MaxMI: A Maximal Mutual Information Criterion for Manipulation Concept Discovery

0

Sign in to get full access
Overview
- The paper proposes a new criterion called MaxMI for self-supervised concept discovery in robotic manipulation tasks.
- MaxMI aims to learn manipulation concepts that maximize the mutual information between the learned concepts and the system's observations.
- The authors present experimental results showing that MaxMI can discover more informative and generalizable manipulation concepts compared to existing approaches.
Plain English Explanation
The researchers have developed a new way to help robots learn about the world around them, specifically when it comes to manipulation tasks like picking up and moving objects. Their approach, called MaxMI, is designed to discover useful "concepts" that capture important information about the robot's observations and actions.
The key idea behind MaxMI is to learn concepts that maximize the mutual information between the concepts and the robot's sensory inputs. In other words, the learned concepts should contain as much relevant information as possible about what the robot is seeing and doing. By discovering these informative concepts, the robot can build a better understanding of manipulation tasks and potentially generalize that knowledge to new situations.
The researchers have tested MaxMI and shown that it can discover more meaningful and versatile manipulation concepts compared to other existing methods. This could ultimately help robots become more capable and adaptable in real-world manipulation scenarios.
Technical Explanation
The paper introduces a new criterion called MaxMI for self-supervised concept discovery in robotic manipulation tasks. The goal of MaxMI is to learn manipulation concepts that maximize the mutual information between the learned concepts and the system's observations.
The authors formulate the concept discovery problem as an optimization task, where the objective is to find a set of latent concepts that capture the most relevant information about the robot's interactions with the environment. Specifically, they define a mutual information-based objective function that encourages the learned concepts to be maximally informative about the system's observations.
The authors present a training procedure that alternates between learning the concept encoder, which maps observations to concepts, and learning the concept-conditional observation model, which predicts the observations given the concepts. This allows the system to discover concepts that are both predictive of the observations and maximally informative about them.
The authors evaluate the MaxMI approach on several robotic manipulation benchmarks and show that it can discover more informative and generalizable manipulation concepts compared to existing self-supervised learning methods. The learned concepts are shown to be useful for downstream tasks such as object affordance prediction and action planning.
Critical Analysis
The paper presents a well-designed and thorough evaluation of the MaxMI approach, exploring its performance on a range of robotic manipulation tasks. The authors also discuss several important limitations and potential issues with the method.
One key limitation is the reliance on access to the full state of the system during training, which may not be realistic in many real-world scenarios. The authors acknowledge this and suggest exploring ways to extend the approach to work with partial observations.
Another potential concern is the computational complexity of the optimization process, which may limit the scalability of the method to larger and more complex manipulation domains. The authors mention plans to investigate more efficient optimization techniques in future work.
Finally, while the paper demonstrates the advantages of MaxMI over existing approaches, it would be valuable to see further comparisons to other recent self-supervised concept discovery methods, such as those based on generative or contrastive learning objectives.
Overall, the MaxMI approach represents an interesting and promising step forward in the field of robotic manipulation concept discovery, and the authors have identified important areas for future research and improvement.
Conclusion
The MaxMI paper presents a novel criterion for self-supervised concept discovery in robotic manipulation tasks. By learning latent concepts that maximize the mutual information between the concepts and the system's observations, the approach can discover more informative and generalizable manipulation concepts compared to existing methods.
The authors have demonstrated the effectiveness of MaxMI through extensive experiments, and have also outlined important limitations and future research directions. Ultimately, the MaxMI approach has the potential to significantly improve the capability and adaptability of robotic manipulation systems, which could have important implications for a wide range of real-world applications.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
MaxMI: A Maximal Mutual Information Criterion for Manipulation Concept Discovery
Pei Zhou, Yanchao Yang
We aim to discover manipulation concepts embedded in the unannotated demonstrations, which are recognized as key physical states. The discovered concepts can facilitate training manipulation policies and promote generalization. Current methods relying on multimodal foundation models for deriving key states usually lack accuracy and semantic consistency due to limited multimodal robot data. In contrast, we introduce an information-theoretic criterion to characterize the regularities that signify a set of physical states. We also develop a framework that trains a concept discovery network using this criterion, thus bypassing the dependence on human semantics and alleviating costly human labeling. The proposed criterion is based on the observation that key states, which deserve to be conceptualized, often admit more physical constraints than non-key states. This phenomenon can be formalized as maximizing the mutual information between the putative key state and its preceding state, i.e., Maximal Mutual Information (MaxMI). By employing MaxMI, the trained key state localization network can accurately identify states of sufficient physical significance, exhibiting reasonable semantic compatibility with human perception. Furthermore, the proposed framework produces key states that lead to concept-guided manipulation policies with higher success rates and better generalization in various robotic tasks compared to the baselines, verifying the effectiveness of the proposed criterion.
Read more7/23/2024

0
InfoCon: Concept Discovery with Generative and Discriminative Informativeness
Ruizhe Liu, Qian Luo, Yanchao Yang
We focus on the self-supervised discovery of manipulation concepts that can be adapted and reassembled to address various robotic tasks. We propose that the decision to conceptualize a physical procedure should not depend on how we name it (semantics) but rather on the significance of the informativeness in its representation regarding the low-level physical state and state changes. We model manipulation concepts (discrete symbols) as generative and discriminative goals and derive metrics that can autonomously link them to meaningful sub-trajectories from noisy, unlabeled demonstrations. Specifically, we employ a trainable codebook containing encodings (concepts) capable of synthesizing the end-state of a sub-trajectory given the current state (generative informativeness). Moreover, the encoding corresponding to a particular sub-trajectory should differentiate the state within and outside it and confidently predict the subsequent action based on the gradient of its discriminative score (discriminative informativeness). These metrics, which do not rely on human annotation, can be seamlessly integrated into a VQ-VAE framework, enabling the partitioning of demonstrations into semantically consistent sub-trajectories, fulfilling the purpose of discovering manipulation concepts and the corresponding sub-goal (key) states. We evaluate the effectiveness of the learned concepts by training policies that utilize them as guidance, demonstrating superior performance compared to other baselines. Additionally, our discovered manipulation concepts compare favorably to human-annotated ones while saving much manual effort.
Read more4/17/2024
0
Aligning Explanations for Recommendation with Rating and Feature via Maximizing Mutual Information
Yurou Zhao, Yiding Sun, Ruidong Han, Fei Jiang, Lu Guan, Xiang Li, Wei Lin, Weizhi Ma, Jiaxin Mao
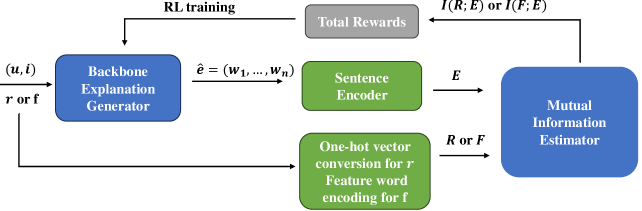
Providing natural language-based explanations to justify recommendations helps to improve users' satisfaction and gain users' trust. However, as current explanation generation methods are commonly trained with an objective to mimic existing user reviews, the generated explanations are often not aligned with the predicted ratings or some important features of the recommended items, and thus, are suboptimal in helping users make informed decision on the recommendation platform. To tackle this problem, we propose a flexible model-agnostic method named MMI (Maximizing Mutual Information) framework to enhance the alignment between the generated natural language explanations and the predicted rating/important item features. Specifically, we propose to use mutual information (MI) as a measure for the alignment and train a neural MI estimator. Then, we treat a well-trained explanation generation model as the backbone model and further fine-tune it through reinforcement learning with guidance from the MI estimator, which rewards a generated explanation that is more aligned with the predicted rating or a pre-defined feature of the recommended item. Experiments on three datasets demonstrate that our MMI framework can boost different backbone models, enabling them to outperform existing baselines in terms of alignment with predicted ratings and item features. Additionally, user studies verify that MI-enhanced explanations indeed facilitate users' decisions and are favorable compared with other baselines due to their better alignment properties.
Read more8/22/2024
0
Explicit Mutual Information Maximization for Self-Supervised Learning
Lele Chang, Peilin Liu, Qinghai Guo, Fei Wen
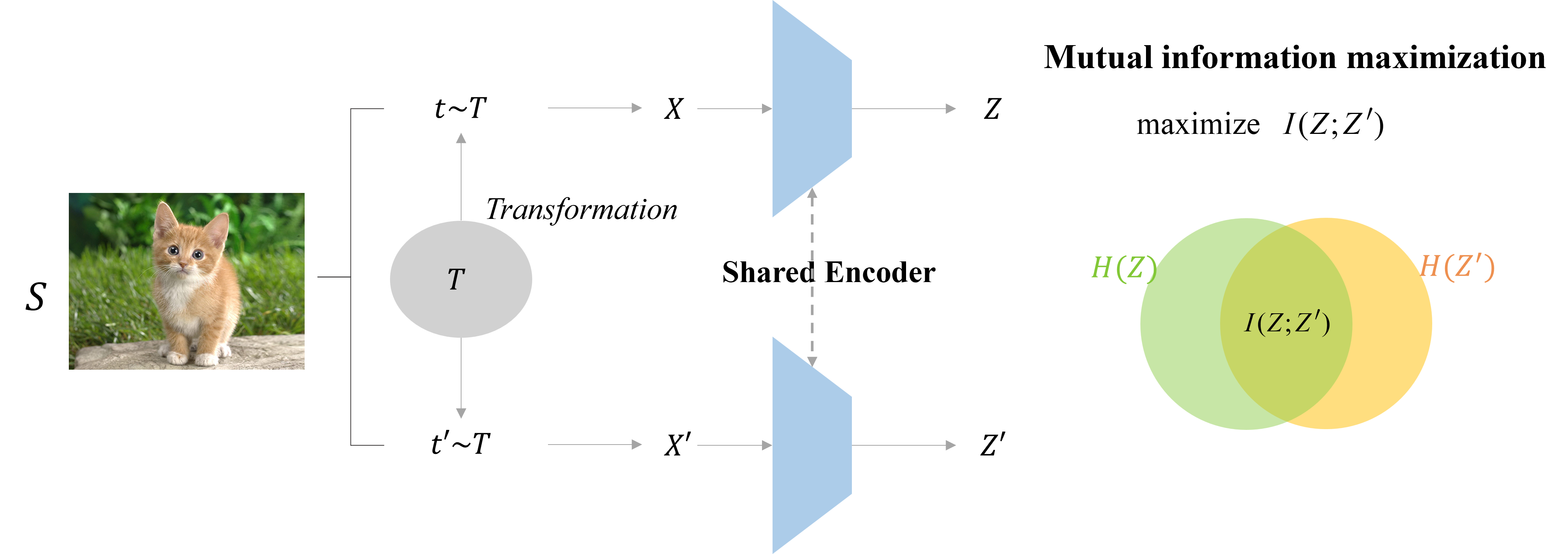
Recently, self-supervised learning (SSL) has been extensively studied. Theoretically, mutual information maximization (MIM) is an optimal criterion for SSL, with a strong theoretical foundation in information theory. However, it is difficult to directly apply MIM in SSL since the data distribution is not analytically available in applications. In practice, many existing methods can be viewed as approximate implementations of the MIM criterion. This work shows that, based on the invariance property of MI, explicit MI maximization can be applied to SSL under a generic distribution assumption, i.e., a relaxed condition of the data distribution. We further illustrate this by analyzing the generalized Gaussian distribution. Based on this result, we derive a loss function based on the MIM criterion using only second-order statistics. We implement the new loss for SSL and demonstrate its effectiveness via extensive experiments.
Read more9/14/2024