MHRC: Closed-loop Decentralized Multi-Heterogeneous Robot Collaboration with Large Language Models

0

Sign in to get full access
Overview
- This paper presents a novel approach to closed-loop decentralized multi-heterogeneous robot collaboration using large language models.
- The proposed system enables robots with diverse capabilities to collaborate effectively on complex tasks in an ad-hoc manner.
- The key innovations include a decentralized coordination mechanism and the integration of large language models for robust communication and task planning.
Plain English Explanation
The paper describes a system that allows different types of robots to work together efficiently on complicated tasks, even if they weren't originally designed to collaborate. The core idea is to use advanced language models, which are AI systems trained on vast amounts of text data, to help the robots communicate and coordinate their actions in a decentralized way.
Decentralized coordination means the robots don't need a central controller telling them what to do. Instead, they can make decisions independently based on the information they get from the language models and their interactions with each other. This makes the system more flexible and resilient to changing conditions or unexpected events.
The language models act as a kind of common ground, allowing the robots to understand each other and coordinate their actions, even if they have very different physical capabilities. This enables them to tackle complex multi-step tasks in a coherent and efficient way.
Technical Explanation
The paper proposes a closed-loop decentralized multi-heterogeneous robot collaboration (MHRC) system that utilizes large language models (LLMs) for robust task planning and coordination.
The key components of the system are:
-
Decentralized Coordination: The robots coordinate their actions in a decentralized manner, without a central controller. Each robot makes local decisions based on its own observations and interactions with the LLM.
-
Language Model Integration: The LLM is used to facilitate communication, shared understanding, and task planning among the heterogeneous robots. The LLM provides a common grounding for the robots to understand each other's capabilities and intentions.
-
Closed-Loop Control: The system operates in a closed-loop fashion, with the robots continuously sensing the environment, updating their internal models, and adjusting their actions accordingly. This allows the system to adapt to dynamic changes in the task or environment.
The authors evaluate the proposed MHRC system in simulation and demonstrate its effectiveness in coordinating teams of robots with diverse capabilities to accomplish complex multi-step tasks. The results show that the LLM-based decentralized approach outperforms traditional centralized planning methods in terms of task completion time and robustness to failures.
Critical Analysis
The paper presents a promising approach to enable flexible and adaptive multi-robot collaboration using large language models. The decentralized coordination mechanism and closed-loop control loop are well-designed to handle the challenges of heterogeneous robot teams and dynamic environments.
However, the authors acknowledge several limitations and areas for future work:
-
Real-world Deployment: The system is evaluated in simulation, and the authors note that real-world deployment may introduce additional challenges, such as sensor noise, communication delays, and physical constraints.
-
Scalability: The performance of the system as the number of robots or task complexity increases is not fully explored. Scalability may become a concern as the team size or task requirements grow.
-
Robustness to Failures: While the system is designed to be robust to individual robot failures, the impact of multiple concurrent failures or unexpected events on the overall system performance is not thoroughly investigated.
-
Interpretability and Transparency: As with many LLM-based systems, the internal decision-making process of the robots may be difficult to interpret and explain, which could limit the system's trustworthiness and adoption in safety-critical applications.
Future research should address these limitations and explore ways to enhance the system's robustness, scalability, and transparency, paving the way for real-world deployments of decentralized multi-robot collaboration systems powered by large language models.
Conclusion
This paper presents a novel approach to closed-loop decentralized multi-heterogeneous robot collaboration that leverages large language models. The key innovations include a decentralized coordination mechanism and the integration of LLMs for robust communication and task planning among robots with diverse capabilities.
The proposed system demonstrates promising results in simulation, outperforming traditional centralized planning methods in terms of task completion time and robustness to failures. However, the authors acknowledge several limitations, such as the need for real-world validation, improved scalability, and enhanced interpretability of the system's decision-making process.
Overall, this research represents an important step forward in enabling flexible and adaptive multi-robot collaboration, with potential applications in a wide range of domains, from search and rescue operations to factory automation. The continued development and refinement of these LLM-based decentralized systems could significantly advance the field of robotics and lead to more intelligent and collaborative robot teams that can tackle increasingly complex tasks.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
MHRC: Closed-loop Decentralized Multi-Heterogeneous Robot Collaboration with Large Language Models
Wenhao Yu, Jie Peng, Yueliang Ying, Sai Li, Jianmin Ji, Yanyong Zhang
The integration of large language models (LLMs) with robotics has significantly advanced robots' abilities in perception, cognition, and task planning. The use of natural language interfaces offers a unified approach for expressing the capability differences of heterogeneous robots, facilitating communication between them, and enabling seamless task allocation and collaboration. Currently, the utilization of LLMs to achieve decentralized multi-heterogeneous robot collaborative tasks remains an under-explored area of research. In this paper, we introduce a novel framework that utilizes LLMs to achieve decentralized collaboration among multiple heterogeneous robots. Our framework supports three robot categories, mobile robots, manipulation robots, and mobile manipulation robots, working together to complete tasks such as exploration, transportation, and organization. We developed a rich set of textual feedback mechanisms and chain-of-thought (CoT) prompts to enhance task planning efficiency and overall system performance. The mobile manipulation robot can adjust its base position flexibly, ensuring optimal conditions for grasping tasks. The manipulation robot can comprehend task requirements, seek assistance when necessary, and handle objects appropriately. Meanwhile, the mobile robot can explore the environment extensively, map object locations, and communicate this information to the mobile manipulation robot, thus improving task execution efficiency. We evaluated the framework using PyBullet, creating scenarios with three different room layouts and three distinct operational tasks. We tested various LLM models and conducted ablation studies to assess the contributions of different modules. The experimental results confirm the effectiveness and necessity of our proposed framework.
Read more9/27/2024

0
Leveraging Large Language Model for Heterogeneous Ad Hoc Teamwork Collaboration
Xinzhu Liu, Peiyan Li, Wenju Yang, Di Guo, Huaping Liu
Compared with the widely investigated homogeneous multi-robot collaboration, heterogeneous robots with different capabilities can provide a more efficient and flexible collaboration for more complex tasks. In this paper, we consider a more challenging heterogeneous ad hoc teamwork collaboration problem where an ad hoc robot joins an existing heterogeneous team for a shared goal. Specifically, the ad hoc robot collaborates with unknown teammates without prior coordination, and it is expected to generate an appropriate cooperation policy to improve the efficiency of the whole team. To solve this challenging problem, we leverage the remarkable potential of the large language model (LLM) to establish a decentralized heterogeneous ad hoc teamwork collaboration framework that focuses on generating reasonable policy for an ad hoc robot to collaborate with original heterogeneous teammates. A training-free hierarchical dynamic planner is developed using the LLM together with the newly proposed Interactive Reflection of Thoughts (IRoT) method for the ad hoc agent to adapt to different teams. We also build a benchmark testing dataset to evaluate the proposed framework in the heterogeneous ad hoc multi-agent tidying-up task. Extensive comparison and ablation experiments are conducted in the benchmark to demonstrate the effectiveness of the proposed framework. We have also employed the proposed framework in physical robots in a real-world scenario. The experimental videos can be found at https://youtu.be/wHYP5T2WIp0.
Read more6/19/2024
📈
0
Enhancing the LLM-Based Robot Manipulation Through Human-Robot Collaboration
Haokun Liu, Yaonan Zhu, Kenji Kato, Atsushi Tsukahara, Izumi Kondo, Tadayoshi Aoyama, Yasuhisa Hasegawa
Large Language Models (LLMs) are gaining popularity in the field of robotics. However, LLM-based robots are limited to simple, repetitive motions due to the poor integration between language models, robots, and the environment. This paper proposes a novel approach to enhance the performance of LLM-based autonomous manipulation through Human-Robot Collaboration (HRC). The approach involves using a prompted GPT-4 language model to decompose high-level language commands into sequences of motions that can be executed by the robot. The system also employs a YOLO-based perception algorithm, providing visual cues to the LLM, which aids in planning feasible motions within the specific environment. Additionally, an HRC method is proposed by combining teleoperation and Dynamic Movement Primitives (DMP), allowing the LLM-based robot to learn from human guidance. Real-world experiments have been conducted using the Toyota Human Support Robot for manipulation tasks. The outcomes indicate that tasks requiring complex trajectory planning and reasoning over environments can be efficiently accomplished through the incorporation of human demonstrations.
Read more7/2/2024
0
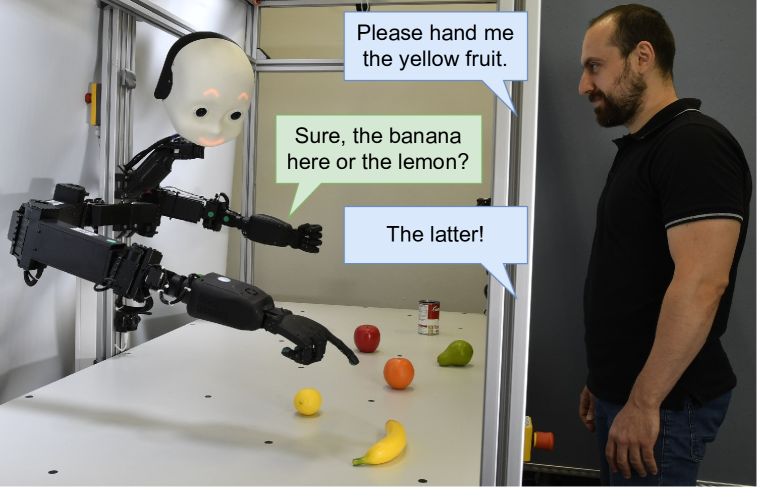
When Robots Get Chatty: Grounding Multimodal Human-Robot Conversation and Collaboration
Philipp Allgeuer, Hassan Ali, Stefan Wermter
We investigate the use of Large Language Models (LLMs) to equip neural robotic agents with human-like social and cognitive competencies, for the purpose of open-ended human-robot conversation and collaboration. We introduce a modular and extensible methodology for grounding an LLM with the sensory perceptions and capabilities of a physical robot, and integrate multiple deep learning models throughout the architecture in a form of system integration. The integrated models encompass various functions such as speech recognition, speech generation, open-vocabulary object detection, human pose estimation, and gesture detection, with the LLM serving as the central text-based coordinating unit. The qualitative and quantitative results demonstrate the huge potential of LLMs in providing emergent cognition and interactive language-oriented control of robots in a natural and social manner.
Read more7/2/2024