Micro-Macro Spatial-Temporal Graph-based Encoder-Decoder for Map-Constrained Trajectory Recovery

0

Sign in to get full access
Overview
- This paper presents a novel spatial-temporal graph-based encoder-decoder model for map-constrained trajectory recovery.
- The model incorporates both micro-semantics (local context) and macro-semantics (global context) to improve the accuracy of trajectory prediction.
- The authors leverage graph neural networks to effectively capture the spatial-temporal dependencies in the trajectory data.
- Experiments on real-world datasets demonstrate the superior performance of the proposed approach compared to state-of-the-art methods.
Plain English Explanation
The paper describes a new machine learning model for predicting the paths that people or vehicles might take as they move through a city or other environment. This is an important task, as accurately forecasting trajectories can have applications in areas like transportation planning, location-based services, and autonomous vehicle navigation.
The key innovation of this work is the use of a spatial-temporal graph-based encoder-decoder architecture. This means the model represents the environment as a graph, with nodes representing specific locations and edges representing the connections between them. The model then learns to encode the trajectory data into a compact representation, and use that representation to decode or predict future trajectory segments.
What makes this model unique is that it incorporates both micro-semantics and macro-semantics. Micro-semantics refer to the local context around a particular location, like the nearby roads, buildings, and other features. Macro-semantics capture the broader, global structure of the environment, like the overall road network and how different areas of the city are connected.
By blending these micro and macro perspectives, the model is able to make more accurate trajectory predictions compared to previous approaches. The authors demonstrate the effectiveness of their method on real-world transportation datasets, showing significant improvements over state-of-the-art techniques.
Technical Explanation
The proposed Micro-Macro Spatial-Temporal Graph-based Encoder-Decoder (MM-STGD) model leverages a graph neural network (GNN) architecture to capture the spatial-temporal dependencies in trajectory data. The model consists of an encoder that converts the input trajectory into a compact representation, and a decoder that uses this representation to generate the predicted future trajectory.
The key innovation is the incorporation of both micro-semantics and macro-semantics into the model. The micro-semantics component models the local context around each location in the trajectory, such as the nearby roads, buildings, and other contextual features. The macro-semantics component captures the broader, global structure of the environment, such as the overall road network and how different areas are connected.
To implement this, the authors construct a spatial-temporal graph representation of the environment, where nodes correspond to locations and edges represent the connections between them. They then design a multi-scale GNN module that can effectively encode both the micro and macro-level information into the trajectory representation.
The encoder-decoder architecture is trained end-to-end using a dataset of historical trajectory data. During inference, the encoder takes the observed portion of a trajectory as input and outputs a latent representation. The decoder then uses this representation to generate the predicted future trajectory, taking into account the map constraints of the environment.
Experiments on real-world transportation datasets demonstrate the superior performance of the MM-STGD model compared to state-of-the-art methods, including NLP-Enabled Trajectory Map Matching for Urban Roads, STMGF: An Effective Spatial-Temporal Multi-Granularity Framework, Social Force Embedded Mixed Graph Convolutional Network, and SemanticFormer: Holistic Semantic Traffic Scene Representation for Trajectory Prediction. The authors attribute this performance gain to the effective integration of micro and macro-level information through the multi-scale GNN architecture.
Critical Analysis
The authors have presented a well-designed and rigorously evaluated model for map-constrained trajectory recovery. The incorporation of both micro and macro-semantics is a novel and promising approach, as it allows the model to capture the complex spatial-temporal dynamics of trajectory data at multiple scales.
However, one potential limitation of the study is the reliance on a single dataset for the evaluation. While the authors do compare against several state-of-the-art methods, it would be valuable to see the model's performance on a diverse set of trajectory datasets, potentially in different domains or environments. This would help establish the generalizability of the proposed approach.
Additionally, the paper does not provide much detail on the specific types of micro and macro-level features that were used in the experiments. A more thorough discussion of the feature engineering process and its impact on the model's performance would be informative for readers interested in replicating or extending this work.
Another area for further exploration could be the interpretability of the model's predictions. Since the graph neural network architecture can be quite complex, it would be interesting to see if the authors' approach can provide insights into the key factors driving the trajectory recovery process, beyond just the overall performance metrics.
Overall, the Micro-Macro Spatial-Temporal Graph-based Encoder-Decoder model represents an exciting advancement in the field of map-constrained trajectory prediction. The authors have demonstrated the value of integrating local and global context, and their work could inspire further research into multi-scale spatial-temporal modeling techniques.
Conclusion
This paper presents a novel spatial-temporal graph-based encoder-decoder model, called MM-STGD, for the task of map-constrained trajectory recovery. The key innovation of the model is the incorporation of both micro-semantics (local context) and macro-semantics (global context) to improve the accuracy of trajectory prediction.
The authors leverage graph neural networks to effectively capture the spatial-temporal dependencies in the trajectory data, and demonstrate the superior performance of their approach compared to state-of-the-art methods on real-world transportation datasets. This work highlights the importance of considering multi-scale contextual information for complex spatial-temporal prediction problems, and could have significant implications for applications such as transportation planning, location-based services, and autonomous vehicle navigation.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Micro-Macro Spatial-Temporal Graph-based Encoder-Decoder for Map-Constrained Trajectory Recovery
Tonglong Wei, Youfang Lin, Yan Lin, Shengnan Guo, Lan Zhang, Huaiyu Wan
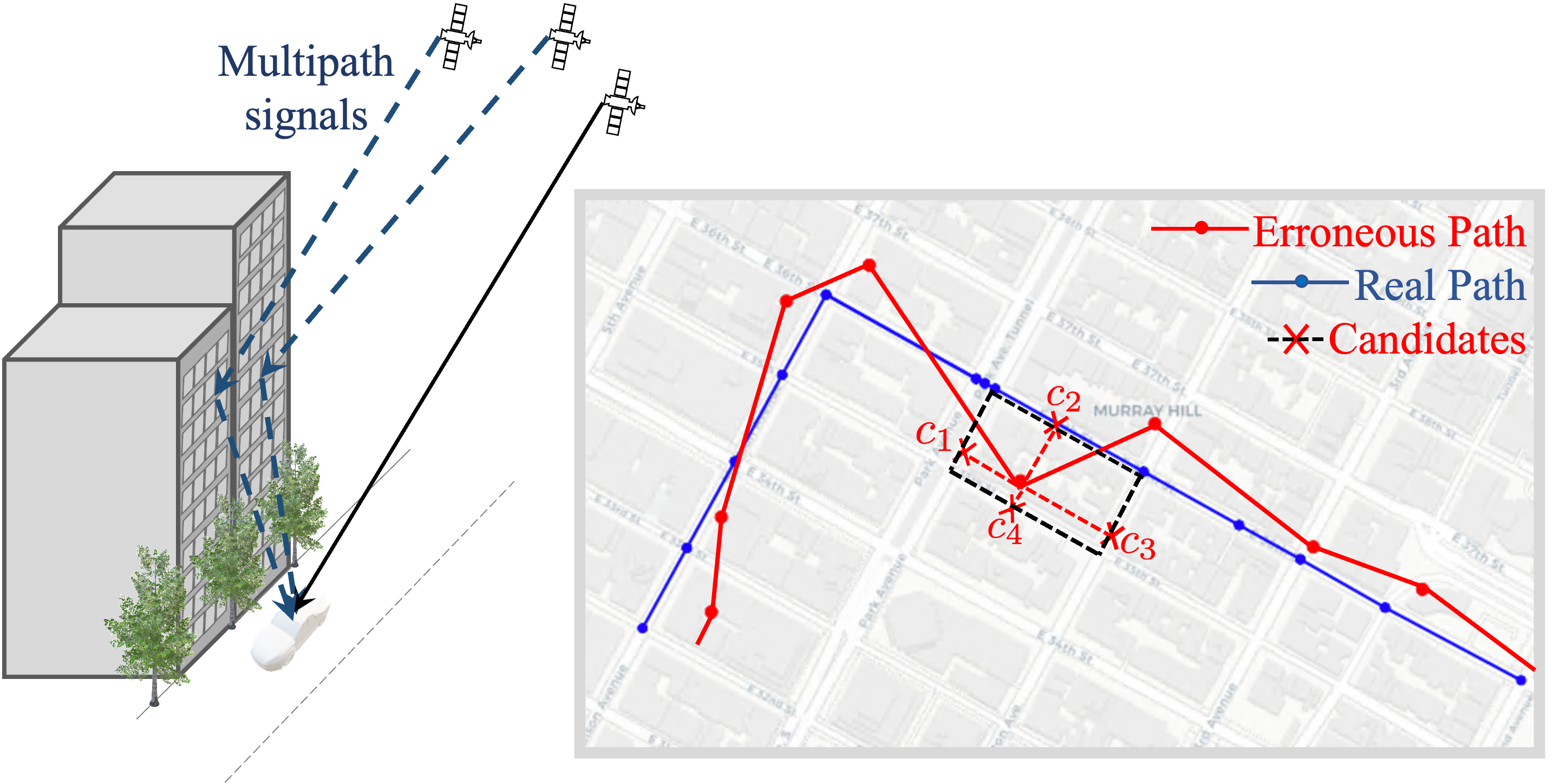
Recovering intermediate missing GPS points in a sparse trajectory, while adhering to the constraints of the road network, could offer deep insights into users' moving behaviors in intelligent transportation systems. Although recent studies have demonstrated the advantages of achieving map-constrained trajectory recovery via an end-to-end manner, they still face two significant challenges. Firstly, existing methods are mostly sequence-based models. It is extremely hard for them to comprehensively capture the micro-semantics of individual trajectory, including the information of each GPS point and the movement between two GPS points. Secondly, existing approaches ignore the impact of the macro-semantics, i.e., the road conditions and the people's shared travel preferences reflected by a group of trajectories. To address the above challenges, we propose a Micro-Macro Spatial-Temporal Graph-based Encoder-Decoder (MM-STGED). Specifically, we model each trajectory as a graph to efficiently describe the micro-semantics of trajectory and design a novel message-passing mechanism to learn trajectory representations. Additionally, we extract the macro-semantics of trajectories and further incorporate them into a well-designed graph-based decoder to guide trajectory recovery. Extensive experiments conducted on sparse trajectories with three different sampling intervals that are respectively constructed from two real-world trajectory datasets demonstrate the superiority of our proposed model.
Read more5/1/2024

0
Spatial-Temporal Graph Representation Learning for Tactical Networks Future State Prediction
Junhua Liu, Justin Albrethsen, Lincoln Goh, David Yau, Kwan Hui Lim
Resource allocation in tactical ad-hoc networks presents unique challenges due to their dynamic and multi-hop nature. Accurate prediction of future network connectivity is essential for effective resource allocation in such environments. In this paper, we introduce the Spatial-Temporal Graph Encoder-Decoder (STGED) framework for Tactical Communication Networks that leverages both spatial and temporal features of network states to learn latent tactical behaviors effectively. STGED hierarchically utilizes graph-based attention mechanism to spatially encode a series of communication network states, leverages a recurrent neural network to temporally encode the evolution of states, and a fully-connected feed-forward network to decode the connectivity in the future state. Through extensive experiments, we demonstrate that STGED consistently outperforms baseline models by large margins across different time-steps input, achieving an accuracy of up to 99.2% for the future state prediction task of tactical communication networks.
Read more7/16/2024
0
NLP-enabled trajectory map-matching in urban road networks using transformer sequence-to-sequence model
Sevin Mohammadi, Andrew W. Smyth
Large-scale geolocation telematics data acquired from connected vehicles has the potential to significantly enhance mobility infrastructures and operational systems within smart cities. To effectively utilize this data, it is essential to accurately match the geolocation data to the road segments. However, this matching is often not trivial due to the low sampling rate and errors exacerbated by multipath effects in urban environments. Traditionally, statistical modeling techniques such as Hidden-Markov models incorporating domain knowledge into the matching process have been extensively used for map-matching tasks. However, rule-based map-matching tasks are noise-sensitive and inefficient in processing large-scale trajectory data. Deep learning techniques directly learn the relationship between observed data and road networks from the data, often without the need for hand-crafted rules or domain knowledge. This renders them an efficient approach for map-matching large-scale datasets and makes them more robust to the noise. This paper introduces a sequence-to-sequence deep-learning model, specifically the transformer-based encoder-decoder model, to perform as a surrogate for map-matching algorithms. The encoder-decoder architecture initially encodes the series of noisy GPS points into a representation that automatically captures autoregressive behavior and spatial correlations between GPS points. Subsequently, the decoder associates data points with the road network features and thus transforms these representations into a sequence of road segments. The model is trained and evaluated using GPS traces collected in Manhattan, New York. Achieving an accuracy of 76%, transformer-based encoder-decoder models extensively employed in natural language processing presented a promising performance for translating noisy GPS data to the navigated routes in urban road networks.
Read more4/22/2024

0
Dynamic Graph Transformer with Correlated Spatial-Temporal Positional Encoding
Zhe Wang, Sheng Zhou, Jiawei Chen, Zhen Zhang, Binbin Hu, Yan Feng, Chun Chen, Can Wang
Learning effective representations for Continuous-Time Dynamic Graphs (CTDGs) has garnered significant research interest, largely due to its powerful capabilities in modeling complex interactions between nodes. A fundamental and crucial requirement for representation learning in CTDGs is the appropriate estimation and preservation of proximity. However, due to the sparse and evolving characteristics of CTDGs, the spatial-temporal properties inherent in high-order proximity remain largely unexplored. Despite its importance, this property presents significant challenges due to the computationally intensive nature of personalized interaction intensity estimation and the dynamic attributes of CTDGs. To this end, we propose a novel Correlated Spatial-Temporal Positional encoding that incorporates a parameter-free personalized interaction intensity estimation under the weak assumption of the Poisson Point Process. Building on this, we introduce the Dynamic Graph Transformer with Correlated Spatial-Temporal Positional Encoding (CorDGT), which efficiently retains the evolving spatial-temporal high-order proximity for effective node representation learning in CTDGs. Extensive experiments on seven small and two large-scale datasets demonstrate the superior performance and scalability of the proposed CorDGT.
Read more7/25/2024