Momentum-Aware Trajectory Optimisation using Full-Centroidal Dynamics and Implicit Inverse Kinematics

0
Sign in to get full access
Overview
- This paper proposes a trajectory optimization framework for agile robotic maneuvers
- It uses full-centroidal dynamics and implicit inverse kinematics to generate momentum-aware trajectories
- The framework enables highly dynamic and aggressive robotic motions while respecting physical constraints
Plain English Explanation
The paper presents a new approach for generating trajectories that enable robots to perform agile and dynamic maneuvers. The key idea is to incorporate the robot's full-body momentum into the trajectory optimization process, rather than just considering the motion of the robot's center of mass.
By considering the robot's full-centroidal dynamics [link to "full-centroidal dynamics" keyword] and using an implicit inverse kinematics solver [link to "implicit inverse kinematics" keyword], the framework can produce trajectories that are both physically feasible and highly maneuverable. This allows the robot to execute aggressive motions, such as rapid changes in direction or high-speed movements, while still respecting the physical limitations of the robot's joints and actuators.
The key advantage of this approach is that it enables robots to perform a wider range of agile and dynamic maneuvers [link to "agile maneuvers" keyword], which could be useful in a variety of applications, such as search and rescue, athletic robots, or other scenarios where rapid and nimble movement is required.
Technical Explanation
The paper introduces a trajectory optimization framework that leverages the robot's full-body momentum to generate highly dynamic and aggressive motions. The framework uses a full-centroidal dynamics model [link to "full-centroidal dynamics" keyword] to capture the robot's rotational and linear momentum, rather than just considering the motion of the center of mass.
The optimization problem is formulated to minimize a cost function that accounts for both the robot's movement and the desired momentum profile. This allows the framework to generate trajectories that not only achieve the desired task, but also maintain the robot's balance and stability through the use of momentum-based control.
To solve the inverse kinematics problem [link to "implicit inverse kinematics" keyword] and ensure the feasibility of the generated trajectories, the framework employs an implicit inverse kinematics solver. This approach avoids the need for explicit joint angle calculations, which can be computationally expensive and prone to numerical instabilities, especially for complex robotic systems.
The paper presents several case studies demonstrating the framework's ability to generate highly dynamic and aggressive maneuvers, such as rapid changes in direction and high-speed movements. The results show that the proposed approach outperforms traditional trajectory optimization methods in terms of agility and momentum awareness.
Critical Analysis
The paper presents a compelling approach to trajectory optimization that leverages the robot's full-body momentum to enable highly agile and dynamic motions. The use of full-centroidal dynamics and implicit inverse kinematics [link to both keywords] is a novel and promising direction for robotic motion planning and control.
One potential limitation of the framework is that it may be computationally expensive, especially for complex robotic systems with many degrees of freedom. The implicit inverse kinematics solver, while avoiding some of the pitfalls of explicit joint angle calculations, may still have significant computational requirements, particularly in real-time applications.
Additionally, the paper does not discuss the robustness of the framework to external disturbances or modeling uncertainties. In real-world scenarios, robots often have to contend with unpredictable environmental factors, and it would be valuable to understand how the proposed approach would perform in the face of such challenges.
Further research could explore ways to improve the computational efficiency of the framework, as well as investigate its performance under more realistic conditions, such as in the presence of external forces or imperfect sensor data. Incorporating feedback control mechanisms or adaptive strategies could also enhance the framework's robustness and adaptability.
Conclusion
This paper presents a novel trajectory optimization framework that leverages the robot's full-body momentum to enable highly agile and dynamic motions. By using full-centroidal dynamics and implicit inverse kinematics, the framework can generate physically feasible trajectories that allow robots to perform a wide range of aggressive maneuvers.
The key innovation of this approach is its ability to explicitly consider the robot's rotational and linear momentum, rather than just the motion of the center of mass. This enables the framework to produce trajectories that are both dynamically feasible and optimized for agility, which could have significant implications for a variety of robotic applications, such as search and rescue, athletic robots, and other scenarios where rapid and nimble movement is required.
While the framework may have some computational challenges, the insights and techniques presented in this paper represent an important step forward in the field of robotic trajectory optimization and control. Further research to enhance the efficiency and robustness of the approach could unlock even more opportunities for highly dynamic and agile robotic behaviors.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Momentum-Aware Trajectory Optimisation using Full-Centroidal Dynamics and Implicit Inverse Kinematics
Aristotelis Papatheodorou, Wolfgang Merkt, Alexander L. Mitchell, Ioannis Havoutis
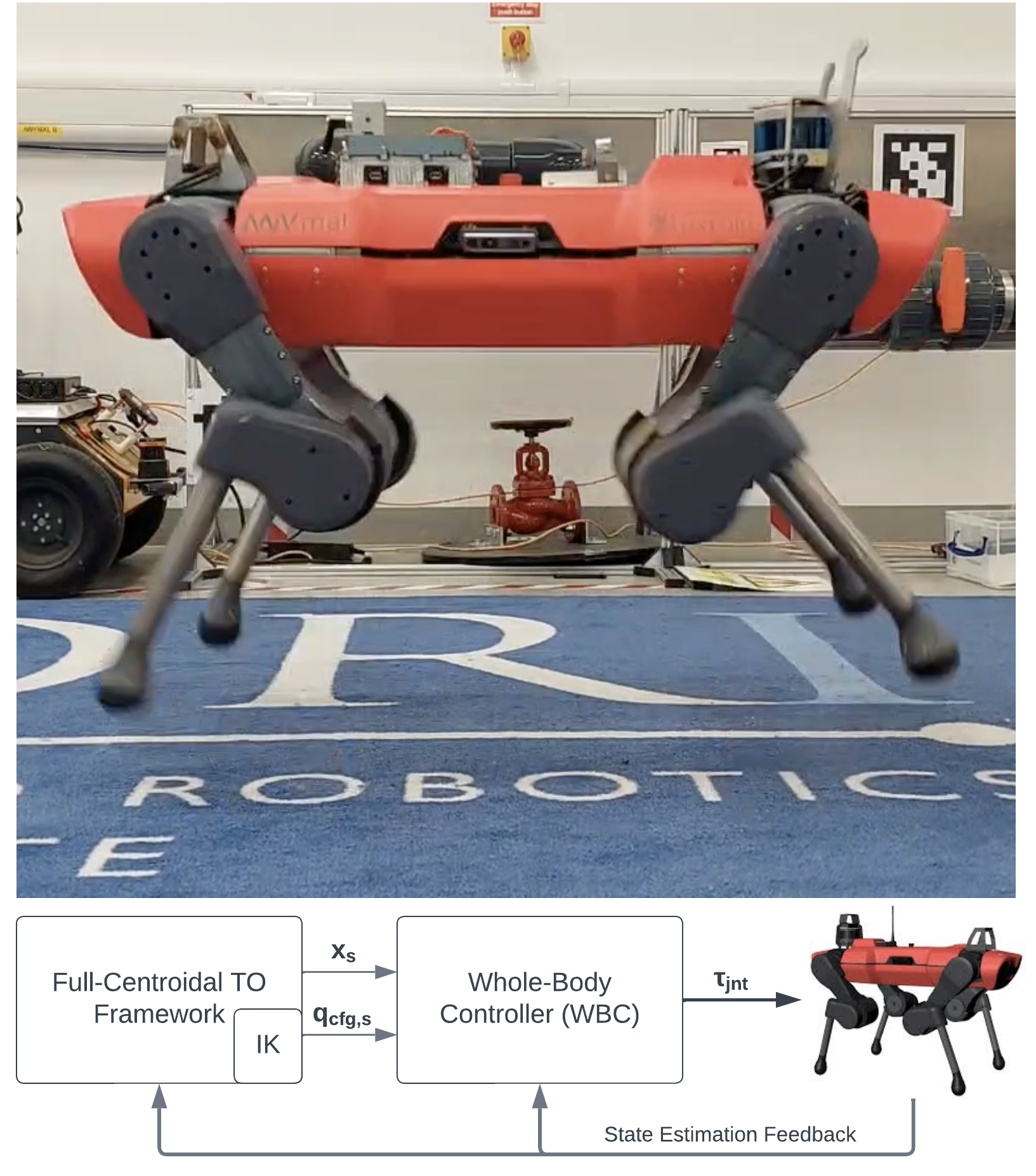
The current state-of-the-art gradient-based optimisation frameworks are able to produce impressive dynamic manoeuvres such as linear and rotational jumps. However, these methods, which optimise over the full rigid-body dynamics of the robot, often require precise foothold locations apriori, while real-time performance is not guaranteed without elaborate regularisation and tuning of the cost function. In contrast, we investigate the advantages of a task-space optimisation framework, with special focus on acrobatic motions. Our proposed formulation exploits the system's high-order nonlinearities, such as the nonholonomy of the angular momentum, in order to produce feasible, high-acceleration manoeuvres. By leveraging the full-centroidal dynamics of the quadruped ANYmal C and directly optimising its footholds and contact forces, the framework is capable of producing efficient motion plans with low computational overhead. Finally, we deploy our proposed framework on the ANYmal C platform, and demonstrate its true capabilities through real-world experiments, with the successful execution of high-acceleration motions, such as linear and rotational jumps. Extensive analysis of these shows that the robot's dynamics can be exploited to surpass its hardware limitations of having a high mass and low-torque limits.
Read more9/14/2024

0
CDM-MPC: An Integrated Dynamic Planning and Control Framework for Bipedal Robots Jumping
Zhicheng He, Jiayang Wu, Jingwen Zhang, Shibowen Zhang, Yapeng Shi, Hangxin Liu, Lining Sun, Yao Su, Xiaokun Leng
Performing acrobatic maneuvers like dynamic jumping in bipedal robots presents significant challenges in terms of actuation, motion planning, and control. Traditional approaches to these tasks often simplify dynamics to enhance computational efficiency, potentially overlooking critical factors such as the control of centroidal angular momentum (CAM) and the variability of centroidal composite rigid body inertia (CCRBI). This paper introduces a novel integrated dynamic planning and control framework, termed centroidal dynamics model-based model predictive control (CDM-MPC), designed for robust jumping control that fully considers centroidal momentum and non-constant CCRBI. The framework comprises an optimization-based kinodynamic motion planner and an MPC controller for real-time trajectory tracking and replanning. Additionally, a centroidal momentum-based inverse kinematics (IK) solver and a landing heuristic controller are developed to ensure stability during high-impact landings. The efficacy of the CDM-MPC framework is validated through extensive testing on the full-sized humanoid robot KUAVO in both simulations and experiments.
Read more5/21/2024

0
New!Real-time Coupled Centroidal Motion and Footstep Planning for Biped Robots
Tara Bartlett, Ian R. Manchester
This paper presents an algorithm that finds a centroidal motion and footstep plan for a Spring-Loaded Inverted Pendulum (SLIP)-like bipedal robot model substantially faster than real-time. This is achieved with a novel representation of the dynamic footstep planning problem, where each point in the environment is considered a potential foothold that can apply a force to the center of mass to keep it on a desired trajectory. For a biped, up to two such footholds per time step must be selected, and we approximate this cardinality constraint with an iteratively reweighted $l_1$-norm minimization. Along with a linearizing approximation of an angular momentum constraint, this results in a quadratic program can be solved for a contact schedule and center of mass trajectory with automatic gait discovery. A 2 s planning horizon with 13 time steps and 20 surfaces available at each time is solved in 142 ms, roughly ten times faster than comparable existing methods in the literature. We demonstrate the versatility of this program in a variety of simulated environments.
Read more9/17/2024

0
A Fast Online Omnidirectional Quadrupedal Jumping Framework Via Virtual-Model Control and Minimum Jerk Trajectory Generation
Linzhu Yue, Lingwei Zhang, Zhitao Song, Hongbo Zhang, Jinhu Dong, Xuanqi Zeng, Yun-Hui Liu
Exploring the limits of quadruped robot agility, particularly in the context of rapid and real-time planning and execution of omnidirectional jump trajectories, presents significant challenges due to the complex dynamics involved, especially when considering significant impulse contacts. This paper introduces a new framework to enable fast, omnidirectional jumping capabilities for quadruped robots. Utilizing minimum jerk technology, the proposed framework efficiently generates jump trajectories that exploit its analytical solutions, ensuring numerical stability and dynamic compatibility with minimal computational resources. The virtual model control is employed to formulate a Quadratic Programming (QP) optimization problem to accurately track the Center of Mass (CoM) trajectories during the jump phase. The whole-body control strategies facilitate precise and compliant landing motion. Moreover, the different jumping phase is triggered by time-schedule. The framework's efficacy is demonstrated through its implementation on an enhanced version of the open-source Mini Cheetah robot. Omnidirectional jumps-including forward, backward, and other directional-were successfully executed, showcasing the robot's capability to perform rapid and consecutive jumps with an average trajectory generation and tracking solution time of merely 50 microseconds.
Read more7/2/2024