Mining Supervision for Dynamic Regions in Self-Supervised Monocular Depth Estimation
2404.14908
0
0
📈
Abstract
This paper focuses on self-supervised monocular depth estimation in dynamic scenes trained on monocular videos. Existing methods jointly estimate pixel-wise depth and motion, relying mainly on an image reconstruction loss. Dynamic regions1 remain a critical challenge for these methods due to the inherent ambiguity in depth and motion estimation, resulting in inaccurate depth estimation. This paper proposes a self-supervised training framework exploiting pseudo depth labels for dynamic regions from training data. The key contribution of our framework is to decouple depth estimation for static and dynamic regions of images in the training data. We start with an unsupervised depth estimation approach, which provides reliable depth estimates for static regions and motion cues for dynamic regions and allows us to extract moving object information at the instance level. In the next stage, we use an object network to estimate the depth of those moving objects assuming rigid motions. Then, we propose a new scale alignment module to address the scale ambiguity between estimated depths for static and dynamic regions. We can then use the depth labels generated to train an end-to-end depth estimation network and improve its performance. Extensive experiments on the Cityscapes and KITTI datasets show that our self-training strategy consistently outperforms existing self/unsupervised depth estimation methods.
Create account to get full access
Overview
- This paper focuses on improving self-supervised monocular depth estimation in dynamic scenes using monocular videos.
- Existing methods struggle with dynamic regions due to the inherent ambiguity in depth and motion estimation, leading to inaccurate depth predictions.
- The proposed framework addresses this challenge by decoupling depth estimation for static and dynamic regions, leveraging pseudo depth labels for dynamic regions.
Plain English Explanation
The paper discusses a new approach to estimating depth from single images, without using any depth sensors or additional information beyond the image itself. This is known as "monocular depth estimation," and it's a challenging task, especially in scenes with lots of movement and changing objects.
Existing methods try to estimate depth and motion at the same time, using the overall appearance of the image to figure out how far away different parts of the scene are. However, this approach struggles when there are dynamic or moving objects in the scene, because it's hard to separate the depth information from the motion information.
To address this, the researchers developed a new training framework that explicitly separates the depth estimation for static and dynamic regions of the image. They start with a basic depth estimation model that provides reliable depth for the static parts of the scene, and also gives them clues about where the moving objects are. Then, they use a separate "object network" to estimate the depth of those moving objects, assuming they're moving rigidly.
Finally, they align the depth estimates for the static and dynamic regions to resolve any scale ambiguity, and use all of this information to train a more accurate end-to-end depth estimation model. The key insight is that by treating static and dynamic regions differently, they can get much better depth predictions, even in complex, changing scenes.
Technical Explanation
The paper proposes a self-supervised training framework to address the challenge of monocular depth estimation in dynamic scenes. Existing methods that jointly estimate pixel-wise depth and motion, relying primarily on an image reconstruction loss, struggle with dynamic regions due to the inherent ambiguity in depth and motion estimation.
The key contribution of the proposed framework is to decouple depth estimation for static and dynamic regions of the training images. The authors start with an unsupervised depth estimation approach, which provides reliable depth estimates for static regions and motion cues for dynamic regions. This allows them to extract moving object information at the instance level.
Next, the authors use an "object network" to estimate the depth of those moving objects, assuming rigid motions. They then introduce a new "scale alignment module" to address the scale ambiguity between the estimated depths for static and dynamic regions.
With the depth labels generated, the authors train an end-to-end depth estimation network, which consistently outperforms existing self/unsupervised depth estimation methods on the Cityscapes and KITTI datasets.
Critical Analysis
The paper presents a well-designed framework that effectively addresses the challenge of monocular depth estimation in dynamic scenes. The key strength of the approach is its ability to decouple depth estimation for static and dynamic regions, leveraging pseudo depth labels for the dynamic regions.
One potential limitation is the reliance on the accuracy of the initial unsupervised depth estimation model, which provides the foundation for the rest of the framework. If this model performs poorly, it could lead to suboptimal results downstream. Additionally, the authors do not provide a detailed analysis of the computational complexity and runtime of their approach, which would be useful for understanding its practical feasibility.
Further research could explore ways to further improve the depth estimation quality, such as integrating more sophisticated motion modeling or incorporating additional cues beyond the monocular video. Exploring the generalization of the approach to a wider range of dynamic scenes and applications would also be a valuable direction.
Conclusion
This paper presents a novel self-supervised training framework for monocular depth estimation in dynamic scenes. By decoupling the depth estimation for static and dynamic regions and leveraging pseudo depth labels, the proposed approach significantly outperforms existing self/unsupervised methods on benchmark datasets. The insights and techniques developed in this work have the potential to advance the field of monocular depth estimation, enabling more robust and accurate depth prediction, even in complex, changing environments.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers

Self-Supervised Monocular Depth Estimation in the Dark: Towards Data Distribution Compensation
Haolin Yang, Chaoqiang Zhao, Lu Sheng, Yang Tang
0
0
Nighttime self-supervised monocular depth estimation has received increasing attention in recent years. However, using night images for self-supervision is unreliable because the photometric consistency assumption is usually violated in the videos taken under complex lighting conditions. Even with domain adaptation or photometric loss repair, performance is still limited by the poor supervision of night images on trainable networks. In this paper, we propose a self-supervised nighttime monocular depth estimation method that does not use any night images during training. Our framework utilizes day images as a stable source for self-supervision and applies physical priors (e.g., wave optics, reflection model and read-shot noise model) to compensate for some key day-night differences. With day-to-night data distribution compensation, our framework can be trained in an efficient one-stage self-supervised manner. Though no nighttime images are considered during training, qualitative and quantitative results demonstrate that our method achieves SoTA depth estimating results on the challenging nuScenes-Night and RobotCar-Night compared with existing methods.
4/23/2024
Unsupervised Monocular Depth Estimation Based on Hierarchical Feature-Guided Diffusion
Runze Liu, Dongchen Zhu, Guanghui Zhang, Yue Xu, Wenjun Shi, Xiaolin Zhang, Lei Wang, Jiamao Li
0
0
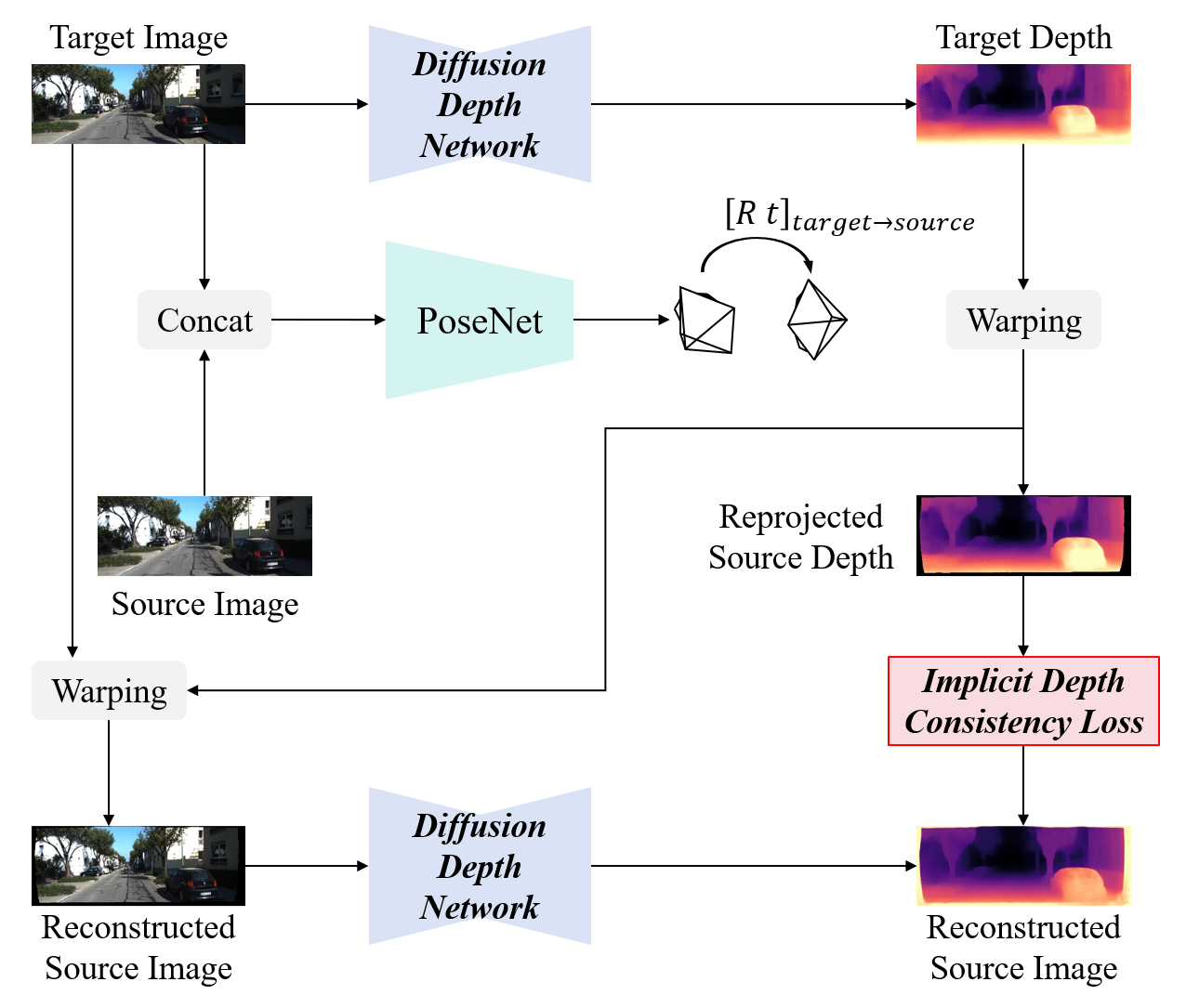
Unsupervised monocular depth estimation has received widespread attention because of its capability to train without ground truth. In real-world scenarios, the images may be blurry or noisy due to the influence of weather conditions and inherent limitations of the camera. Therefore, it is particularly important to develop a robust depth estimation model. Benefiting from the training strategies of generative networks, generative-based methods often exhibit enhanced robustness. In light of this, we employ a well-converging diffusion model among generative networks for unsupervised monocular depth estimation. Additionally, we propose a hierarchical feature-guided denoising module. This model significantly enriches the model's capacity for learning and interpreting depth distribution by fully leveraging image features to guide the denoising process. Furthermore, we explore the implicit depth within reprojection and design an implicit depth consistency loss. This loss function serves to enhance the performance of the model and ensure the scale consistency of depth within a video sequence. We conduct experiments on the KITTI, Make3D, and our self-collected SIMIT datasets. The results indicate that our approach stands out among generative-based models, while also showcasing remarkable robustness.
6/17/2024

Self-supervised Pretraining and Finetuning for Monocular Depth and Visual Odometry
Boris Chidlovskii, Leonid Antsfeld
0
0
For the task of simultaneous monocular depth and visual odometry estimation, we propose learning self-supervised transformer-based models in two steps. Our first step consists in a generic pretraining to learn 3D geometry, using cross-view completion objective (CroCo), followed by self-supervised finetuning on non-annotated videos. We show that our self-supervised models can reach state-of-the-art performance 'without bells and whistles' using standard components such as visual transformers, dense prediction transformers and adapters. We demonstrate the effectiveness of our proposed method by running evaluations on six benchmark datasets, both static and dynamic, indoor and outdoor, with synthetic and real images. For all datasets, our method outperforms state-of-the-art methods, in particular for depth prediction task.
6/18/2024

DCPI-Depth: Explicitly Infusing Dense Correspondence Prior to Unsupervised Monocular Depth Estimation
Mengtan Zhang, Yi Feng, Qijun Chen, Rui Fan
0
0
There has been a recent surge of interest in learning to perceive depth from monocular videos in an unsupervised fashion. A key challenge in this field is achieving robust and accurate depth estimation in challenging scenarios, particularly in regions with weak textures or where dynamic objects are present. This study makes three major contributions by delving deeply into dense correspondence priors to provide existing frameworks with explicit geometric constraints. The first novelty is a contextual-geometric depth consistency loss, which employs depth maps triangulated from dense correspondences based on estimated ego-motion to guide the learning of depth perception from contextual information, since explicitly triangulated depth maps capture accurate relative distances among pixels. The second novelty arises from the observation that there exists an explicit, deducible relationship between optical flow divergence and depth gradient. A differential property correlation loss is, therefore, designed to refine depth estimation with a specific emphasis on local variations. The third novelty is a bidirectional stream co-adjustment strategy that enhances the interaction between rigid and optical flows, encouraging the former towards more accurate correspondence and making the latter more adaptable across various scenarios under the static scene hypotheses. DCPI-Depth, a framework that incorporates all these innovative components and couples two bidirectional and collaborative streams, achieves state-of-the-art performance and generalizability across multiple public datasets, outperforming all existing prior arts. Specifically, it demonstrates accurate depth estimation in texture-less and dynamic regions, and shows more reasonable smoothness.
5/28/2024