Module-wise Adaptive Adversarial Training for End-to-end Autonomous Driving

0

Sign in to get full access
Overview
- This paper proposes a module-wise adaptive adversarial training approach for end-to-end autonomous driving systems.
- The key idea is to train the system to be robust against module-specific adversarial attacks by adapting the training process for each module.
- The approach aims to improve the overall system's performance and safety under adversarial conditions.
Plain English Explanation
The paper is about making self-driving car systems more secure and reliable. Self-driving cars use complex software and AI models to process sensor data, understand the environment, and make driving decisions. However, these systems can be vulnerable to adversarial attacks, where small changes to the input data can cause the system to make mistakes.
The researchers developed a new training technique called "module-wise adaptive adversarial training" to address this issue. The key idea is to train each individual module (e.g., perception, planning, control) of the self-driving system to be robust against attacks that target that specific module. By tailoring the training for each module, the overall system becomes more resistant to a wider range of adversarial threats.
This approach aims to improve the safety and reliability of self-driving cars, even when they encounter unexpected situations or malicious attempts to fool the system. By making the individual components more resilient, the entire self-driving system becomes more robust and can better navigate real-world challenges.
Technical Explanation
The paper proposes a module-wise adaptive adversarial training approach for end-to-end autonomous driving systems. The key idea is to train each module (e.g., perception, planning, control) of the self-driving system to be robust against adversarial attacks that target that specific module.
The training process involves the following steps:
- Modularization: The end-to-end autonomous driving system is decomposed into individual modules, such as perception, planning, and control.
- Module-wise Adversarial Training: For each module, the researchers generate adversarial examples that specifically target that module's performance. The module is then trained to be robust against these targeted attacks.
- Adaptive Adversarial Training: The adversarial training process adapts over time, with the difficulty of the generated adversarial examples increasing as the module becomes more robust.
By training each module to be resilient against attacks tailored to that module, the overall system becomes more robust to a wider range of adversarial threats. The researchers demonstrate the effectiveness of their approach through experiments on a simulated autonomous driving environment.
Critical Analysis
The paper presents a promising approach to improve the robustness of end-to-end autonomous driving systems against adversarial attacks. The module-wise adaptive adversarial training method addresses a critical challenge in maintaining the safety and reliability of self-driving cars in the face of malicious attempts to compromise the system.
One potential limitation of the approach is the reliance on a modular system architecture. In practice, end-to-end autonomous driving systems may have complex interdependencies between modules, which could complicate the module-wise training process and reduce the overall effectiveness of the approach.
Additionally, the paper's experiments were conducted in a simulated environment, which may not fully capture the complexity and unpredictability of real-world driving conditions. Further research and validation in real-world scenarios would be necessary to assess the practical applicability and effectiveness of the proposed method.
Conclusion
The paper presents a novel module-wise adaptive adversarial training approach to improve the robustness of end-to-end autonomous driving systems. By tailoring the training process to each individual module, the researchers aim to create a more secure and reliable self-driving system that can better navigate adversarial threats.
This research contributes to the ongoing efforts to enhance the safety and trustworthiness of autonomous vehicles, which is crucial for their widespread adoption and societal acceptance. The module-wise adaptive adversarial training technique offers a promising direction for further development and real-world validation in the field of autonomous driving.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Module-wise Adaptive Adversarial Training for End-to-end Autonomous Driving
Tianyuan Zhang, Lu Wang, Jiaqi Kang, Xinwei Zhang, Siyuan Liang, Yuwei Chen, Aishan Liu, Xianglong Liu
Recent advances in deep learning have markedly improved autonomous driving (AD) models, particularly end-to-end systems that integrate perception, prediction, and planning stages, achieving state-of-the-art performance. However, these models remain vulnerable to adversarial attacks, where human-imperceptible perturbations can disrupt decision-making processes. While adversarial training is an effective method for enhancing model robustness against such attacks, no prior studies have focused on its application to end-to-end AD models. In this paper, we take the first step in adversarial training for end-to-end AD models and present a novel Module-wise Adaptive Adversarial Training (MA2T). However, extending conventional adversarial training to this context is highly non-trivial, as different stages within the model have distinct objectives and are strongly interconnected. To address these challenges, MA2T first introduces Module-wise Noise Injection, which injects noise before the input of different modules, targeting training models with the guidance of overall objectives rather than each independent module loss. Additionally, we introduce Dynamic Weight Accumulation Adaptation, which incorporates accumulated weight changes to adaptively learn and adjust the loss weights of each module based on their contributions (accumulated reduction rates) for better balance and robust training. To demonstrate the efficacy of our defense, we conduct extensive experiments on the widely-used nuScenes dataset across several end-to-end AD models under both white-box and black-box attacks, where our method outperforms other baselines by large margins (+5-10%). Moreover, we validate the robustness of our defense through closed-loop evaluation in the CARLA simulation environment, showing improved resilience even against natural corruption.
Read more9/12/2024

0
Attack End-to-End Autonomous Driving through Module-Wise Noise
Lu Wang, Tianyuan Zhang, Yikai Han, Muyang Fang, Ting Jin, Jiaqi Kang
With recent breakthroughs in deep neural networks, numerous tasks within autonomous driving have exhibited remarkable performance. However, deep learning models are susceptible to adversarial attacks, presenting significant security risks to autonomous driving systems. Presently, end-to-end architectures have emerged as the predominant solution for autonomous driving, owing to their collaborative nature across different tasks. Yet, the implications of adversarial attacks on such models remain relatively unexplored. In this paper, we conduct comprehensive adversarial security research on the modular end-to-end autonomous driving model for the first time. We thoroughly consider the potential vulnerabilities in the model inference process and design a universal attack scheme through module-wise noise injection. We conduct large-scale experiments on the full-stack autonomous driving model and demonstrate that our attack method outperforms previous attack methods. We trust that our research will offer fresh insights into ensuring the safety and reliability of autonomous driving systems.
Read more9/14/2024
0
Dynamic Adversarial Attacks on Autonomous Driving Systems
Amirhosein Chahe, Chenan Wang, Abhishek Jeyapratap, Kaidi Xu, Lifeng Zhou
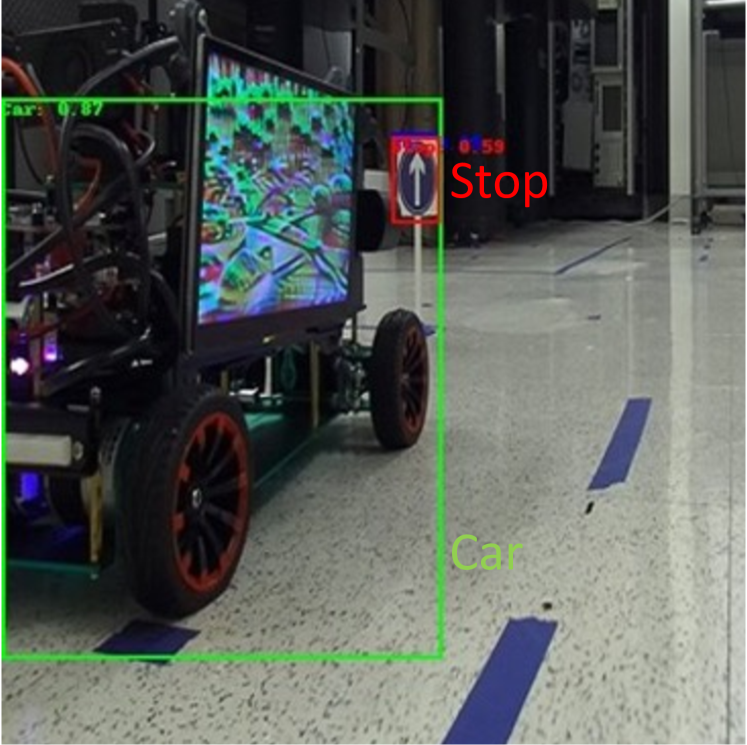
This paper introduces an attacking mechanism to challenge the resilience of autonomous driving systems. Specifically, we manipulate the decision-making processes of an autonomous vehicle by dynamically displaying adversarial patches on a screen mounted on another moving vehicle. These patches are optimized to deceive the object detection models into misclassifying targeted objects, e.g., traffic signs. Such manipulation has significant implications for critical multi-vehicle interactions such as intersection crossing and lane changing, which are vital for safe and efficient autonomous driving systems. Particularly, we make four major contributions. First, we introduce a novel adversarial attack approach where the patch is not co-located with its target, enabling more versatile and stealthy attacks. Moreover, our method utilizes dynamic patches displayed on a screen, allowing for adaptive changes and movement, enhancing the flexibility and performance of the attack. To do so, we design a Screen Image Transformation Network (SIT-Net), which simulates environmental effects on the displayed images, narrowing the gap between simulated and real-world scenarios. Further, we integrate a positional loss term into the adversarial training process to increase the success rate of the dynamic attack. Finally, we shift the focus from merely attacking perceptual systems to influencing the decision-making algorithms of self-driving systems. Our experiments demonstrate the first successful implementation of such dynamic adversarial attacks in real-world autonomous driving scenarios, paving the way for advancements in the field of robust and secure autonomous driving.
Read more5/16/2024

0
VCAT: Vulnerability-aware and Curiosity-driven Adversarial Training for Enhancing Autonomous Vehicle Robustness
Xuan Cai, Zhiyong Cui, Xuesong Bai, Ruimin Ke, Zhenshu Ma, Haiyang Yu, Yilong Ren
Autonomous vehicles (AVs) face significant threats to their safe operation in complex traffic environments. Adversarial training has emerged as an effective method of enabling AVs to preemptively fortify their robustness against malicious attacks. Train an attacker using an adversarial policy, allowing the AV to learn robust driving through interaction with this attacker. However, adversarial policies in existing methodologies often get stuck in a loop of overexploiting established vulnerabilities, resulting in poor improvement for AVs. To overcome the limitations, we introduce a pioneering framework termed Vulnerability-aware and Curiosity-driven Adversarial Training (VCAT). Specifically, during the traffic vehicle attacker training phase, a surrogate network is employed to fit the value function of the AV victim, providing dense information about the victim's inherent vulnerabilities. Subsequently, random network distillation is used to characterize the novelty of the environment, constructing an intrinsic reward to guide the attacker in exploring unexplored territories. In the victim defense training phase, the AV is trained in critical scenarios in which the pretrained attacker is positioned around the victim to generate attack behaviors. Experimental results revealed that the training methodology provided by VCAT significantly improved the robust control capabilities of learning-based AVs, outperforming both conventional training modalities and alternative reinforcement learning counterparts, with a marked reduction in crash rates. The code is available at https://github.com/caixxuan/VCAT.
Read more9/23/2024