NLP-enabled trajectory map-matching in urban road networks using transformer sequence-to-sequence model

0
Sign in to get full access
Overview
- This paper presents a novel approach to trajectory map-matching in urban road networks using a transformer sequence-to-sequence model.
- The researchers leverage natural language processing (NLP) techniques to tackle the challenging task of aligning GPS or GNSS (Global Navigation Satellite System) data with the underlying road network.
- The proposed model outperforms traditional map-matching methods, demonstrating the potential of NLP-based techniques for improving transportation and telematics applications.
Plain English Explanation
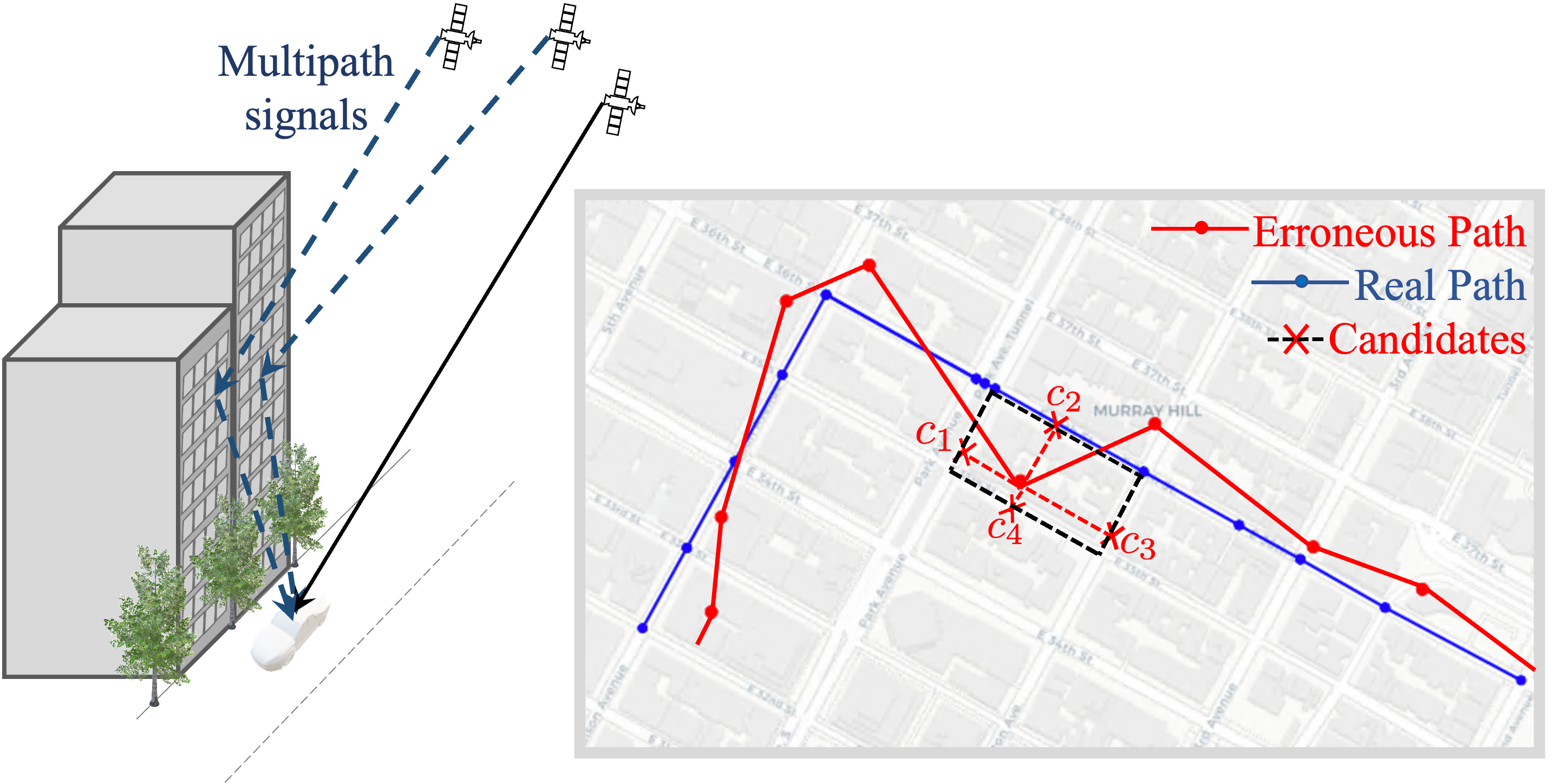
When you use a GPS or other satellite-based navigation system in a city, the device often struggles to accurately place your location on the correct road. This is known as the "map-matching" problem, and it can lead to confusion and inaccurate directions.
The researchers in this study tackled this problem by borrowing techniques from the field of natural language processing (NLP). NLP is the study of how computers can understand and process human language. The researchers realized that the problem of matching a sequence of GPS coordinates to the right road network is similar to the way NLP models translate one language to another.
To do this, they developed a special type of deep learning model called a "transformer sequence-to-sequence" model. This model takes in a sequence of GPS coordinates and outputs the corresponding sequence of road segments that the vehicle traveled on. By using this NLP-inspired approach, the researchers were able to significantly improve the accuracy of map-matching compared to traditional methods.
The significance of this work is that it demonstrates the power of borrowing ideas from one field (NLP) and applying them to solve problems in another domain (transportation and telematics). This cross-pollination of ideas is a hallmark of modern AI research and can lead to breakthroughs that wouldn't be possible by working within a single discipline.
Technical Explanation
The researchers propose a novel NLP-enabled trajectory map-matching approach that utilizes a transformer sequence-to-sequence model. The input to the model is a sequence of GPS or GNSS coordinates representing the trajectory of a vehicle, and the output is the corresponding sequence of road segments that the vehicle traveled on.
The transformer model leverages key concepts from recent advancements in natural language processing, such as the encoder-decoder architecture and self-attention mechanisms. These techniques enable the model to effectively capture the contextual relationships between the input GPS coordinates and the underlying road network.
The researchers also explore the ability of transformer-based models to learn quasi-geospatial concepts from the map-matching task, which could have broader implications for other transportation and telematics applications.
The model is trained using a contrastive learning framework that leverages both positive and negative examples to improve the model's ability to accurately match trajectories to the correct road network.
Experiments on real-world datasets demonstrate that the proposed NLP-enabled trajectory map-matching approach outperforms traditional methods, highlighting the potential of this technique for various transportation and telematics applications.
Critical Analysis
The paper presents a compelling approach to the map-matching problem, but a few potential limitations and areas for further research are worth considering:
-
The study is primarily focused on urban road networks, and the performance of the model in more rural or complex road environments is not extensively evaluated. Further research could explore the model's robustness in a wider range of geographical settings.
-
The paper does not provide a detailed analysis of the computational complexity and runtime performance of the transformer-based approach compared to other map-matching methods. Understanding the trade-offs between accuracy and efficiency would be valuable for practical deployment.
-
While the contrastive learning framework is shown to be effective, the specific mechanisms by which the model learns quasi-geospatial concepts could be further investigated. Deeper insights into the internal representations and decision-making processes of the model could lead to even more effective training strategies.
-
The study is limited to a single dataset, and validating the generalizability of the findings across diverse transportation datasets would strengthen the conclusions and potential impact of the research.
Overall, the paper demonstrates the powerful potential of leveraging NLP techniques for transportation and telematics applications, and the critical analysis highlights opportunities for further exploration and refinement of the proposed approach.
Conclusion
This paper presents a novel NLP-enabled trajectory map-matching approach that utilizes a transformer sequence-to-sequence model. By borrowing techniques from the field of natural language processing, the researchers were able to significantly improve the accuracy of aligning GPS or GNSS data with the underlying road network, compared to traditional map-matching methods.
The significance of this work lies in its ability to demonstrate the cross-pollination of ideas between seemingly disparate fields, such as transportation and natural language processing. The success of the transformer-based approach highlights the potential for continued advancements in transportation and telematics applications through the integration of cutting-edge AI and machine learning techniques.
As the use of GPS and other location-based technologies continues to grow, improving map-matching accuracy will be crucial for providing reliable and efficient navigation and logistics services. The findings of this paper suggest that NLP-inspired models could play a key role in addressing this challenge and pave the way for further innovations in the transportation and telematics domains.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
NLP-enabled trajectory map-matching in urban road networks using transformer sequence-to-sequence model
Sevin Mohammadi, Andrew W. Smyth
Large-scale geolocation telematics data acquired from connected vehicles has the potential to significantly enhance mobility infrastructures and operational systems within smart cities. To effectively utilize this data, it is essential to accurately match the geolocation data to the road segments. However, this matching is often not trivial due to the low sampling rate and errors exacerbated by multipath effects in urban environments. Traditionally, statistical modeling techniques such as Hidden-Markov models incorporating domain knowledge into the matching process have been extensively used for map-matching tasks. However, rule-based map-matching tasks are noise-sensitive and inefficient in processing large-scale trajectory data. Deep learning techniques directly learn the relationship between observed data and road networks from the data, often without the need for hand-crafted rules or domain knowledge. This renders them an efficient approach for map-matching large-scale datasets and makes them more robust to the noise. This paper introduces a sequence-to-sequence deep-learning model, specifically the transformer-based encoder-decoder model, to perform as a surrogate for map-matching algorithms. The encoder-decoder architecture initially encodes the series of noisy GPS points into a representation that automatically captures autoregressive behavior and spatial correlations between GPS points. Subsequently, the decoder associates data points with the road network features and thus transforms these representations into a sequence of road segments. The model is trained and evaluated using GPS traces collected in Manhattan, New York. Achieving an accuracy of 76%, transformer-based encoder-decoder models extensively employed in natural language processing presented a promising performance for translating noisy GPS data to the navigated routes in urban road networks.
Read more4/22/2024
📊
0
Translating Images to Road Network: A Sequence-to-Sequence Perspective
Jiachen Lu, Renyuan Peng, Xinyue Cai, Hang Xu, Feng Wen, Wei Zhang, Li Zhang
The extraction of road network is essential for the generation of high-definition maps since it enables the precise localization of road landmarks and their interconnections. However, generating road network poses a significant challenge due to the conflicting underlying combination of Euclidean (e.g., road landmarks location) and non-Euclidean (e.g., road topological connectivity) structures. Existing methods struggle to merge the two types of data domains effectively, but few of them address it properly. Instead, our work establishes a unified representation of both types of data domain by projecting both Euclidean and non-Euclidean data into an integer series called RoadNet Sequence. Further than modeling an auto-regressive sequence-to-sequence Transformer model to understand RoadNet Sequence, we decouple the dependency of RoadNet Sequence into a mixture of auto-regressive and non-autoregressive dependency. Building on this, our proposed non-autoregressive sequence-to-sequence approach leverages non-autoregressive dependencies while fixing the gap towards auto-regressive dependencies, resulting in success on both efficiency and accuracy. We further identify two main bottlenecks in the current RoadNetTransformer on a non-overfitting split of the dataset: poor landmark detection limited by the BEV Encoder and error propagation to topology reasoning. Therefore, we propose Topology-Inherited Training to inherit better topology knowledge into RoadNetTransformer. Additionally, we collect SD-Maps from open-source map datasets and use this prior information to significantly improve landmark detection and reachability. Extensive experiments on nuScenes dataset demonstrate the superiority of RoadNet Sequence representation and the non-autoregressive approach compared to existing state-of-the-art alternatives.
Read more9/4/2024

0
Learning Lane Graphs from Aerial Imagery Using Transformers
Martin Buchner, Simon Dorer, Abhinav Valada
The robust and safe operation of automated vehicles underscores the critical need for detailed and accurate topological maps. At the heart of this requirement is the construction of lane graphs, which provide essential information on lane connectivity, vital for navigating complex urban environments autonomously. While transformer-based models have been effective in creating map topologies from vehicle-mounted sensor data, their potential for generating such graphs from aerial imagery remains untapped. This work introduces a novel approach to generating successor lane graphs from aerial imagery, utilizing the advanced capabilities of transformer models. We frame successor lane graphs as a collection of maximal length paths and predict them using a Detection Transformer (DETR) architecture. We demonstrate the efficacy of our method through extensive experiments on the diverse and large-scale UrbanLaneGraph dataset, illustrating its accuracy in generating successor lane graphs and highlighting its potential for enhancing autonomous vehicle navigation in complex environments.
Read more7/9/2024

0
Spatial and social situation-aware transformer-based trajectory prediction of autonomous systems
Kathrin Donandt, Dirk Soffker
Autonomous transportation systems such as road vehicles or vessels require the consideration of the static and dynamic environment to dislocate without collision. Anticipating the behavior of an agent in a given situation is required to adequately react to it in time. Developing deep learning-based models has become the dominant approach to motion prediction recently. The social environment is often considered through a CNN-LSTM-based sub-module processing a $textit{social tensor}$ that includes information of the past trajectory of surrounding agents. For the proposed transformer-based trajectory prediction model, an alternative, computationally more efficient social tensor definition and processing is suggested. It considers the interdependencies between target and surrounding agents at each time step directly instead of relying on information of last hidden LSTM states of individually processed agents. A transformer-based sub-module, the Social Tensor Transformer, is integrated into the overall prediction model. It is responsible for enriching the target agent's dislocation features with social interaction information obtained from the social tensor. For the awareness of spatial limitations, dislocation features are defined in relation to the navigable area. This replaces additional, computationally expensive map processing sub-modules. An ablation study shows, that for longer prediction horizons, the deviation of the predicted trajectory from the ground truth is lower compared to a spatially and socially agnostic model. Even if the performance gain from a spatial-only to a spatial and social context-sensitive model is small in terms of common error measures, by visualizing the results it can be shown that the proposed model in fact is able to predict reactions to surrounding agents and explicitely allows an interpretable behavior.
Read more6/6/2024