Using Neural Networks to Model Hysteretic Kinematics in Tendon-Actuated Continuum Robots

0

Sign in to get full access
Overview
- This paper explores the use of neural networks to model the hysteretic kinematics (nonlinear relationships between inputs and outputs) in tendon-actuated continuum robots.
- Continuum robots are a type of flexible robot that can bend and twist, often inspired by biological structures like tentacles or elephant trunks.
- Hysteresis, where the robot's shape depends on its history of movements, makes the kinematics difficult to model accurately using traditional methods.
- The authors propose using neural networks to capture this complex, path-dependent behavior, which could improve control and planning for continuum robots.
Plain English Explanation
Continuum robots are a lot like flexible tentacles or trunks that can bend and twist in all sorts of ways. But figuring out exactly how they'll move based on the forces applied to them is tricky. This is because the robots have a property called "hysteresis," which means their shape doesn't just depend on the current forces, but also on their history of movements.
<a href="https://aimodels.fyi/papers/arxiv/accounting-hysteresis-forward-kinematics-nonlinearly-routed-tendon">Accounting for hysteresis in continuum robots</a> is a major challenge, and the authors of this paper think neural networks could be a good solution. Neural networks are a type of machine learning model that can learn complex, nonlinear relationships from data. The idea is to train a neural network on examples of the robot's movements, so it can learn to predict the robot's shape based on both the current forces and its history.
This could be a big improvement over traditional modeling techniques, which struggle to capture the full complexity of hysteresis. By using neural networks, the researchers hope to develop continuum robots that are more reliable, precise, and easy to control. This could unlock new applications for these flexible, adaptable robots in areas like search and rescue, surgery, and human-robot interaction.
Technical Explanation
The key technical insight of this paper is to use <a href="https://aimodels.fyi/papers/arxiv/modeling-kinematic-uncertainty-tendon-driven-continuum-robots">neural networks to model the hysteretic kinematics</a> of tendon-actuated continuum robots. Continuum robots are a class of flexible, bioinspired manipulators that can achieve complex, three-dimensional shapes by bending and twisting. However, their kinematics (the relationship between actuator inputs and robot shape) are highly nonlinear and path-dependent due to the phenomenon of hysteresis.
To address this challenge, the authors propose a neural network-based approach that can capture the full hysteretic behavior of the robot. They develop a neural network architecture that takes as input the current tendon lengths and the robot's deformation history, and outputs predictions of the robot's shape. This allows the model to account for the path-dependent nature of the kinematics, which is not possible with traditional kinematic models.
The authors validate their approach through extensive <a href="https://aimodels.fyi/papers/arxiv/hysteresis-compensation-flexible-continuum-manipulator-using-rgbd">experimental evaluation</a>, training and testing the neural network on data collected from a physical continuum robot. They demonstrate that the neural network model significantly outperforms classical kinematic models in terms of accuracy, especially for highly deformed robot configurations where hysteresis is most prominent.
Critical Analysis
The authors provide a thorough and well-designed study, with a clear technical approach and robust experimental validation. However, a few potential limitations and areas for future work are worth noting:
-
The neural network model was trained and tested on a single continuum robot design. <a href="https://aimodels.fyi/papers/arxiv/online-learning-joint-muscle-mapping-using-vision">Extending the approach to a wider range of robot designs</a> and materials would be an important next step to demonstrate its generalizability.
-
The experiments were conducted in a controlled laboratory setting. <a href="https://aimodels.fyi/papers/arxiv/neural-network-based-approach-to-hybrid-systems">Evaluating the model's performance in real-world, dynamic environments</a> with external disturbances would be crucial for assessing its practical applicability.
-
The paper does not address the computational complexity and inference time of the neural network model, which could be important considerations for real-time control and planning applications.
Overall, this research represents a promising step towards more accurate and robust kinematic modeling of tendon-driven continuum robots. Further work to address the identified limitations and expand the scope of the approach would help solidify its contributions to the field.
Conclusion
This paper presents a novel neural network-based approach to modeling the hysteretic kinematics of tendon-actuated continuum robots. By capturing the complex, path-dependent relationships between actuator inputs and robot shape, the proposed model significantly outperforms traditional kinematic modeling techniques.
The successful experimental validation of this approach suggests that neural networks could be a powerful tool for improving the control and planning of continuum robots, unlocking new capabilities and applications in areas like search and rescue, surgical robotics, and human-robot interaction. As the field of continuum robotics continues to evolve, this research represents an important step towards more reliable and adaptable robotic systems inspired by nature.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Using Neural Networks to Model Hysteretic Kinematics in Tendon-Actuated Continuum Robots
Yuan Wang, Max McCandless, Abdulhamit Donder, Giovanni Pittiglio, Behnam Moradkhani, Yash Chitalia, Pierre E. Dupont
The ability to accurately model mechanical hysteretic behavior in tendon-actuated continuum robots using deep learning approaches is a growing area of interest. In this paper, we investigate the hysteretic response of two types of tendon-actuated continuum robots and, ultimately, compare three types of neural network modeling approaches with both forward and inverse kinematic mappings: feedforward neural network (FNN), FNN with a history input buffer, and long short-term memory (LSTM) network. We seek to determine which model best captures temporal dependent behavior. We find that, depending on the robot's design, choosing different kinematic inputs can alter whether hysteresis is exhibited by the system. Furthermore, we present the results of the model fittings, revealing that, in contrast to the standard FNN, both FNN with a history input buffer and the LSTM model exhibit the capacity to model historical dependence with comparable performance in capturing rate-dependent hysteresis.
Read more4/11/2024

0
Accounting for Hysteresis in the Forward Kinematics of Nonlinearly-Routed Tendon-Driven Continuum Robots via a Learned Deep Decoder Network
Brian Y. Cho, Daniel S. Esser, Jordan Thompson, Bao Thach, Robert J. Webster III, Alan Kuntz
Tendon-driven continuum robots have been gaining popularity in medical applications due to their ability to curve around complex anatomical structures, potentially reducing the invasiveness of surgery. However, accurate modeling is required to plan and control the movements of these flexible robots. Physics-based models have limitations due to unmodeled effects, leading to mismatches between model prediction and actual robot shape. Recently proposed learning-based methods have been shown to overcome some of these limitations but do not account for hysteresis, a significant source of error for these robots. To overcome these challenges, we propose a novel deep decoder neural network that predicts the complete shape of tendon-driven robots using point clouds as the shape representation, conditioned on prior configurations to account for hysteresis. We evaluate our method on a physical tendon-driven robot and show that our network model accurately predicts the robot's shape, significantly outperforming a state-of-the-art physics-based model and a learning-based model that does not account for hysteresis.
Read more4/8/2024
0
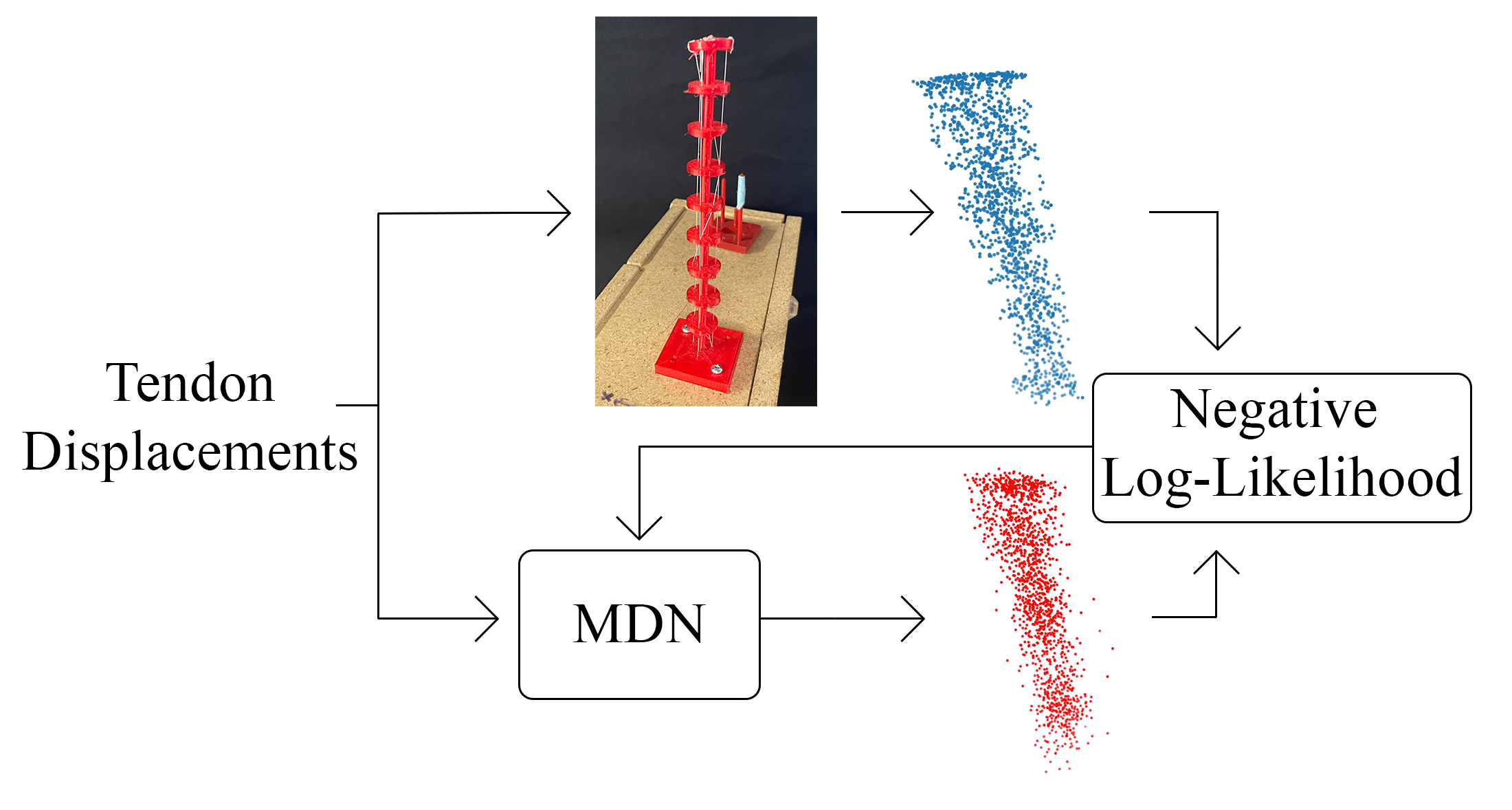
Modeling Kinematic Uncertainty of Tendon-Driven Continuum Robots via Mixture Density Networks
Jordan Thompson, Brian Y. Cho, Daniel S. Brown, Alan Kuntz
Tendon-driven continuum robot kinematic models are frequently computationally expensive, inaccurate due to unmodeled effects, or both. In particular, unmodeled effects produce uncertainties that arise during the robot's operation that lead to variability in the resulting geometry. We propose a novel solution to these issues through the development of a Gaussian mixture kinematic model. We train a mixture density network to output a Gaussian mixture model representation of the robot geometry given the current tendon displacements. This model computes a probability distribution that is more representative of the true distribution of geometries at a given configuration than a model that outputs a single geometry, while also reducing the computation time. We demonstrate one use of this model through a trajectory optimization method that explicitly reasons about the workspace uncertainty to minimize the probability of collision.
Read more4/8/2024
🌐
0
Hysteresis Compensation of Flexible Continuum Manipulator using RGBD Sensing and Temporal Convolutional Network
Junhyun Park, Seonghyeok Jang, Hyojae Park, Seongjun Bae, Minho Hwang
Flexible continuum manipulators are valued for minimally invasive surgery, offering access to confined spaces through nonlinear paths. However, cable-driven manipulators face control difficulties due to hysteresis from cabling effects such as friction, elongation, and coupling. These effects are difficult to model due to nonlinearity and the difficulties become even more evident when dealing with long and coupled, multi-segmented manipulator. This paper proposes a data-driven approach based on Deep Neural Networks (DNN) to capture these nonlinear and previous states-dependent characteristics of cable actuation. We collect physical joint configurations according to command joint configurations using RGBD sensing and 7 fiducial markers to model the hysteresis of the proposed manipulator. Result on a study comparing the estimation performance of four DNN models show that the Temporal Convolution Network (TCN) demonstrates the highest predictive capability. Leveraging trained TCNs, we build a control algorithm to compensate for hysteresis. Tracking tests in task space using unseen trajectories show that the proposed control algorithm reduces the average position and orientation error by 61.39% (from 13.7mm to 5.29 mm) and 64.04% (from 31.17{deg} to 11.21{deg}), respectively. This result implies that the proposed calibrated controller effectively reaches the desired configurations by estimating the hysteresis of the manipulator. Applying this method in real surgical scenarios has the potential to enhance control precision and improve surgical performance.
Read more5/6/2024