MetaUrban: A Simulation Platform for Embodied AI in Urban Spaces

0

Sign in to get full access
Overview
- Introduces MetaUrban, a simulation platform for embodied AI in urban spaces
- Aims to enable research on embodied AI agents that can navigate and interact within realistic urban environments
- Leverages photorealistic 3D models, physics-based simulations, and multimodal sensor data to create a comprehensive training and evaluation framework
Plain English Explanation
MetaUrban is a simulation platform that allows researchers to develop and test embodied AI agents in realistic urban environments. These agents are designed to navigate and interact with the physical world, just like humans do. The platform uses detailed 3D models of cities, realistic physics simulations, and sensor data to create a comprehensive virtual world for training and evaluating these AI systems.
By providing a realistic and comprehensive testing ground, MetaUrban aims to accelerate the development of embodied AI agents that can efficiently explore smart scenes and align the cyber and physical worlds. This could lead to advancements in areas like safer roadways and immersive digital twins and human-centered building and embodied delivery.
Technical Explanation
MetaUrban is designed to enable research on embodied AI agents that can navigate and interact within realistic urban environments. The platform leverages photorealistic 3D models, physics-based simulations, and multimodal sensor data to create a comprehensive training and evaluation framework for these agents.
The platform includes detailed 3D models of city environments, with accurate representations of buildings, roads, pedestrians, and other urban elements. These models are integrated with physics-based simulations that realistically model the behaviors of objects, agents, and environmental conditions within the virtual world.
In addition to the 3D environment, MetaUrban also provides a rich set of multimodal sensor data, including RGB-D cameras, LiDAR, and GPS/IMU sensors. This data can be used to train and evaluate AI agents' perception, navigation, and interaction capabilities within the urban setting.
The MetaUrban platform is designed to be flexible and extensible, allowing researchers to customize the environment, agent capabilities, and evaluation tasks to suit their specific research needs. This enables the exploration of a wide range of embodied AI research questions, from efficient exploration of smart scenes to aligning cyber and physical spaces.
Critical Analysis
The MetaUrban platform represents a significant advancement in the field of embodied AI research, providing a comprehensive and realistic simulation environment for developing and testing these systems. However, there are a few potential limitations and areas for further research:
-
Fidelity of Simulation: While the platform aims to provide a photorealistic and physics-based simulation, there may still be some discrepancies between the virtual world and the real-world urban environments. Further research is needed to ensure the simulation accurately captures the complexities and nuances of real-world urban settings.
-
Diversity of Scenarios: The current implementation of MetaUrban may focus on a specific set of urban environments or scenarios. Expanding the diversity of the simulated environments and use cases could enhance the platform's applicability and the generalizability of the developed embodied AI agents.
-
Multimodal Sensor Integration: While MetaUrban provides a rich set of multimodal sensor data, there may be opportunities to further integrate and fuse this information to improve the agents' perception and decision-making capabilities.
-
Scalability and Performance: As the complexity of the simulated environments and the sophistication of the embodied AI agents increase, there may be challenges in maintaining the platform's scalability and computational performance. Addressing these issues could be an important area of future research.
Overall, the MetaUrban platform represents a significant step forward in the field of embodied AI research, providing a comprehensive and realistic testbed for developing and evaluating these systems. By addressing the potential limitations and expanding the platform's capabilities, researchers can further advance the state-of-the-art in embodied AI for efficient exploration and multimodal interaction and manipulation.
Conclusion
The MetaUrban platform is a valuable tool for accelerating the development of embodied AI agents that can navigate and interact within realistic urban environments. By leveraging detailed 3D models, physics-based simulations, and multimodal sensor data, the platform provides a comprehensive testbed for researchers to explore a wide range of embodied AI research questions.
The potential advancements enabled by MetaUrban could have significant implications for fields like safer roadways and immersive digital twins, human-centered building and embodied delivery, and the broader integration of cyber and physical spaces. As researchers continue to push the boundaries of embodied AI, platforms like MetaUrban will play a crucial role in driving these advancements forward.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
MetaUrban: A Simulation Platform for Embodied AI in Urban Spaces
Wayne Wu, Honglin He, Yiran Wang, Chenda Duan, Jack He, Zhizheng Liu, Quanyi Li, Bolei Zhou
Public urban spaces like streetscapes and plazas serve residents and accommodate social life in all its vibrant variations. Recent advances in Robotics and Embodied AI make public urban spaces no longer exclusive to humans. Food delivery bots and electric wheelchairs have started sharing sidewalks with pedestrians, while diverse robot dogs and humanoids have recently emerged in the street. Ensuring the generalizability and safety of these forthcoming mobile machines is crucial when navigating through the bustling streets in urban spaces. In this work, we present MetaUrban, a compositional simulation platform for Embodied AI research in urban spaces. MetaUrban can construct an infinite number of interactive urban scenes from compositional elements, covering a vast array of ground plans, object placements, pedestrians, vulnerable road users, and other mobile agents' appearances and dynamics. We design point navigation and social navigation tasks as the pilot study using MetaUrban for embodied AI research and establish various baselines of Reinforcement Learning and Imitation Learning. Experiments demonstrate that the compositional nature of the simulated environments can substantially improve the generalizability and safety of the trained mobile agents. MetaUrban will be made publicly available to provide more research opportunities and foster safe and trustworthy embodied AI in urban spaces.
Read more7/12/2024
0
Human-centered In-building Embodied Delivery Benchmark
Zhuoqun Xu, Yang Liu, Xiaoqi Li, Jiyao Zhang, Hao Dong
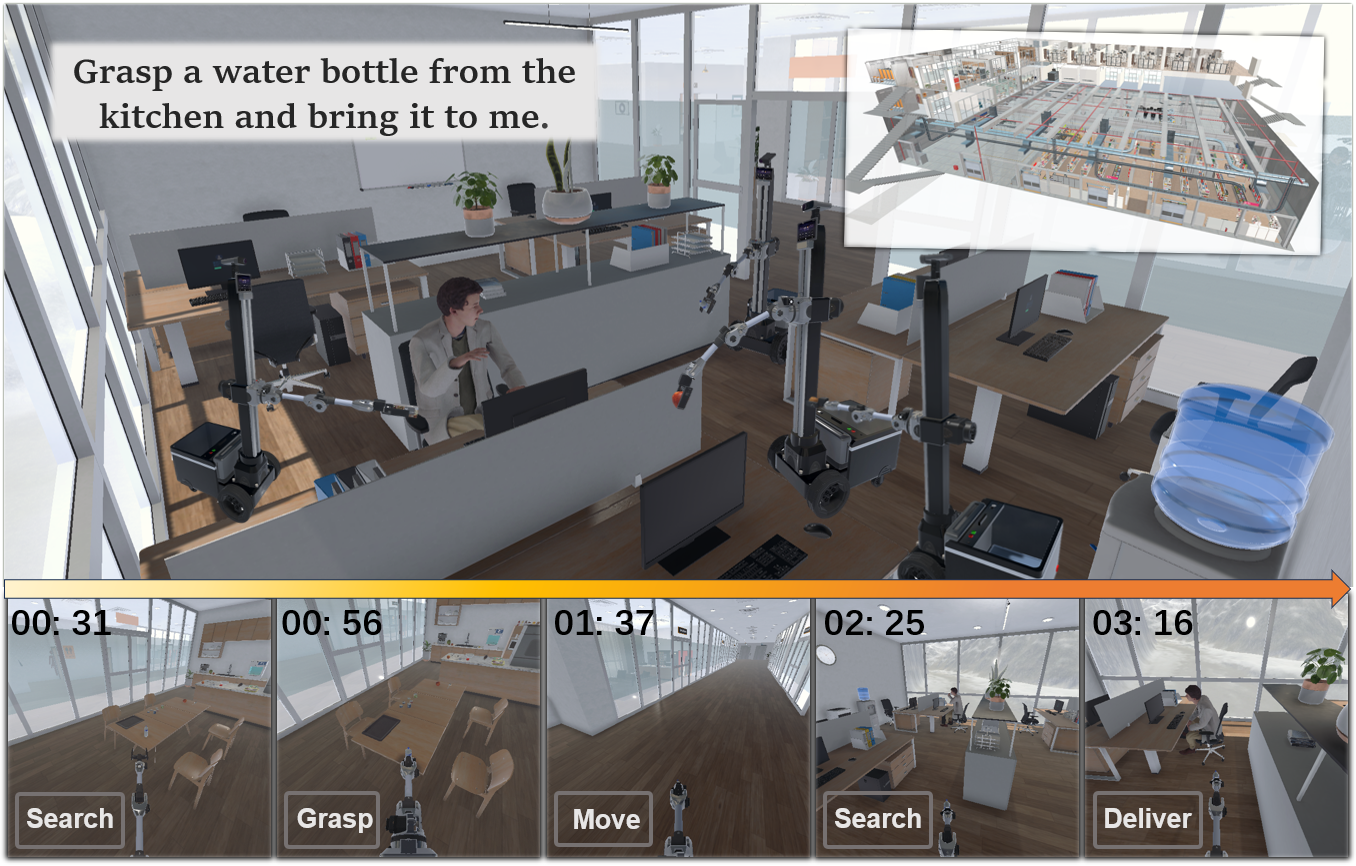
Recently, the concept of embodied intelligence has been widely accepted and popularized, leading people to naturally consider the potential for commercialization in this field. In this work, we propose a specific commercial scenario simulation, human-centered in-building embodied delivery. Furthermore, for this scenario, we have developed a brand-new virtual environment system from scratch, constructing a multi-level connected building space modeled after a polar research station. This environment also includes autonomous human characters and robots with grasping and mobility capabilities, as well as a large number of interactive items. Based on this environment, we have built a delivery dataset containing 13k language instructions to guide robots in providing services. We simulate human behavior through human characters and sample their various needs in daily life. Finally, we proposed a method centered around a large multimodal model to serve as the baseline system for this dataset. Compared to past embodied data work, our work focuses on a virtual environment centered around human-robot interaction for commercial scenarios. We believe this will bring new perspectives and exploration angles to the embodied community.
Read more6/27/2024

0
Aligning Cyber Space with Physical World: A Comprehensive Survey on Embodied AI
Yang Liu, Weixing Chen, Yongjie Bai, Guanbin Li, Wen Gao, Liang Lin
Embodied Artificial Intelligence (Embodied AI) is crucial for achieving Artificial General Intelligence (AGI) and serves as a foundation for various applications that bridge cyberspace and the physical world. Recently, the emergence of Multi-modal Large Models (MLMs) and World Models (WMs) have attracted significant attention due to their remarkable perception, interaction, and reasoning capabilities, making them a promising architecture for the brain of embodied agents. However, there is no comprehensive survey for Embodied AI in the era of MLMs. In this survey, we give a comprehensive exploration of the latest advancements in Embodied AI. Our analysis firstly navigates through the forefront of representative works of embodied robots and simulators, to fully understand the research focuses and their limitations. Then, we analyze four main research targets: 1) embodied perception, 2) embodied interaction, 3) embodied agent, and 4) sim-to-real adaptation, covering the state-of-the-art methods, essential paradigms, and comprehensive datasets. Additionally, we explore the complexities of MLMs in virtual and real embodied agents, highlighting their significance in facilitating interactions in dynamic digital and physical environments. Finally, we summarize the challenges and limitations of embodied AI and discuss their potential future directions. We hope this survey will serve as a foundational reference for the research community and inspire continued innovation. The associated project can be found at https://github.com/HCPLab-SYSU/Embodied_AI_Paper_List.
Read more7/23/2024

0
Metaverse for Safer Roadways: An Immersive Digital Twin Framework for Exploring Human-Autonomy Coexistence in Urban Transportation Systems
Tanmay Vilas Samak, Chinmay Vilas Samak, Venkat Narayan Krovi
Societal-scale deployment of autonomous vehicles requires them to coexist with human drivers, necessitating mutual understanding and coordination among these entities. However, purely real-world or simulation-based experiments cannot be employed to explore such complex interactions due to safety and reliability concerns, respectively. Consequently, this work presents an immersive digital twin framework to explore and experiment with the interaction dynamics between autonomous and non-autonomous traffic participants. Particularly, we employ a mixed-reality human-machine interface to allow human drivers and autonomous agents to observe and interact with each other for testing edge-case scenarios while ensuring safety at all times. To validate the versatility of the proposed framework's modular architecture, we first present a discussion on a set of user experience experiments encompassing 4 different levels of immersion with 4 distinct user interfaces. We then present a case study of uncontrolled intersection traversal to demonstrate the efficacy of the proposed framework in validating the interactions of a primary human-driven, autonomous, and connected autonomous vehicle with a secondary semi-autonomous vehicle. The proposed framework has been openly released to guide the future of autonomy-oriented digital twins and research on human-autonomy coexistence.
Read more9/11/2024