MATCH POLICY: A Simple Pipeline from Point Cloud Registration to Manipulation Policies

0

Sign in to get full access
Overview
- The paper presents a simple pipeline for learning manipulation policies from point cloud data.
- The pipeline includes point cloud registration, object pose estimation, and policy learning.
- The approach is evaluated on several manipulation tasks, showing improved performance compared to previous methods.
Plain English Explanation
The researchers have developed a simple pipeline for teaching robots how to manipulate objects. The key steps are:
- Point Cloud Registration: The robot scans the object it needs to interact with and matches that data to a known 3D model. This lets the robot determine the object's position and orientation.
- Object Pose Estimation: Using the point cloud data, the robot figures out the exact pose (position and orientation) of the object.
- Policy Learning: The robot then learns a manipulation policy - a set of actions it can take to interact with the object in the desired way, such as grasping, lifting, or moving it.
The researchers tested this pipeline on several manipulation tasks and found it performed better than previous approaches. The simplicity of the pipeline is a key advantage, making it easier to set up and use in real-world robotic systems.
Technical Explanation
The paper presents a simple pipeline for learning manipulation policies from point cloud data. The pipeline consists of three main components:
-
Point Cloud Registration: The researchers use a point cloud registration algorithm to match the observed point cloud of an object to a known 3D model. This allows them to estimate the 6D pose (position and orientation) of the object.
-
Object Pose Estimation: With the registered point cloud, the researchers can accurately estimate the 6D pose of the object using standard techniques.
-
Policy Learning: Finally, the researchers learn a manipulation policy conditioned on the object's estimated pose. They use a neural network architecture that takes the pose information as input and outputs the desired robot actions to manipulate the object.
The researchers evaluate their pipeline on several manipulation tasks, including grasping, lifting, and placing objects. They show that their approach outperforms previous methods that relied on more complex perception and control pipelines.
Critical Analysis
The simple pipeline presented in this paper is an interesting and promising approach to learning robotic manipulation policies. By breaking down the problem into well-defined subtasks (registration, pose estimation, policy learning), the researchers have created a modular system that is easier to set up and deploy than more complex end-to-end approaches.
However, the paper does not address some potential limitations of the approach. For example, the point cloud registration step may be sensitive to occlusions or noise in the sensor data, which could degrade the overall performance. Additionally, the policy learning component is trained on a limited set of tasks and objects, so the generalization capabilities of the learned policies are not thoroughly explored.
Further research could investigate ways to make the pipeline more robust to real-world sensing and actuation challenges, as well as explore techniques for learning more generalizable manipulation policies. Expanding the range of tasks and objects evaluated would also help validate the broader applicability of the approach.
Conclusion
The simple pipeline presented in this paper offers a promising approach to learning robotic manipulation policies from point cloud data. By breaking down the problem into well-defined subtasks, the researchers have created a modular system that is easier to set up and deploy than more complex end-to-end approaches. While the paper demonstrates improved performance on several manipulation tasks, further research is needed to address potential limitations and expand the capabilities of the system.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
MATCH POLICY: A Simple Pipeline from Point Cloud Registration to Manipulation Policies
Haojie Huang, Haotian Liu, Dian Wang, Robin Walters, Robert Platt
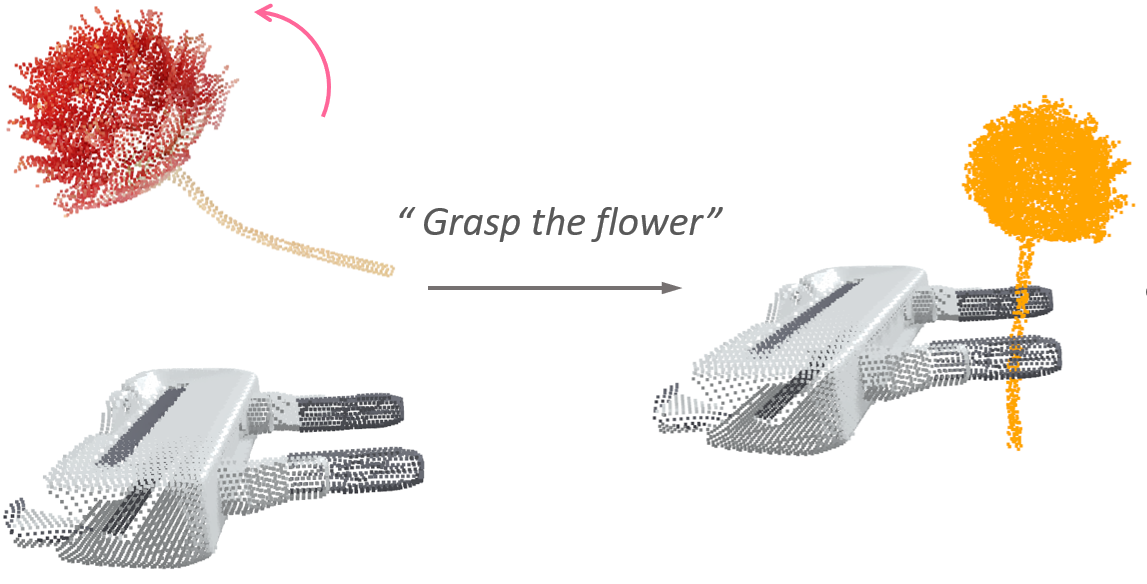
Many manipulation tasks require the robot to rearrange objects relative to one another. Such tasks can be described as a sequence of relative poses between parts of a set of rigid bodies. In this work, we propose MATCH POLICY, a simple but novel pipeline for solving high-precision pick and place tasks. Instead of predicting actions directly, our method registers the pick and place targets to the stored demonstrations. This transfers action inference into a point cloud registration task and enables us to realize nontrivial manipulation policies without any training. MATCH POLICY is designed to solve high-precision tasks with a key-frame setting. By leveraging the geometric interaction and the symmetries of the task, it achieves extremely high sample efficiency and generalizability to unseen configurations. We demonstrate its state-of-the-art performance across various tasks on RLBench benchmark compared with several strong baselines and test it on a real robot with six tasks.
Read more9/25/2024

0
Learning Robotic Manipulation Policies from Point Clouds with Conditional Flow Matching
Eugenio Chisari, Nick Heppert, Max Argus, Tim Welschehold, Thomas Brox, Abhinav Valada
Learning from expert demonstrations is a promising approach for training robotic manipulation policies from limited data. However, imitation learning algorithms require a number of design choices ranging from the input modality, training objective, and 6-DoF end-effector pose representation. Diffusion-based methods have gained popularity as they enable predicting long-horizon trajectories and handle multimodal action distributions. Recently, Conditional Flow Matching (CFM) (or Rectified Flow) has been proposed as a more flexible generalization of diffusion models. In this paper, we investigate the application of CFM in the context of robotic policy learning and specifically study the interplay with the other design choices required to build an imitation learning algorithm. We show that CFM gives the best performance when combined with point cloud input observations. Additionally, we study the feasibility of a CFM formulation on the SO(3) manifold and evaluate its suitability with a simplified example. We perform extensive experiments on RLBench which demonstrate that our proposed PointFlowMatch approach achieves a state-of-the-art average success rate of 67.8% over eight tasks, double the performance of the next best method.
Read more9/12/2024
0
Imagination Policy: Using Generative Point Cloud Models for Learning Manipulation Policies
Haojie Huang, Karl Schmeckpeper, Dian Wang, Ondrej Biza, Yaoyao Qian, Haotian Liu, Mingxi Jia, Robert Platt, Robin Walters
Humans can imagine goal states during planning and perform actions to match those goals. In this work, we propose Imagination Policy, a novel multi-task key-frame policy network for solving high-precision pick and place tasks. Instead of learning actions directly, Imagination Policy generates point clouds to imagine desired states which are then translated to actions using rigid action estimation. This transforms action inference into a local generative task. We leverage pick and place symmetries underlying the tasks in the generation process and achieve extremely high sample efficiency and generalizability to unseen configurations. Finally, we demonstrate state-of-the-art performance across various tasks on the RLbench benchmark compared with several strong baselines.
Read more6/18/2024

0
3D Geometric Shape Assembly via Efficient Point Cloud Matching
Nahyuk Lee, Juhong Min, Junha Lee, Seungwook Kim, Kanghee Lee, Jaesik Park, Minsu Cho
Learning to assemble geometric shapes into a larger target structure is a pivotal task in various practical applications. In this work, we tackle this problem by establishing local correspondences between point clouds of part shapes in both coarse- and fine-levels. To this end, we introduce Proxy Match Transform (PMT), an approximate high-order feature transform layer that enables reliable matching between mating surfaces of parts while incurring low costs in memory and computation. Building upon PMT, we introduce a new framework, dubbed Proxy Match TransformeR (PMTR), for the geometric assembly task. We evaluate the proposed PMTR on the large-scale 3D geometric shape assembly benchmark dataset of Breaking Bad and demonstrate its superior performance and efficiency compared to state-of-the-art methods. Project page: https://nahyuklee.github.io/pmtr.
Read more7/16/2024