Model-based Offline Quantum Reinforcement Learning
2404.10017
0
0

Abstract
This paper presents the first algorithm for model-based offline quantum reinforcement learning and demonstrates its functionality on the cart-pole benchmark. The model and the policy to be optimized are each implemented as variational quantum circuits. The model is trained by gradient descent to fit a pre-recorded data set. The policy is optimized with a gradient-free optimization scheme using the return estimate given by the model as the fitness function. This model-based approach allows, in principle, full realization on a quantum computer during the optimization phase and gives hope that a quantum advantage can be achieved as soon as sufficiently powerful quantum computers are available.
Create account to get full access
Overview
- Presents a model-based offline quantum reinforcement learning approach
- Aims to overcome the challenges of online quantum reinforcement learning
- Leverages a model of the environment to learn optimal policies without interacting with the real environment
Plain English Explanation
This research paper proposes a new method for training quantum reinforcement learning agents without directly interacting with the environment. The key idea is to first learn a model of the environment, and then use that model to train the agent offline, without needing to take actions in the real world.
This is in contrast to traditional online quantum reinforcement learning, which requires the agent to directly interact with the environment and learn from the resulting rewards and observations. The model-based approach can be advantageous in situations where real-world interaction is difficult, dangerous, or expensive - for example, training an agent to control a quantum device.
By learning a model of the environment, the agent can explore different strategies and policies in simulation, without risking damage to the actual system. The paper shows how this model-based offline approach can be effective at training powerful quantum reinforcement learning agents.
Technical Explanation
The paper presents a model-based reinforcement learning approach for quantum systems. The key components are:
-
Environment Model: The agent first learns a model of the environment dynamics, using data collected from previous interactions. This model can predict the next state and reward given the current state and action.
-
Offline Policy Optimization: With the environment model in hand, the agent can then optimize its policy
offline , without needing to actually interact with the real environment. This is done using techniques like warm-start variational quantum policy iteration or model-predictive control-based value estimation. -
Deployment: Once the policy is learned, it can be deployed on the real quantum system, leveraging techniques like automatic re-calibration of quantum devices to handle any discrepancies between the model and reality.
The main advantage of this approach is that it can overcome the challenges of reinforcement learning for quantum circuit design, where direct interaction with the environment may be difficult or impossible.
Critical Analysis
The authors acknowledge several limitations and avenues for future work. For example, the accuracy of the environment model is crucial, and techniques for learning highly accurate models of quantum systems remain an open challenge. Additionally, the offline policy optimization process may be computationally expensive, especially for large and complex quantum environments.
Further research is needed to better understand the tradeoffs between model-based and model-free approaches in the quantum reinforcement learning domain. The authors also note the potential for this technique to be combined with other methods, such as hierarchical or meta-learning, to further improve its effectiveness.
Conclusion
This paper presents a novel model-based offline quantum reinforcement learning approach that aims to overcome the challenges of direct interaction with quantum environments. By learning an environment model and then optimizing policies in simulation, the method can enable effective training of quantum agents without the risks and difficulties of online interaction.
While the approach has some limitations, it represents an important step forward in the field of quantum reinforcement learning and opens up new avenues for further research and development in this rapidly evolving area of study.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
🛠️
A Study on Optimization Techniques for Variational Quantum Circuits in Reinforcement Learning
Michael Kolle, Timo Witter, Tobias Rohe, Gerhard Stenzel, Philipp Altmann, Thomas Gabor
0
0
Quantum Computing aims to streamline machine learning, making it more effective with fewer trainable parameters. This reduction of parameters can speed up the learning process and reduce the use of computational resources. However, in the current phase of quantum computing development, known as the noisy intermediate-scale quantum era (NISQ), learning is difficult due to a limited number of qubits and widespread quantum noise. To overcome these challenges, researchers are focusing on variational quantum circuits (VQCs). VQCs are hybrid algorithms that merge a quantum circuit, which can be adjusted through parameters, with traditional classical optimization techniques. These circuits require only few qubits for effective learning. Recent studies have presented new ways of applying VQCs to reinforcement learning, showing promising results that warrant further exploration. This study investigates the effects of various techniques -- data re-uploading, input scaling, output scaling -- and introduces exponential learning rate decay in the quantum proximal policy optimization algorithm's actor-VQC. We assess these methods in the popular Frozen Lake and Cart Pole environments. Our focus is on their ability to reduce the number of parameters in the VQC without losing effectiveness. Our findings indicate that data re-uploading and an exponential learning rate decay significantly enhance hyperparameter stability and overall performance. While input scaling does not improve parameter efficiency, output scaling effectively manages greediness, leading to increased learning speed and robustness.
5/22/2024

Equivariant Offline Reinforcement Learning
Arsh Tangri, Ondrej Biza, Dian Wang, David Klee, Owen Howell, Robert Platt
0
0
Sample efficiency is critical when applying learning-based methods to robotic manipulation due to the high cost of collecting expert demonstrations and the challenges of on-robot policy learning through online Reinforcement Learning (RL). Offline RL addresses this issue by enabling policy learning from an offline dataset collected using any behavioral policy, regardless of its quality. However, recent advancements in offline RL have predominantly focused on learning from large datasets. Given that many robotic manipulation tasks can be formulated as rotation-symmetric problems, we investigate the use of $SO(2)$-equivariant neural networks for offline RL with a limited number of demonstrations. Our experimental results show that equivariant versions of Conservative Q-Learning (CQL) and Implicit Q-Learning (IQL) outperform their non-equivariant counterparts. We provide empirical evidence demonstrating how equivariance improves offline learning algorithms in the low-data regime.
6/21/2024
New!Tackling Long-Horizon Tasks with Model-based Offline Reinforcement Learning
Kwanyoung Park, Youngwoon Lee
0
0
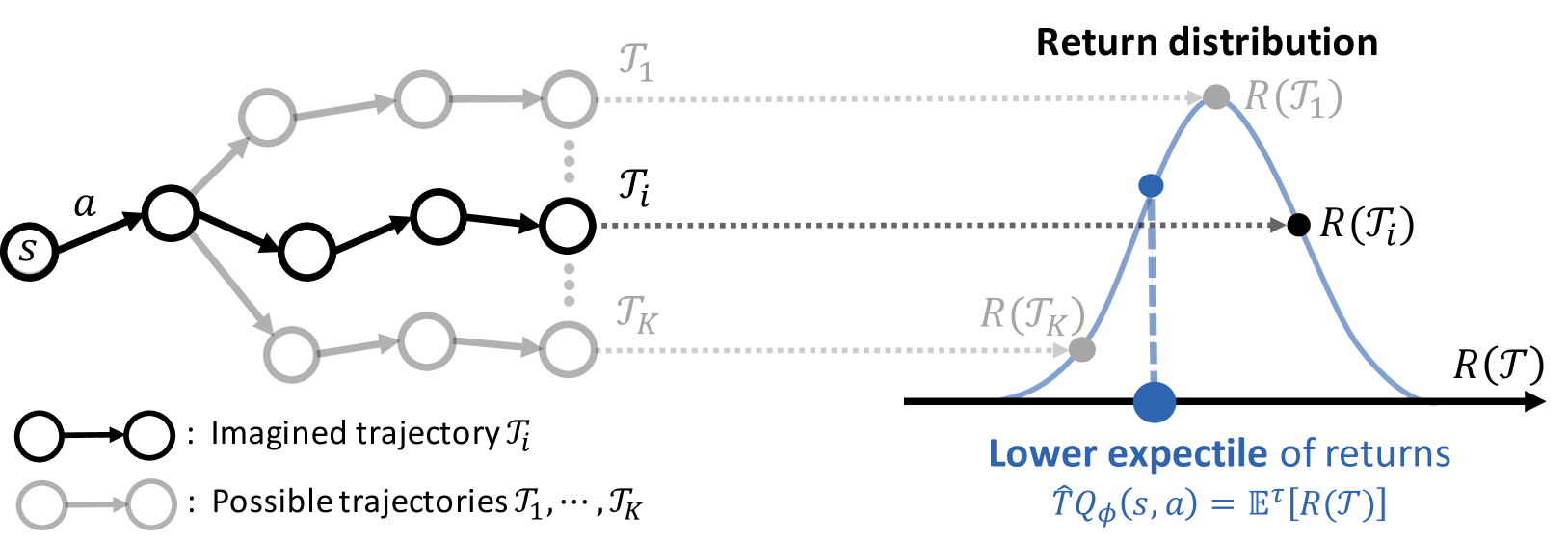
Model-based offline reinforcement learning (RL) is a compelling approach that addresses the challenge of learning from limited, static data by generating imaginary trajectories using learned models. However, it falls short in solving long-horizon tasks due to high bias in value estimation from model rollouts. In this paper, we introduce a novel model-based offline RL method, Lower Expectile Q-learning (LEQ), which enhances long-horizon task performance by mitigating the high bias in model-based value estimation via expectile regression of $lambda$-returns. Our empirical results show that LEQ significantly outperforms previous model-based offline RL methods on long-horizon tasks, such as the D4RL AntMaze tasks, matching or surpassing the performance of model-free approaches. Our experiments demonstrate that expectile regression, $lambda$-returns, and critic training on offline data are all crucial for addressing long-horizon tasks. Additionally, LEQ achieves performance comparable to the state-of-the-art model-based and model-free offline RL methods on the NeoRL benchmark and the D4RL MuJoCo Gym tasks.
7/2/2024
📊
Efficient Policy Evaluation with Offline Data Informed Behavior Policy Design
Shuze Liu, Shangtong Zhang
0
0
Most reinforcement learning practitioners evaluate their policies with online Monte Carlo estimators for either hyperparameter tuning or testing different algorithmic design choices, where the policy is repeatedly executed in the environment to get the average outcome. Such massive interactions with the environment are prohibitive in many scenarios. In this paper, we propose novel methods that improve the data efficiency of online Monte Carlo estimators while maintaining their unbiasedness. We first propose a tailored closed-form behavior policy that provably reduces the variance of an online Monte Carlo estimator. We then design efficient algorithms to learn this closed-form behavior policy from previously collected offline data. Theoretical analysis is provided to characterize how the behavior policy learning error affects the amount of reduced variance. Compared with previous works, our method achieves better empirical performance in a broader set of environments, with fewer requirements for offline data.
6/3/2024