Monocular Gaussian SLAM with Language Extended Loop Closure

0
💬
Sign in to get full access
Overview
- This paper presents MG-SLAM, a monocular Gaussian SLAM (Simultaneous Localization And Mapping) system that can perform drift-corrected tracking and high-fidelity reconstruction while achieving a high-level understanding of the environment.
- The key ideas are to represent the global map as 3D Gaussian and use it to guide the estimation of the scene geometry, and to use a language-extended loop closure module based on CLIP feature to continuously perform global optimization and correct drift errors.
- The system shows promising results on multiple challenging datasets, outperforming some existing RGB-D SLAM methods.
Plain English Explanation
The paper describes a new SLAM system called MG-SLAM that uses a single camera (monocular) rather than a depth sensor like RGB-D cameras. SLAM systems are used to simultaneously map an environment and track the location of the camera within that environment.
Existing monocular SLAM methods have had limited success, often failing to correct for the gradual accumulation of errors (drift) over time due to the lack of loop closure and global optimization. MG-SLAM addresses these limitations by representing the global map as a 3D Gaussian distribution, which helps estimate the scene geometry even without depth information.
Additionally, MG-SLAM includes a "language-extended loop closure module" that uses a machine learning model called CLIP to continuously optimize the global map and correct drift errors. This allows the system to maintain accurate tracking and high-quality 3D reconstructions of the environment over long periods of time.
The paper shows that MG-SLAM outperforms some existing RGB-D SLAM methods, demonstrating the potential of monocular Gaussian SLAM techniques. This could lead to more affordable and widely deployable SLAM systems that don't require specialized depth sensors.
Technical Explanation
The core of the MG-SLAM system is the representation of the global map as a 3D Gaussian distribution. This allows the system to leverage the inherent spatial relationships in the map to guide the estimation of scene geometry, even in the absence of direct depth measurements from an RGB-D sensor.
The system uses a sparse feature-based tracking approach to estimate the camera pose, supplemented by the global Gaussian map to provide additional constraints on the scene structure. This helps mitigate the effects of drift that can accumulate over time in monocular SLAM systems.
To further improve the long-term consistency of the map, MG-SLAM incorporates a language-extended loop closure module. This module uses the CLIP deep learning model to extract visual and semantic features from the camera images. These features are then used to identify loop closures - situations where the camera revisits a previously mapped area - and perform global optimization to correct any accumulated drift.
The authors evaluate MG-SLAM on several challenging datasets and show that it can outperform existing RGB-D SLAM methods in terms of both tracking accuracy and the fidelity of the reconstructed 3D maps. This demonstrates the potential of the Gaussian SLAM and language-based loop closure approaches to enable high-performance monocular SLAM systems.
Critical Analysis
The paper presents a compelling approach to address the limitations of existing monocular SLAM systems. The use of a 3D Gaussian map representation and the language-extended loop closure module are innovative ideas that show promise in improving the long-term consistency and accuracy of monocular SLAM.
However, the paper does not provide a detailed analysis of the computational and memory requirements of the MG-SLAM system. As the global map is represented as a 3D Gaussian distribution, the scalability of the approach to large-scale environments may be a concern that should be explored further.
Additionally, the authors do not discuss the potential impact of inaccuracies or biases in the CLIP model on the performance of the loop closure module. While the results are promising, a more thorough investigation of the robustness of the system to such issues would be valuable.
Finally, the paper focuses on the technical aspects of the MG-SLAM system and does not delve into potential real-world applications or the societal implications of this research. Exploring these broader perspectives could help contextualize the significance of the work and inspire further research directions.
Conclusion
The MG-SLAM system presented in this paper represents a significant advancement in monocular SLAM technology. By combining a Gaussian representation of the global map with a language-extended loop closure module, the authors have developed a SLAM system that can maintain accurate tracking and high-fidelity 3D reconstructions over long periods of time, even in the absence of direct depth measurements.
The promising results demonstrated in the paper suggest that this approach could lead to more affordable and widely deployable SLAM systems, with applications in areas such as robotics, augmented reality, and autonomous navigation. As the field of SLAM continues to evolve, further research exploring the scalability, robustness, and broader implications of techniques like MG-SLAM will be crucial in realizing the full potential of this technology.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
💬
0
Monocular Gaussian SLAM with Language Extended Loop Closure
Tian Lan, Qinwei Lin, Haoqian Wang
Recently,3DGaussianSplattinghasshowngreatpotentialin visual Simultaneous Localization And Mapping (SLAM). Existing methods have achieved encouraging results on RGB-D SLAM, but studies of the monocular case are still scarce. Moreover, they also fail to correct drift errors due to the lack of loop closure and global optimization. In this paper, we present MG-SLAM, a monocular Gaussian SLAM with a language-extended loop closure module capable of performing drift-corrected tracking and high-fidelity reconstruction while achieving a high-level understanding of the environment. Our key idea is to represent the global map as 3D Gaussian and use it to guide the estimation of the scene geometry, thus mitigating the efforts of missing depth information. Further, an additional language-extended loop closure module which is based on CLIP feature is designed to continually perform global optimization to correct drift errors accumulated as the system runs. Our system shows promising results on multiple challenging datasets in both tracking and mapping and even surpasses some existing RGB-D methods.
Read more5/24/2024

0
New!GLC-SLAM: Gaussian Splatting SLAM with Efficient Loop Closure
Ziheng Xu, Qingfeng Li, Chen Chen, Xuefeng Liu, Jianwei Niu
3D Gaussian Splatting (3DGS) has gained significant attention for its application in dense Simultaneous Localization and Mapping (SLAM), enabling real-time rendering and high-fidelity mapping. However, existing 3DGS-based SLAM methods often suffer from accumulated tracking errors and map drift, particularly in large-scale environments. To address these issues, we introduce GLC-SLAM, a Gaussian Splatting SLAM system that integrates global optimization of camera poses and scene models. Our approach employs frame-to-model tracking and triggers hierarchical loop closure using a global-to-local strategy to minimize drift accumulation. By dividing the scene into 3D Gaussian submaps, we facilitate efficient map updates following loop corrections in large scenes. Additionally, our uncertainty-minimized keyframe selection strategy prioritizes keyframes observing more valuable 3D Gaussians to enhance submap optimization. Experimental results on various datasets demonstrate that GLC-SLAM achieves superior or competitive tracking and mapping performance compared to state-of-the-art dense RGB-D SLAM systems.
Read more9/18/2024
0
MGS-SLAM: Monocular Sparse Tracking and Gaussian Mapping with Depth Smooth Regularization
Pengcheng Zhu, Yaoming Zhuang, Baoquan Chen, Li Li, Chengdong Wu, Zhanlin Liu
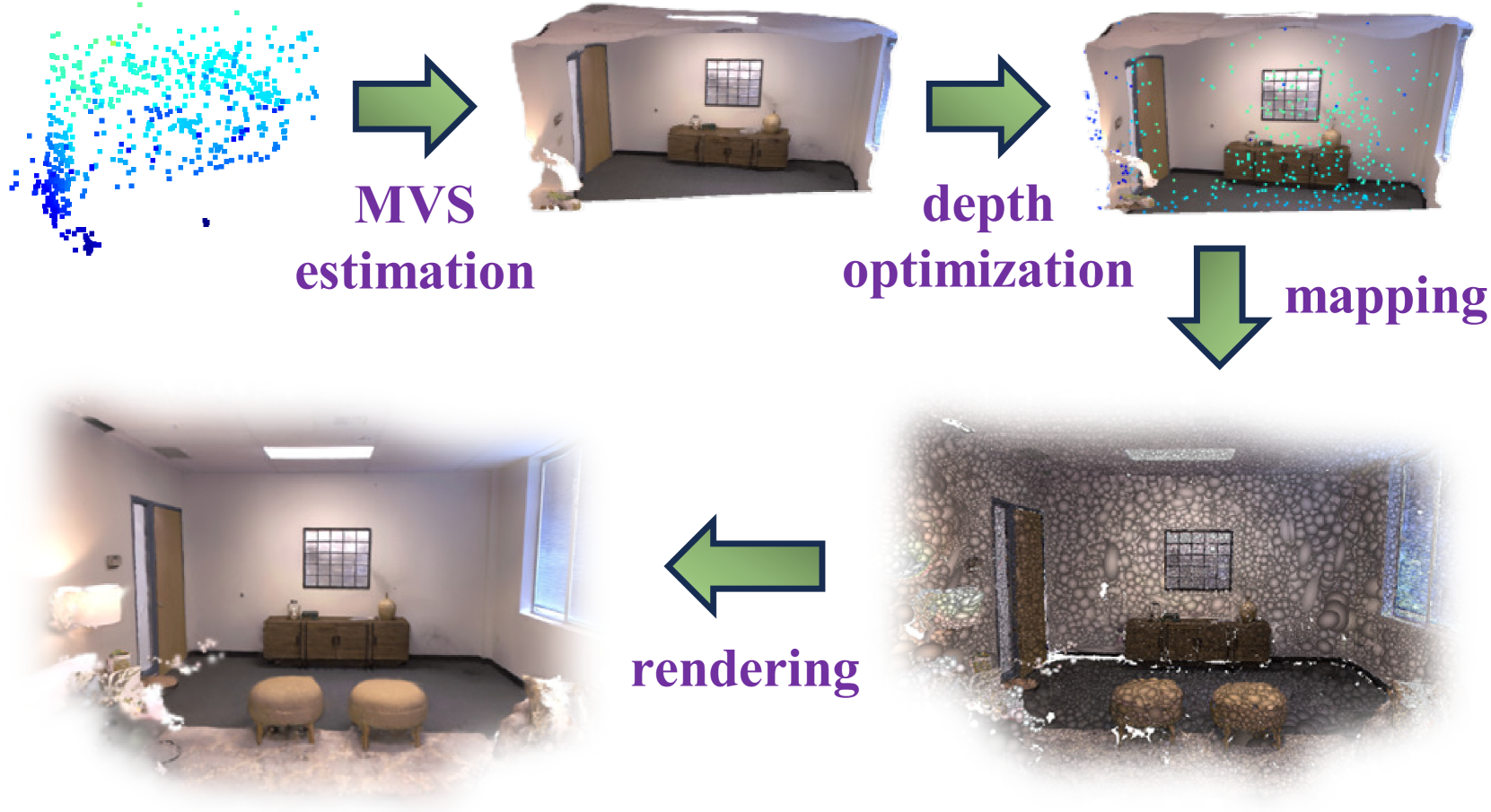
This letter introduces a novel framework for dense Visual Simultaneous Localization and Mapping (VSLAM) based on Gaussian Splatting. Recently, SLAM based on Gaussian Splatting has shown promising results. However, in monocular scenarios, the Gaussian maps reconstructed lack geometric accuracy and exhibit weaker tracking capability. To address these limitations, we jointly optimize sparse visual odometry tracking and 3D Gaussian Splatting scene representation for the first time. We obtain depth maps on visual odometry keyframe windows using a fast Multi-View Stereo (MVS) network for the geometric supervision of Gaussian maps. Furthermore, we propose a depth smooth loss and Sparse-Dense Adjustment Ring (SDAR) to reduce the negative effect of estimated depth maps and preserve the consistency in scale between the visual odometry and Gaussian maps. We have evaluated our system across various synthetic and real-world datasets. The accuracy of our pose estimation surpasses existing methods and achieves state-of-the-art. Additionally, it outperforms previous monocular methods in terms of novel view synthesis and geometric reconstruction fidelities.
Read more9/11/2024
🧠
0
Loopy-SLAM: Dense Neural SLAM with Loop Closures
Lorenzo Liso, Erik Sandstrom, Vladimir Yugay, Luc Van Gool, Martin R. Oswald
Neural RGBD SLAM techniques have shown promise in dense Simultaneous Localization And Mapping (SLAM), yet face challenges such as error accumulation during camera tracking resulting in distorted maps. In response, we introduce Loopy-SLAM that globally optimizes poses and the dense 3D model. We use frame-to-model tracking using a data-driven point-based submap generation method and trigger loop closures online by performing global place recognition. Robust pose graph optimization is used to rigidly align the local submaps. As our representation is point based, map corrections can be performed efficiently without the need to store the entire history of input frames used for mapping as typically required by methods employing a grid based mapping structure. Evaluation on the synthetic Replica and real-world TUM-RGBD and ScanNet datasets demonstrate competitive or superior performance in tracking, mapping, and rendering accuracy when compared to existing dense neural RGBD SLAM methods. Project page: notchla.github.io/Loopy-SLAM.
Read more6/11/2024