Modeling Kinematic Uncertainty of Tendon-Driven Continuum Robots via Mixture Density Networks
2404.04241
0
0
Abstract
Tendon-driven continuum robot kinematic models are frequently computationally expensive, inaccurate due to unmodeled effects, or both. In particular, unmodeled effects produce uncertainties that arise during the robot's operation that lead to variability in the resulting geometry. We propose a novel solution to these issues through the development of a Gaussian mixture kinematic model. We train a mixture density network to output a Gaussian mixture model representation of the robot geometry given the current tendon displacements. This model computes a probability distribution that is more representative of the true distribution of geometries at a given configuration than a model that outputs a single geometry, while also reducing the computation time. We demonstrate one use of this model through a trajectory optimization method that explicitly reasons about the workspace uncertainty to minimize the probability of collision.
Create account to get full access
Overview
- This paper presents a novel method for modeling the kinematic uncertainty of tendon-driven continuum robots using a Mixture Density Network (MDN) approach.
- Tendon-driven continuum robots are a type of flexible robotic manipulator that are commonly used in various applications, such as medical procedures and search and rescue operations.
- The proposed MDN-based approach can capture the complex, non-Gaussian uncertainty distributions in the robot's kinematic parameters, which is crucial for accurate motion planning and control.
Plain English Explanation
Continuum robots are a type of flexible robot that can bend and move in many different directions, like a snake. They are often used in medical procedures or for searching in disaster areas because they can squeeze into tight spaces. However, it can be challenging to predict exactly how these robots will move because there is a lot of uncertainty in their mechanics.
The researchers in this paper developed a new way to model this uncertainty using a Mixture Density Network (MDN). An MDN is a type of machine learning model that can capture complex, non-Gaussian (i.e. not bell-shaped) probability distributions. By training an MDN on data from the continuum robot, the researchers were able to create a model that could predict the likely range of positions the robot's tip might reach, rather than just a single, deterministic prediction.
This is important because it allows the robot's movements to be planned more accurately and safely, especially in sensitive applications like medical procedures. Rather than assuming the robot will move in a simple, predictable way, the MDN-based model can account for the inherent variability and unpredictability in the robot's behavior. This could lead to improvements in the reliability and performance of continuum robots in the real world.
Technical Explanation
The paper presents a Mixture Density Network (MDN) [link to "Quantifying Uncertainty in Motion Prediction via Variational Bayesian Mixture Modeling"] approach for modeling the kinematic uncertainty of tendon-driven continuum robots. Continuum robots [link to "Accounting for Hysteresis in Forward Kinematics of Nonlinearly Routed Tendon-Driven Continuum Robots"] are a class of flexible manipulators that can bend and deform in complex ways, allowing them to navigate through tight spaces. However, their high degree of flexibility also introduces significant uncertainty in their kinematic behavior, which is crucial to account for in motion planning and control.
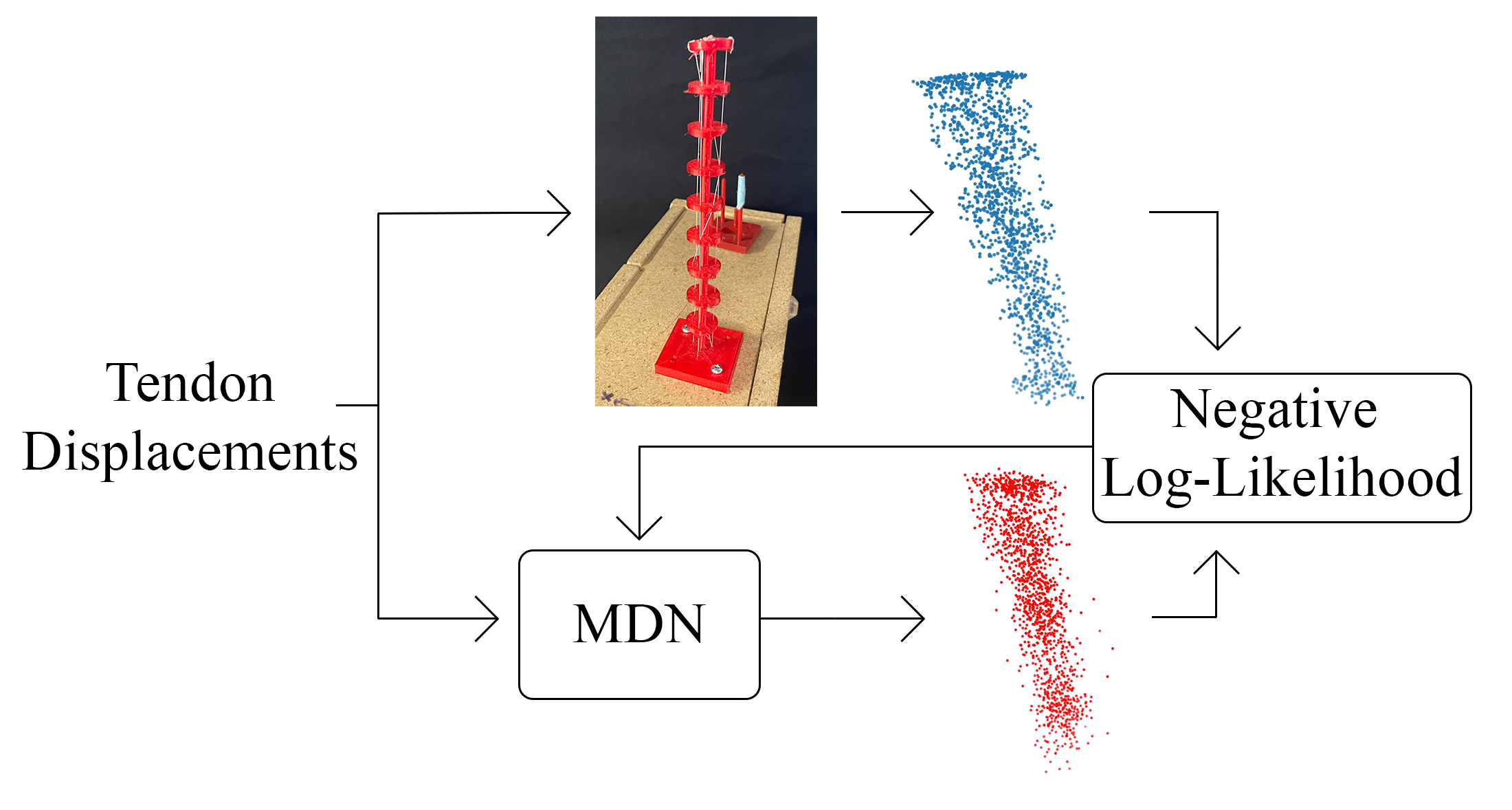
The proposed MDN-based model learns to predict the probability distribution of the robot's end-effector pose given the tendon inputs, rather than just a single, deterministic prediction. This allows the model to capture the complex, non-Gaussian uncertainty patterns that arise from factors like manufacturing tolerances, tendon routing, and external disturbances. The authors demonstrate the effectiveness of their approach through experiments on a tendon-driven continuum robot, showing that the MDN outperforms standard regression models in terms of predictive accuracy and uncertainty quantification.
The key technical contributions of the paper include:
- Formulating the kinematic uncertainty modeling problem as a Mixture Density Network regression task
- Deriving the loss function and training procedure for the MDN-based model
- Validating the proposed approach through extensive experiments on a real continuum robot platform
Critical Analysis
The paper presents a well-designed and thorough investigation of using Mixture Density Networks to model the kinematic uncertainty of tendon-driven continuum robots. The authors' choice of the MDN approach is justified by the complex, non-Gaussian nature of the uncertainty in this type of robotic system, which cannot be adequately captured by standard regression models.
One potential limitation of the work is the reliance on a single continuum robot platform for the experiments. While the authors demonstrate the effectiveness of their method on this specific robot, it would be valuable to evaluate the approach on a wider range of continuum robot designs and configurations to assess its generalizability. [link to "Scaling Motion Forecasting Models via Ensemble Distillation"]
Additionally, the paper does not address the computational complexity and real-time performance of the proposed MDN-based model, which could be an important consideration for practical deployment of the technique, especially in applications like medical robotics where fast and reliable predictions are critical. [link to "Combining Reinforcement Learning and Tensor Networks for Application to Continuum Robots"]
Finally, the authors acknowledge that their approach assumes the availability of accurate sensor data for training the MDN model. In real-world scenarios, sensor noise and other sources of uncertainty may introduce additional challenges that are not fully explored in this work. [link to "Distributionally Robust Policy Learning with Lyapunov Certificate"]
Overall, the paper makes a valuable contribution to the field of continuum robot modeling and uncertainty quantification, and the proposed MDN-based approach appears to be a promising direction for further research and development in this area.
Conclusion
This paper presents a novel method for modeling the kinematic uncertainty of tendon-driven continuum robots using a Mixture Density Network (MDN) approach. The proposed MDN-based model is able to capture the complex, non-Gaussian uncertainty distributions in the robot's kinematic parameters, which is crucial for accurate motion planning and control.
The key advantages of the MDN-based approach are its ability to predict the probability distribution of the robot's end-effector pose, rather than just a single, deterministic prediction, and its potential to improve the reliability and performance of continuum robots in real-world applications, such as medical procedures and search and rescue operations.
While the paper demonstrates the effectiveness of the proposed method through experiments on a specific continuum robot platform, further research is needed to assess its generalizability and computational efficiency for practical deployment. Additionally, the impact of sensor noise and other sources of uncertainty on the model's performance should be explored in future work.
Overall, this research represents an important step forward in the field of continuum robot modeling and uncertainty quantification, and the insights and techniques presented in the paper could inspire further advancements in this area.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers

Accounting for Hysteresis in the Forward Kinematics of Nonlinearly-Routed Tendon-Driven Continuum Robots via a Learned Deep Decoder Network
Brian Y. Cho, Daniel S. Esser, Jordan Thompson, Bao Thach, Robert J. Webster III, Alan Kuntz
0
0
Tendon-driven continuum robots have been gaining popularity in medical applications due to their ability to curve around complex anatomical structures, potentially reducing the invasiveness of surgery. However, accurate modeling is required to plan and control the movements of these flexible robots. Physics-based models have limitations due to unmodeled effects, leading to mismatches between model prediction and actual robot shape. Recently proposed learning-based methods have been shown to overcome some of these limitations but do not account for hysteresis, a significant source of error for these robots. To overcome these challenges, we propose a novel deep decoder neural network that predicts the complete shape of tendon-driven robots using point clouds as the shape representation, conditioned on prior configurations to account for hysteresis. We evaluate our method on a physical tendon-driven robot and show that our network model accurately predicts the robot's shape, significantly outperforming a state-of-the-art physics-based model and a learning-based model that does not account for hysteresis.
4/8/2024

Using Neural Networks to Model Hysteretic Kinematics in Tendon-Actuated Continuum Robots
Yuan Wang, Max McCandless, Abdulhamit Donder, Giovanni Pittiglio, Behnam Moradkhani, Yash Chitalia, Pierre E. Dupont
0
0
The ability to accurately model mechanical hysteretic behavior in tendon-actuated continuum robots using deep learning approaches is a growing area of interest. In this paper, we investigate the hysteretic response of two types of tendon-actuated continuum robots and, ultimately, compare three types of neural network modeling approaches with both forward and inverse kinematic mappings: feedforward neural network (FNN), FNN with a history input buffer, and long short-term memory (LSTM) network. We seek to determine which model best captures temporal dependent behavior. We find that, depending on the robot's design, choosing different kinematic inputs can alter whether hysteresis is exhibited by the system. Furthermore, we present the results of the model fittings, revealing that, in contrast to the standard FNN, both FNN with a history input buffer and the LSTM model exhibit the capacity to model historical dependence with comparable performance in capturing rate-dependent hysteresis.
4/11/2024
🔮
Joint torques prediction of a robotic arm using neural networks
Giulia d'Addato, Ruggero Carli, Eurico Pedrosa, Artur Pereira, Luigi Palopoli, Daniele Fontanelli
0
0
Accurate dynamic models are crucial for many robotic applications. Traditional approaches to deriving these models are based on the application of Lagrangian or Newtonian mechanics. Although these methods provide a good insight into the physical behaviour of the system, they rely on the exact knowledge of parameters such as inertia, friction and joint flexibility. In addition, the system is often affected by uncertain and nonlinear effects, such as saturation and dead zones, which can be difficult to model. A popular alternative is the application of Machine Learning (ML) techniques - e.g., Neural Networks (NNs) - in the context of a black-box methodology. This paper reports on our experience with this approach for a real-life 6 degrees of freedom (DoF) manipulator. Specifically, we considered several NN architectures: single NN, multiple NNs, and cascade NN. We compared the performance of the system by using different policies for selecting the NN hyperparameters. Our experiments reveal that the best accuracy and performance are obtained by a cascade NN, in which we encode our prior physical knowledge about the dependencies between joints, complemented by an appropriate optimisation of the hyperparameters.
5/3/2024
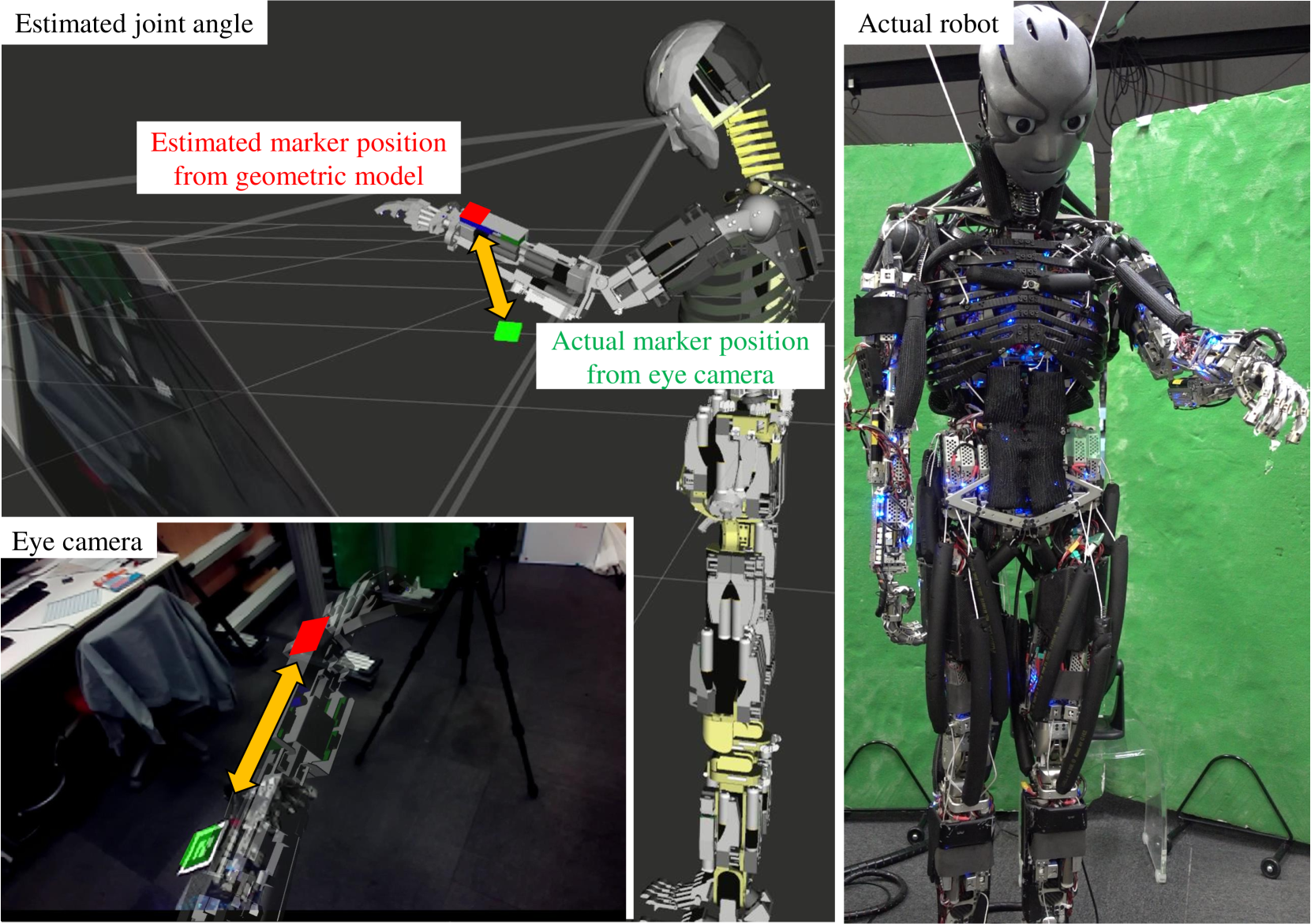
Online Learning of Joint-Muscle Mapping Using Vision in Tendon-driven Musculoskeletal Humanoids
Kento Kawaharazuka, Shogo Makino, Masaya Kawamura, Yuki Asano, Kei Okada, Masayuki Inaba
0
0
The body structures of tendon-driven musculoskeletal humanoids are complex, and accurate modeling is difficult, because they are made by imitating the body structures of human beings. For this reason, we have not been able to move them accurately like ordinary humanoids driven by actuators in each axis, and large internal muscle tension and slack of tendon wires have emerged by the model error between its geometric model and the actual robot. Therefore, we construct a joint-muscle mapping (JMM) using a neural network (NN), which expresses a nonlinear relationship between joint angles and muscle lengths, and aim to move tendon-driven musculoskeletal humanoids accurately by updating the JMM online from data of the actual robot. In this study, the JMM is updated online by using the vision of the robot so that it moves to the correct position (Vision Updater). Also, we execute another update to modify muscle antagonisms correctly (Antagonism Updater). By using these two updaters, the error between the target and actual joint angles decrease to about 40% in 5 minutes, and we show through a manipulation experiment that the tendon-driven musculoskeletal humanoid Kengoro becomes able to move as intended. This novel system can adapt to the state change and growth of robots, because it updates the JMM online successively.
4/9/2024