering quality, rendering speed and GPU usage. The project page can be found at https://surgicalgaussian.github.io.
Read more7/9/2024