DoubleTake: Geometry Guided Depth Estimation
2406.18387
0
0
Abstract
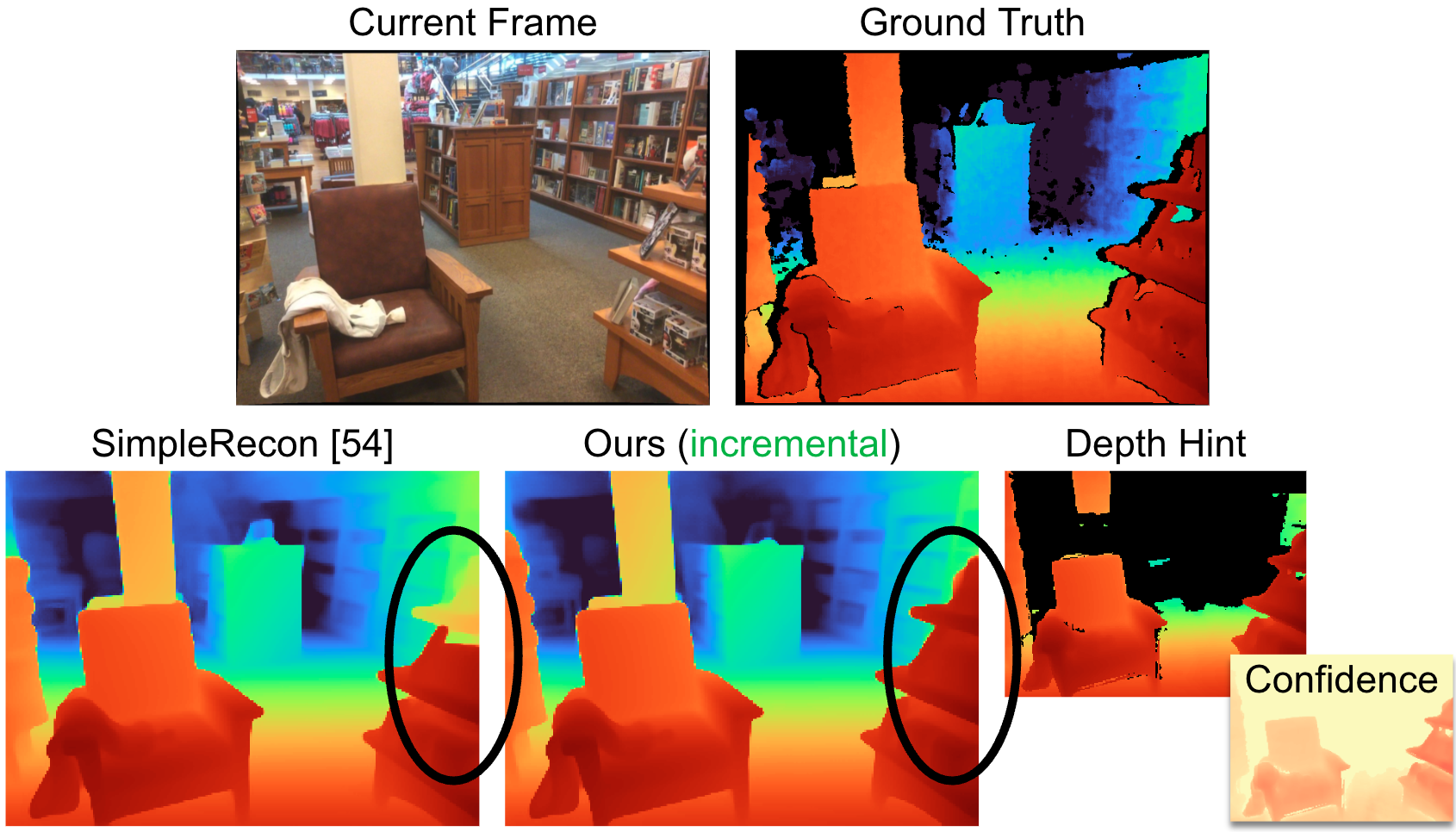
Estimating depth from a sequence of posed RGB images is a fundamental computer vision task, with applications in augmented reality, path planning etc. Prior work typically makes use of previous frames in a multi view stereo framework, relying on matching textures in a local neighborhood. In contrast, our model leverages historical predictions by giving the latest 3D geometry data as an extra input to our network. This self-generated geometric hint can encode information from areas of the scene not covered by the keyframes and it is more regularized when compared to individual predicted depth maps for previous frames. We introduce a Hint MLP which combines cost volume features with a hint of the prior geometry, rendered as a depth map from the current camera location, together with a measure of the confidence in the prior geometry. We demonstrate that our method, which can run at interactive speeds, achieves state-of-the-art estimates of depth and 3D scene reconstruction in both offline and incremental evaluation scenarios.
Create account to get full access
Overview
- Introduces a novel depth estimation approach called "DoubleTake" that leverages geometric cues to improve depth prediction
- Combines multiple depth estimation techniques, including self-supervised learning and geometric reasoning, to produce high-quality depth maps
- Demonstrates state-of-the-art performance on standard depth estimation benchmarks
Plain English Explanation
DoubleTake: Geometry Guided Depth Estimation presents a new method for estimating the depth of objects in an image. Depth estimation is the process of determining how far away different parts of a scene are from the camera.
The key innovation of DoubleTake is that it combines two different approaches to depth estimation: self-supervised learning and geometric reasoning. Self-supervised learning allows the system to learn depth prediction without requiring expensive manual annotations. Geometric reasoning leverages the inherent 3D structure of a scene to guide the depth estimation process.
By blending these complementary techniques, DoubleTake is able to produce high-quality depth maps that outperform other state-of-the-art depth estimation methods. This can be useful for a variety of applications, such as 3D scene reconstruction, object tracking, and depth-aware image editing.
The researchers demonstrate DoubleTake's effectiveness on standard depth estimation benchmarks, showing that it can accurately predict depth with less training data than previous approaches. This suggests that the combination of self-supervision and geometric reasoning is a promising direction for improving the state of the art in depth estimation.
Technical Explanation
DoubleTake: Geometry Guided Depth Estimation introduces a novel depth estimation framework that leverages both self-supervised learning and geometric reasoning to produce high-quality depth maps.
The self-supervised component of DoubleTake allows the system to learn depth prediction from unlabeled data, by exploiting naturally occurring geometric constraints between multiple views of a scene. This avoids the need for expensive manual depth annotations, which can be a significant bottleneck for training depth estimation models.
The geometric reasoning component of DoubleTake further improves depth estimation by incorporating explicit 3D structural information about the scene. This is achieved by learning to predict surface normals and analyzing the consistency of depth estimates across different viewpoints.
By combining these two complementary approaches, DoubleTake is able to outperform previous state-of-the-art depth estimation methods on standard benchmarks. The researchers demonstrate that DoubleTake can achieve high-quality depth prediction using less training data than other self-supervised techniques, such as MDiff and Depth Prompting.
The authors also present a detailed ablation study, which explores the individual contributions of the self-supervised and geometric reasoning components to DoubleTake's overall performance. This provides valuable insights into the relative importance of each aspect of the framework and how they work together to improve depth estimation.
Critical Analysis
The DoubleTake: Geometry Guided Depth Estimation paper presents a compelling approach to depth estimation that combines self-supervised learning and geometric reasoning. The results demonstrate significant improvements over previous state-of-the-art methods, suggesting that this hybrid approach is a promising direction for the field.
One potential limitation of the work is that it relies on the availability of multiple views of the same scene, which may not always be practical or feasible in real-world scenarios. While the authors show that DoubleTake can achieve good performance with relatively few views, it would be interesting to explore how the framework might be adapted to work with single-view depth estimation tasks as well.
Additionally, the paper does not provide a detailed analysis of the computational and memory requirements of the DoubleTake system, which could be an important consideration for deployment in resource-constrained environments, such as on mobile devices or embedded systems. Exploring the trade-offs between model complexity, inference speed, and depth estimation accuracy would be a valuable area for further research.
Overall, the DoubleTake: Geometry Guided Depth Estimation paper presents a compelling and innovative approach to depth estimation that merits further investigation and development. By combining self-supervision and geometric reasoning, the authors have demonstrated the potential to significantly advance the state of the art in this important computer vision task.
Conclusion
DoubleTake: Geometry Guided Depth Estimation introduces a novel depth estimation framework that leverages both self-supervised learning and geometric reasoning to produce high-quality depth maps. By blending these complementary techniques, the authors have shown that DoubleTake can outperform previous state-of-the-art methods on standard benchmarks, while requiring less training data.
The key innovations of DoubleTake include its ability to learn depth prediction from unlabeled data through self-supervision, and its incorporation of explicit 3D geometric information to guide the depth estimation process. These advancements have the potential to significantly impact a wide range of applications that rely on accurate depth perception, such as 3D scene reconstruction, object tracking, and depth-aware image editing.
While the paper presents compelling results, further research is needed to explore the practical limitations and deployment considerations of the DoubleTake framework, such as its applicability to single-view depth estimation and its computational efficiency. Nonetheless, the authors' innovative approach to blending self-supervision and geometric reasoning represents an important step forward in the field of depth estimation and computer vision as a whole.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
📉
M${^2}$Depth: Self-supervised Two-Frame Multi-camera Metric Depth Estimation
Yingshuang Zou, Yikang Ding, Xi Qiu, Haoqian Wang, Haotian Zhang
0
0
This paper presents a novel self-supervised two-frame multi-camera metric depth estimation network, termed M${^2}$Depth, which is designed to predict reliable scale-aware surrounding depth in autonomous driving. Unlike the previous works that use multi-view images from a single time-step or multiple time-step images from a single camera, M${^2}$Depth takes temporally adjacent two-frame images from multiple cameras as inputs and produces high-quality surrounding depth. We first construct cost volumes in spatial and temporal domains individually and propose a spatial-temporal fusion module that integrates the spatial-temporal information to yield a strong volume presentation. We additionally combine the neural prior from SAM features with internal features to reduce the ambiguity between foreground and background and strengthen the depth edges. Extensive experimental results on nuScenes and DDAD benchmarks show M${^2}$Depth achieves state-of-the-art performance. More results can be found in https://heiheishuang.xyz/M2Depth .
5/6/2024

Depth Prompting for Sensor-Agnostic Depth Estimation
Jin-Hwi Park, Chanhwi Jeong, Junoh Lee, Hae-Gon Jeon
0
0
Dense depth maps have been used as a key element of visual perception tasks. There have been tremendous efforts to enhance the depth quality, ranging from optimization-based to learning-based methods. Despite the remarkable progress for a long time, their applicability in the real world is limited due to systematic measurement biases such as density, sensing pattern, and scan range. It is well-known that the biases make it difficult for these methods to achieve their generalization. We observe that learning a joint representation for input modalities (e.g., images and depth), which most recent methods adopt, is sensitive to the biases. In this work, we disentangle those modalities to mitigate the biases with prompt engineering. For this, we design a novel depth prompt module to allow the desirable feature representation according to new depth distributions from either sensor types or scene configurations. Our depth prompt can be embedded into foundation models for monocular depth estimation. Through this embedding process, our method helps the pretrained model to be free from restraint of depth scan range and to provide absolute scale depth maps. We demonstrate the effectiveness of our method through extensive evaluations. Source code is publicly available at https://github.com/JinhwiPark/DepthPrompting .
5/21/2024
🔄
Enhanced Object Tracking by Self-Supervised Auxiliary Depth Estimation Learning
Zhenyu Wei, Yujie He, Zhanchuan Cai
0
0
RGB-D tracking significantly improves the accuracy of object tracking. However, its dependency on real depth inputs and the complexity involved in multi-modal fusion limit its applicability across various scenarios. The utilization of depth information in RGB-D tracking inspired us to propose a new method, named MDETrack, which trains a tracking network with an additional capability to understand the depth of scenes, through supervised or self-supervised auxiliary Monocular Depth Estimation learning. The outputs of MDETrack's unified feature extractor are fed to the side-by-side tracking head and auxiliary depth estimation head, respectively. The auxiliary module will be discarded in inference, thus keeping the same inference speed. We evaluated our models with various training strategies on multiple datasets, and the results show an improved tracking accuracy even without real depth. Through these findings we highlight the potential of depth estimation in enhancing object tracking performance.
5/24/2024

Uncertainty and Self-Supervision in Single-View Depth
Javier Rodriguez-Puigvert
0
0
Single-view depth estimation refers to the ability to derive three-dimensional information per pixel from a single two-dimensional image. Single-view depth estimation is an ill-posed problem because there are multiple depth solutions that explain 3D geometry from a single view. While deep neural networks have been shown to be effective at capturing depth from a single view, the majority of current methodologies are deterministic in nature. Accounting for uncertainty in the predictions can avoid disastrous consequences when applied to fields such as autonomous driving or medical robotics. We have addressed this problem by quantifying the uncertainty of supervised single-view depth for Bayesian deep neural networks. There are scenarios, especially in medicine in the case of endoscopic images, where such annotated data is not available. To alleviate the lack of data, we present a method that improves the transition from synthetic to real domain methods. We introduce an uncertainty-aware teacher-student architecture that is trained in a self-supervised manner, taking into account the teacher uncertainty. Given the vast amount of unannotated data and the challenges associated with capturing annotated depth in medical minimally invasive procedures, we advocate a fully self-supervised approach that only requires RGB images and the geometric and photometric calibration of the endoscope. In endoscopic imaging, the camera and light sources are co-located at a small distance from the target surfaces. This setup indicates that brighter areas of the image are nearer to the camera, while darker areas are further away. Building on this observation, we exploit the fact that for any given albedo and surface orientation, pixel brightness is inversely proportional to the square of the distance. We propose the use of illumination as a strong single-view self-supervisory signal for deep neural networks.
6/21/2024