Real-time Coupled Centroidal Motion and Footstep Planning for Biped Robots

0

Sign in to get full access
Overview
- This paper presents a real-time system for coupled centroidal motion and footstep planning for biped robots.
- The system aims to generate dynamic and energy-efficient walking motions while considering balance and stability constraints.
- It combines centroidal motion optimization with footstep planning to enable agile and robust bipedal locomotion.
Plain English Explanation
The paper describes a system that allows biped robots to plan their steps and overall body movements in real-time. The key idea is to [object Object] the planning of the robot's [object Object] motion and the placement of its feet. This allows the robot to generate dynamic and energy-efficient walking motions while maintaining balance and stability.
The system takes into account factors like the robot's [object Object] and the [object Object] on where the robot can place its feet. By carefully coordinating these aspects, the robot can navigate complex environments and perform [object Object] and robust locomotion tasks.
Technical Explanation
The paper presents a real-time system for coupled centroidal motion and footstep planning for biped robots. The system combines a centroidal motion optimizer with a footstep planner to generate dynamic and energy-efficient walking motions while considering balance and stability constraints.
The centroidal motion optimizer plans the robot's [object Object] trajectory and [object Object] based on the current state and desired goal. The footstep planner then determines the appropriate foot placements to execute the planned centroidal motion while satisfying [object Object].
The key innovation is the [object Object] between the centroidal motion optimizer and the footstep planner, which enables the system to generate [object Object] bipedal locomotion in real-time.
Critical Analysis
The paper presents a promising approach for real-time coupled centroidal motion and footstep planning for biped robots. The tight integration of these two components is a key strength, as it allows the system to generate dynamic and energy-efficient walking motions while maintaining balance and stability.
However, the paper does not address the [object Object] of the proposed approach, which may limit its applicability to real-world scenarios with tight time constraints. Additionally, the paper does not provide a [object Object] of the system's performance in diverse environments or its [object Object].
Conclusion
This paper presents a real-time system for coupled centroidal motion and footstep planning that enables biped robots to navigate complex environments with [object Object] locomotion. The tight integration of the centroidal motion optimizer and the footstep planner is a key innovation that allows the system to generate dynamic and energy-efficient walking motions while considering balance and stability constraints.
While the paper demonstrates the potential of this approach, further research is needed to address the computational complexity and provide a more comprehensive evaluation of the system's performance and robustness. Nonetheless, this work represents an important step towards enabling more advanced and capable bipedal robots.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Real-time Coupled Centroidal Motion and Footstep Planning for Biped Robots
Tara Bartlett, Ian R. Manchester
This paper presents an algorithm that finds a centroidal motion and footstep plan for a Spring-Loaded Inverted Pendulum (SLIP)-like bipedal robot model substantially faster than real-time. This is achieved with a novel representation of the dynamic footstep planning problem, where each point in the environment is considered a potential foothold that can apply a force to the center of mass to keep it on a desired trajectory. For a biped, up to two such footholds per time step must be selected, and we approximate this cardinality constraint with an iteratively reweighted $l_1$-norm minimization. Along with a linearizing approximation of an angular momentum constraint, this results in a quadratic program can be solved for a contact schedule and center of mass trajectory with automatic gait discovery. A 2 s planning horizon with 13 time steps and 20 surfaces available at each time is solved in 142 ms, roughly ten times faster than comparable existing methods in the literature. We demonstrate the versatility of this program in a variety of simulated environments.
Read more9/17/2024
0
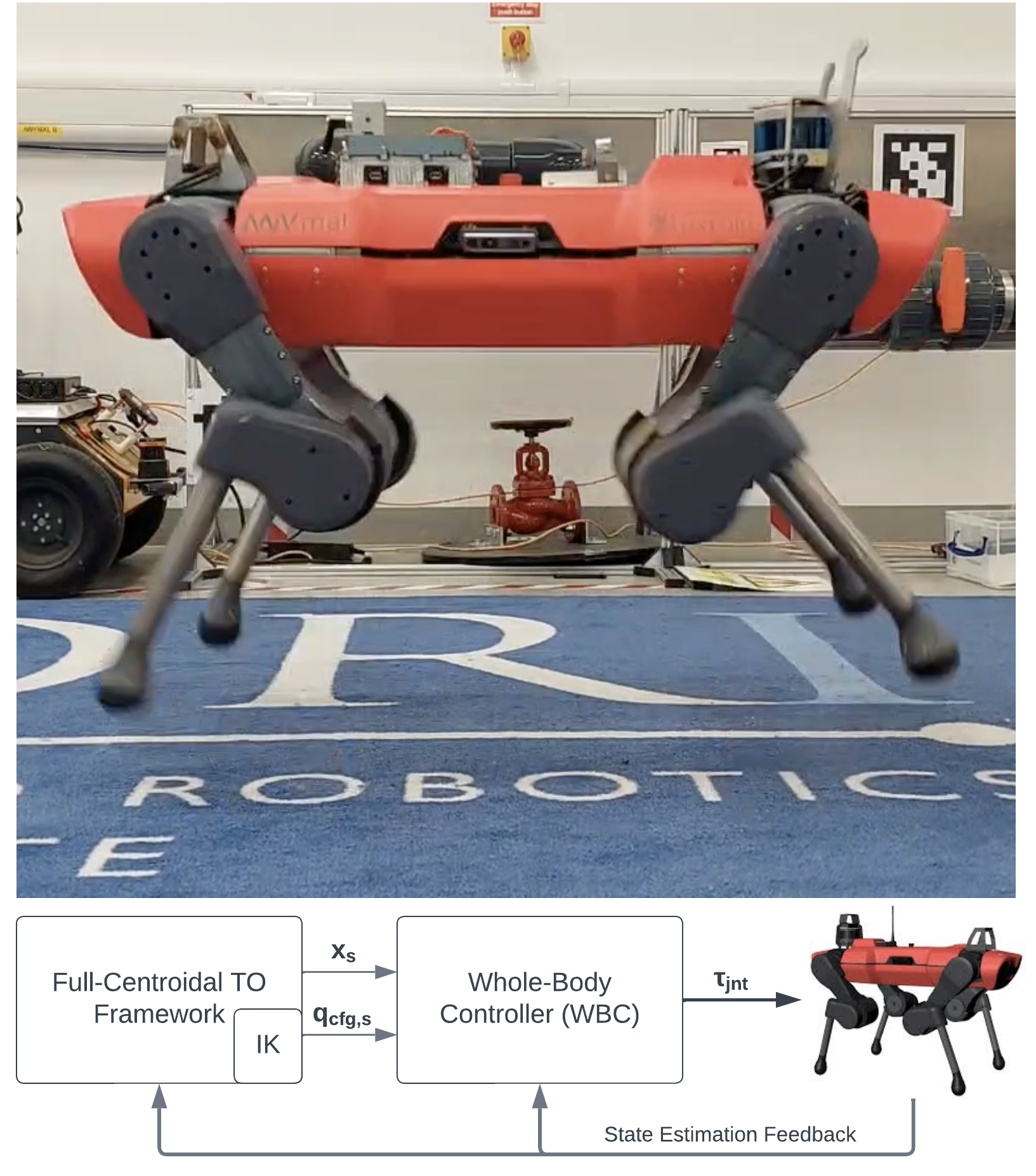
Momentum-Aware Trajectory Optimisation using Full-Centroidal Dynamics and Implicit Inverse Kinematics
Aristotelis Papatheodorou, Wolfgang Merkt, Alexander L. Mitchell, Ioannis Havoutis
The current state-of-the-art gradient-based optimisation frameworks are able to produce impressive dynamic manoeuvres such as linear and rotational jumps. However, these methods, which optimise over the full rigid-body dynamics of the robot, often require precise foothold locations apriori, while real-time performance is not guaranteed without elaborate regularisation and tuning of the cost function. In contrast, we investigate the advantages of a task-space optimisation framework, with special focus on acrobatic motions. Our proposed formulation exploits the system's high-order nonlinearities, such as the nonholonomy of the angular momentum, in order to produce feasible, high-acceleration manoeuvres. By leveraging the full-centroidal dynamics of the quadruped ANYmal C and directly optimising its footholds and contact forces, the framework is capable of producing efficient motion plans with low computational overhead. Finally, we deploy our proposed framework on the ANYmal C platform, and demonstrate its true capabilities through real-world experiments, with the successful execution of high-acceleration motions, such as linear and rotational jumps. Extensive analysis of these shows that the robot's dynamics can be exploited to surpass its hardware limitations of having a high mass and low-torque limits.
Read more9/14/2024

0
Online Non-linear Centroidal MPC with Stability Guarantees for Robust Locomotion of Legged Robots
Mohamed Elobaid, Giulio Turrisi, Lorenzo Rapetti, Giulio Romualdi, Stefano Dafarra, Tomohiro Kawakami, Tomohiro Chaki, Takahide Yoshiike, Claudio Semini, Daniele Pucci
Nonlinear model predictive locomotion controllers based on the reduced centroidal dynamics are nowadays ubiquitous in legged robots. These schemes, even if they assume an inherent simplification of the robot's dynamics, were shown to endow robots with a step-adjustment capability in reaction to small pushes, and, moreover, in the case of uncertain parameters - as unknown payloads - they were shown to be able to provide some practical, albeit limited, robustness. In this work, we provide rigorous certificates of their closed loop stability via a reformulation of the centroidal MPC controller. This is achieved thanks to a systematic procedure inspired by the machinery of adaptive control, together with ideas coming from Control Lyapunov functions. Our reformulation, in addition, provides robustness for a class of unmeasured constant disturbances. To demonstrate the generality of our approach, we validated our formulation on a new generation of humanoid robots - the 56.7 kg ergoCub, as well as on a commercially available 21 kg quadruped robot, Aliengo.
Read more9/4/2024

0
Demonstrating a Robust Walking Algorithm for Underactuated Bipedal Robots in Non-flat, Non-stationary Environments
Oluwami Dosunmu-Ogunbi, Aayushi Shrivastava, Jessy W Grizzle
This work explores an innovative algorithm designed to enhance the mobility of underactuated bipedal robots across challenging terrains, especially when navigating through spaces with constrained opportunities for foot support, like steps or stairs. By combining ankle torque with a refined angular momentum-based linear inverted pendulum model (ALIP), our method allows variability in the robot's center of mass height. We employ a dual-strategy controller that merges virtual constraints for precise motion regulation across essential degrees of freedom with an ALIP-centric model predictive control (MPC) framework, aimed at enforcing gait stability. The effectiveness of our feedback design is demonstrated through its application on the Cassie bipedal robot, which features 20 degrees of freedom. Key to our implementation is the development of tailored nominal trajectories and an optimized MPC that reduces the execution time to under 500 microseconds--and, hence, is compatible with Cassie's controller update frequency. This paper not only showcases the successful hardware deployment but also demonstrates a new capability, a bipedal robot using a moving walkway.
Read more9/9/2024