M${^2}$Depth: Self-supervised Two-Frame Multi-camera Metric Depth Estimation
2405.02004
0
0
📉
Abstract
This paper presents a novel self-supervised two-frame multi-camera metric depth estimation network, termed M${^2}$Depth, which is designed to predict reliable scale-aware surrounding depth in autonomous driving. Unlike the previous works that use multi-view images from a single time-step or multiple time-step images from a single camera, M${^2}$Depth takes temporally adjacent two-frame images from multiple cameras as inputs and produces high-quality surrounding depth. We first construct cost volumes in spatial and temporal domains individually and propose a spatial-temporal fusion module that integrates the spatial-temporal information to yield a strong volume presentation. We additionally combine the neural prior from SAM features with internal features to reduce the ambiguity between foreground and background and strengthen the depth edges. Extensive experimental results on nuScenes and DDAD benchmarks show M${^2}$Depth achieves state-of-the-art performance. More results can be found in https://heiheishuang.xyz/M2Depth .
Create account to get full access
Overview
- This paper presents a novel depth estimation network called M²Depth that uses two-frame images from multiple cameras to predict reliable scale-aware surrounding depth in autonomous driving scenarios.
- Unlike previous methods, M²Depth combines spatial and temporal information to produce high-quality depth maps, and it also leverages neural priors to improve depth edge detection.
- Experiments on the nuScenes and DDAD datasets show that M²Depth achieves state-of-the-art performance in depth estimation for autonomous driving.
Plain English Explanation
M²Depth is a new depth estimation system that uses images from multiple cameras taken at slightly different time points to create accurate 3D depth information around a self-driving car. Previous methods either used images from a single camera at one time point or images from multiple cameras at the same time, but M²Depth combines both spatial and temporal information to get the best of both worlds.
The key innovation is the way M²Depth processes the input images. First, it creates cost volumes that capture the spatial and temporal relationships between the images. Then, it fuses these spatial and temporal cost volumes together to get a robust 3D representation. Finally, it combines this with neural priors, which are general patterns the model has learned, to refine the depth edges and distinguish the foreground from the background.
This produces depth maps that are highly accurate and can give the self-driving car a clear understanding of its 3D surroundings, which is crucial for safe navigation. The researchers showed that M²Depth outperforms previous state-of-the-art methods on standard autonomous driving benchmarks.
Technical Explanation
M²Depth is designed to leverage two-frame images from multiple cameras to estimate accurate, scale-aware depth in autonomous driving scenarios. Unlike prior work that used either single-view images at one time point or multi-view images at the same time point, M²Depth combines spatial and temporal information to produce high-quality depth maps.
The core of the M²Depth architecture is a spatial-temporal fusion module that integrates cost volumes constructed in the spatial and temporal domains. The spatial cost volume captures the geometric relationships between the multi-view images, while the temporal cost volume encodes the motion dynamics between the two time frames. Fusing these two cost volumes enables M²Depth to effectively leverage both spatial and temporal cues.
Additionally, M²Depth combines the neural prior from SAM features with its internal features to reduce ambiguity between the foreground and background, and to strengthen the depth edges. This helps M²Depth produce sharper, more reliable depth predictions.
Extensive experiments on the nuScenes and DDAD benchmarks demonstrate that M²Depth achieves state-of-the-art performance in depth estimation for autonomous driving, surpassing previous monocular and multi-view depth estimation methods.
Critical Analysis
The paper provides a thorough evaluation of M²Depth's performance, comparing it to a wide range of prior work on standard autonomous driving depth estimation benchmarks. The results clearly show the benefits of the spatial-temporal fusion approach and the incorporation of neural priors.
However, the paper does not deeply discuss the potential limitations or failure cases of the M²Depth system. For example, it is unclear how well the method would perform in challenging lighting conditions, such as very low light or strong shadows, or in complex urban environments with many occlusions. Additionally, the reliance on multiple camera inputs may limit the applicability of M²Depth to situations where only a single camera is available.
Further research could explore ways to make M²Depth more robust to diverse environmental conditions, or to adapt the approach to work with monocular or sparse multi-view inputs. Investigating the computational and memory requirements of the system would also be valuable, as efficiency is a key concern for real-world autonomous driving applications.
Conclusion
This paper presents a novel depth estimation network called M²Depth that leverages two-frame multi-camera inputs to predict reliable, scale-aware depth in autonomous driving scenarios. By fusing spatial and temporal cost volumes, and combining neural priors with internal features, M²Depth is able to outperform previous state-of-the-art depth estimation methods on standard benchmarks.
The ability to accurately estimate 3D depth from camera inputs is a critical capability for self-driving cars, enabling them to understand and navigate their surroundings safely. The innovations in M²Depth represent an important step forward in this area, and the techniques could potentially be applied to other computer vision tasks that require robust 3D perception.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
DoubleTake: Geometry Guided Depth Estimation
Mohamed Sayed, Filippo Aleotti, Jamie Watson, Zawar Qureshi, Guillermo Garcia-Hernando, Gabriel Brostow, Sara Vicente, Michael Firman
0
0
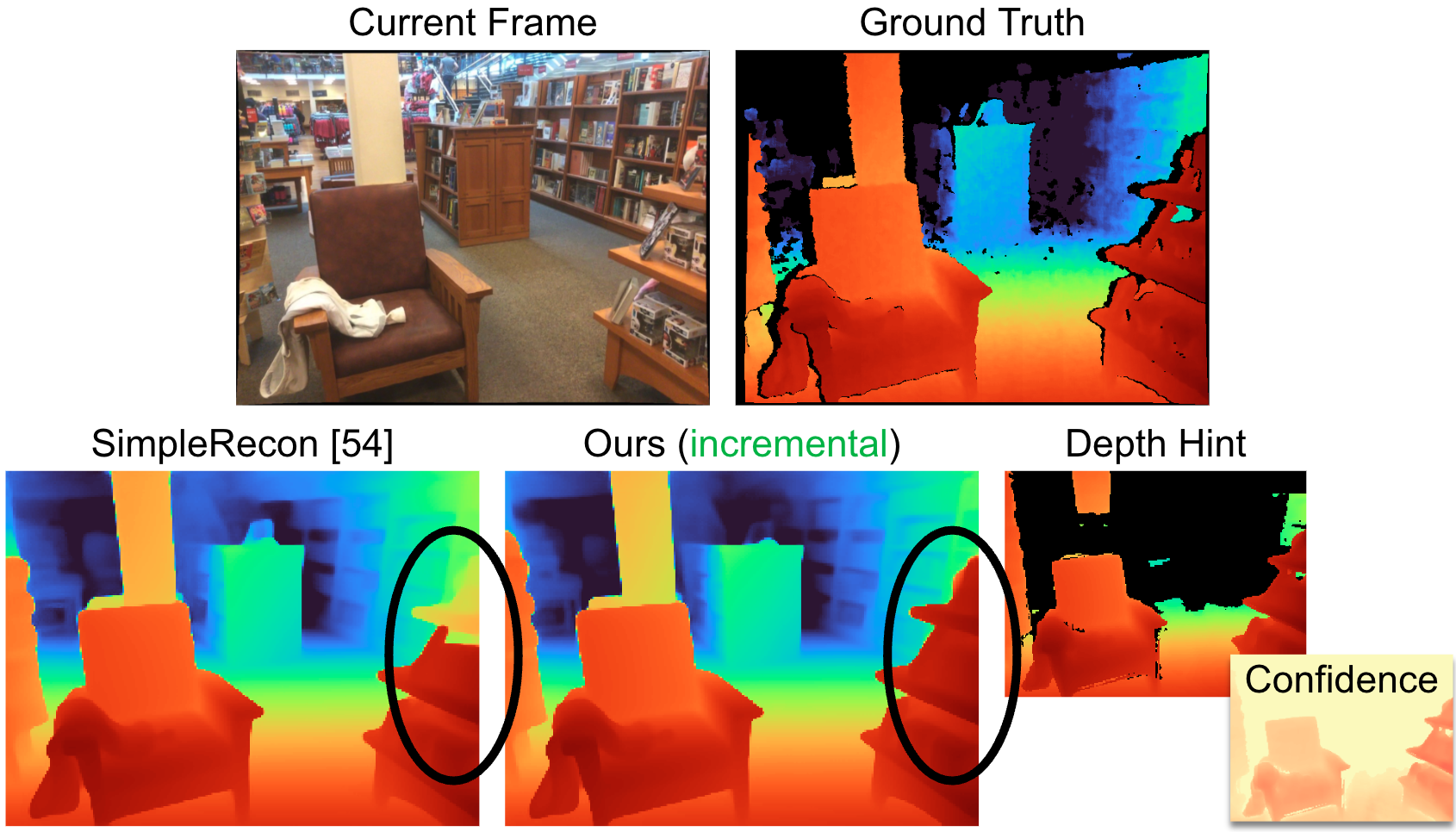
Estimating depth from a sequence of posed RGB images is a fundamental computer vision task, with applications in augmented reality, path planning etc. Prior work typically makes use of previous frames in a multi view stereo framework, relying on matching textures in a local neighborhood. In contrast, our model leverages historical predictions by giving the latest 3D geometry data as an extra input to our network. This self-generated geometric hint can encode information from areas of the scene not covered by the keyframes and it is more regularized when compared to individual predicted depth maps for previous frames. We introduce a Hint MLP which combines cost volume features with a hint of the prior geometry, rendered as a depth map from the current camera location, together with a measure of the confidence in the prior geometry. We demonstrate that our method, which can run at interactive speeds, achieves state-of-the-art estimates of depth and 3D scene reconstruction in both offline and incremental evaluation scenarios.
6/27/2024
📈
Mining Supervision for Dynamic Regions in Self-Supervised Monocular Depth Estimation
Hoang Chuong Nguyen, Tianyu Wang, Jose M. Alvarez, Miaomiao Liu
0
0
This paper focuses on self-supervised monocular depth estimation in dynamic scenes trained on monocular videos. Existing methods jointly estimate pixel-wise depth and motion, relying mainly on an image reconstruction loss. Dynamic regions1 remain a critical challenge for these methods due to the inherent ambiguity in depth and motion estimation, resulting in inaccurate depth estimation. This paper proposes a self-supervised training framework exploiting pseudo depth labels for dynamic regions from training data. The key contribution of our framework is to decouple depth estimation for static and dynamic regions of images in the training data. We start with an unsupervised depth estimation approach, which provides reliable depth estimates for static regions and motion cues for dynamic regions and allows us to extract moving object information at the instance level. In the next stage, we use an object network to estimate the depth of those moving objects assuming rigid motions. Then, we propose a new scale alignment module to address the scale ambiguity between estimated depths for static and dynamic regions. We can then use the depth labels generated to train an end-to-end depth estimation network and improve its performance. Extensive experiments on the Cityscapes and KITTI datasets show that our self-training strategy consistently outperforms existing self/unsupervised depth estimation methods.
4/24/2024
🔄
Enhanced Object Tracking by Self-Supervised Auxiliary Depth Estimation Learning
Zhenyu Wei, Yujie He, Zhanchuan Cai
0
0
RGB-D tracking significantly improves the accuracy of object tracking. However, its dependency on real depth inputs and the complexity involved in multi-modal fusion limit its applicability across various scenarios. The utilization of depth information in RGB-D tracking inspired us to propose a new method, named MDETrack, which trains a tracking network with an additional capability to understand the depth of scenes, through supervised or self-supervised auxiliary Monocular Depth Estimation learning. The outputs of MDETrack's unified feature extractor are fed to the side-by-side tracking head and auxiliary depth estimation head, respectively. The auxiliary module will be discarded in inference, thus keeping the same inference speed. We evaluated our models with various training strategies on multiple datasets, and the results show an improved tracking accuracy even without real depth. Through these findings we highlight the potential of depth estimation in enhancing object tracking performance.
5/24/2024

Uncertainty and Self-Supervision in Single-View Depth
Javier Rodriguez-Puigvert
0
0
Single-view depth estimation refers to the ability to derive three-dimensional information per pixel from a single two-dimensional image. Single-view depth estimation is an ill-posed problem because there are multiple depth solutions that explain 3D geometry from a single view. While deep neural networks have been shown to be effective at capturing depth from a single view, the majority of current methodologies are deterministic in nature. Accounting for uncertainty in the predictions can avoid disastrous consequences when applied to fields such as autonomous driving or medical robotics. We have addressed this problem by quantifying the uncertainty of supervised single-view depth for Bayesian deep neural networks. There are scenarios, especially in medicine in the case of endoscopic images, where such annotated data is not available. To alleviate the lack of data, we present a method that improves the transition from synthetic to real domain methods. We introduce an uncertainty-aware teacher-student architecture that is trained in a self-supervised manner, taking into account the teacher uncertainty. Given the vast amount of unannotated data and the challenges associated with capturing annotated depth in medical minimally invasive procedures, we advocate a fully self-supervised approach that only requires RGB images and the geometric and photometric calibration of the endoscope. In endoscopic imaging, the camera and light sources are co-located at a small distance from the target surfaces. This setup indicates that brighter areas of the image are nearer to the camera, while darker areas are further away. Building on this observation, we exploit the fact that for any given albedo and surface orientation, pixel brightness is inversely proportional to the square of the distance. We propose the use of illumination as a strong single-view self-supervisory signal for deep neural networks.
6/21/2024