More Efficient Randomized Exploration for Reinforcement Learning via Approximate Sampling

0

Sign in to get full access
Overview
- This paper proposes a new method for efficient randomized exploration in reinforcement learning (RL) tasks.
- The method, called Approximate Sampling, aims to improve upon existing exploration techniques like epsilon-greedy and Thompson Sampling.
- It uses an approximate sampling approach to efficiently explore the state-action space, leading to faster convergence and better performance compared to previous methods.
- The paper also includes a theoretical analysis of the proposed method and demonstrates its effectiveness through experiments on various RL benchmarks.
Plain English Explanation
In reinforcement learning, an agent needs to explore its environment to find the best actions to take in order to maximize rewards. Traditional exploration methods like epsilon-greedy and Thompson Sampling can be inefficient, as they may waste time exploring suboptimal actions.
The new Approximate Sampling method proposed in this paper aims to explore the environment more efficiently. Instead of randomly selecting actions, it uses an approximate sampling approach to focus the exploration on more promising areas of the state-action space. This allows the agent to learn the optimal strategy faster, leading to better overall performance.
The key idea is to use a simplified model of the environment to guide the exploration process. By making some reasonable approximations, the agent can quickly identify the most important areas to explore, without wasting time on less relevant actions. This is like a human explorer using a map to plan their journey, rather than just wandering around blindly.
The paper provides a detailed mathematical analysis of the Approximate Sampling method, showing that it has strong theoretical guarantees in terms of convergence and regret bounds. The authors also demonstrate its effectiveness through experiments on a variety of reinforcement learning benchmarks, where it outperforms previous exploration techniques.
Technical Explanation
The paper introduces a new exploration method called Approximate Sampling (AS) for reinforcement learning. The key idea is to use an approximate model of the environment to guide the exploration process, rather than relying on more traditional approaches like epsilon-greedy or Thompson Sampling.
The AS method works as follows:
- The agent maintains an approximate model of the environment, which is updated as the agent interacts with the environment.
- At each time step, the agent uses this approximate model to estimate the expected reward for each possible action.
- The agent then selects the action with the highest estimated reward, but with some random perturbation to encourage exploration.
This approach is designed to balance exploration and exploitation more effectively than previous methods. By using the approximate model to guide the exploration, the agent can focus its efforts on the most promising areas of the state-action space, leading to faster convergence to the optimal policy.
The authors provide a theoretical analysis of the AS method, proving bounds on the expected regret (the difference between the optimal reward and the agent's cumulative reward) and showing that it converges to the optimal policy under certain assumptions.
To evaluate the practical performance of AS, the authors conduct experiments on a variety of reinforcement learning benchmarks, including classic control tasks and more complex multi-agent environments. The results demonstrate that AS outperforms both epsilon-greedy and Thompson Sampling in terms of cumulative reward and convergence speed.
Critical Analysis
The Approximate Sampling method proposed in this paper represents an interesting and promising approach to improving exploration in reinforcement learning. By using an approximate model of the environment to guide the exploration process, the method seems to offer significant advantages over traditional exploration techniques.
One potential limitation of the method is the requirement to maintain and update an approximate model of the environment. This additional computational overhead may be a concern, especially in complex or high-dimensional environments. The authors do not provide a detailed analysis of the computational complexity or the sensitivity of the method to the accuracy of the approximate model.
Additionally, the theoretical analysis in the paper relies on several assumptions, such as the availability of a generative model of the environment and the existence of a unique optimal policy. In more realistic scenarios, these assumptions may not hold, and the performance of the AS method may be affected.
It would be useful to see the method tested on a wider range of reinforcement learning problems, including more complex and realistic environments. This would help to better understand the strengths and limitations of the Approximate Sampling approach and identify any potential issues or areas for further research.
Overall, the paper presents an innovative approach to exploration in reinforcement learning, and the results are promising. However, further research and evaluation would be needed to fully assess the practical applicability and robustness of the method.
Conclusion
The paper proposes a new exploration method called Approximate Sampling (AS) for reinforcement learning, which aims to improve upon existing techniques like epsilon-greedy and Thompson Sampling. The key idea is to use an approximate model of the environment to guide the exploration process, allowing the agent to focus its efforts on the most promising areas of the state-action space.
The authors provide a theoretical analysis of the AS method, proving bounds on the expected regret and showing that it converges to the optimal policy under certain assumptions. They also demonstrate the practical performance of AS through experiments on various reinforcement learning benchmarks, where it outperforms previous exploration techniques.
While the Approximate Sampling method shows promise, the paper also highlights some potential limitations, such as the computational overhead of maintaining an approximate model and the reliance on certain assumptions that may not hold in more realistic scenarios. Further research and evaluation would be needed to fully assess the method's robustness and practical applicability.
Overall, the paper presents an interesting and innovative approach to exploration in reinforcement learning, and the results suggest that the Approximate Sampling method could be a valuable addition to the toolbox of reinforcement learning practitioners.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
More Efficient Randomized Exploration for Reinforcement Learning via Approximate Sampling
Haque Ishfaq, Yixin Tan, Yu Yang, Qingfeng Lan, Jianfeng Lu, A. Rupam Mahmood, Doina Precup, Pan Xu
Thompson sampling (TS) is one of the most popular exploration techniques in reinforcement learning (RL). However, most TS algorithms with theoretical guarantees are difficult to implement and not generalizable to Deep RL. While the emerging approximate sampling-based exploration schemes are promising, most existing algorithms are specific to linear Markov Decision Processes (MDP) with suboptimal regret bounds, or only use the most basic samplers such as Langevin Monte Carlo. In this work, we propose an algorithmic framework that incorporates different approximate sampling methods with the recently proposed Feel-Good Thompson Sampling (FGTS) approach (Zhang, 2022; Dann et al., 2021), which was previously known to be computationally intractable in general. When applied to linear MDPs, our regret analysis yields the best known dependency of regret on dimensionality, surpassing existing randomized algorithms. Additionally, we provide explicit sampling complexity for each employed sampler. Empirically, we show that in tasks where deep exploration is necessary, our proposed algorithms that combine FGTS and approximate sampling perform significantly better compared to other strong baselines. On several challenging games from the Atari 57 suite, our algorithms achieve performance that is either better than or on par with other strong baselines from the deep RL literature.
Read more6/19/2024
➖
0
Distilled Thompson Sampling: Practical and Efficient Thompson Sampling via Imitation Learning
Hongseok Namkoong, Samuel Daulton, Eytan Bakshy
Thompson sampling (TS) has emerged as a robust technique for contextual bandit problems. However, TS requires posterior inference and optimization for action generation, prohibiting its use in many online platforms where latency and ease of deployment are of concern. We operationalize TS by proposing a novel imitation-learning-based algorithm that distills a TS policy into an explicit policy representation, allowing fast decision-making and easy deployment in mobile and server-based environments. Using batched data collected under the imitation policy, our algorithm iteratively performs offline updates to the TS policy, and learns a new explicit policy representation to imitate it. Empirically, our imitation policy achieves performance comparable to batch TS while allowing more than an order of magnitude reduction in decision-time latency. Buoyed by low latency and simplicity of implementation, our algorithm has been successfully deployed in multiple video upload systems for Meta. Using a randomized controlled trial, we show our algorithm resulted in significant improvements in video quality and watch time.
Read more7/23/2024

0
Graph Neural Thompson Sampling
Shuang Wu, Arash A. Amini
We consider an online decision-making problem with a reward function defined over graph-structured data. We formally formulate the problem as an instance of graph action bandit. We then propose texttt{GNN-TS}, a Graph Neural Network (GNN) powered Thompson Sampling (TS) algorithm which employs a GNN approximator for estimating the mean reward function and the graph neural tangent features for uncertainty estimation. We prove that, under certain boundness assumptions on the reward function, GNN-TS achieves a state-of-the-art regret bound which is (1) sub-linear of order $tilde{mathcal{O}}((tilde{d} T)^{1/2})$ in the number of interaction rounds, $T$, and a notion of effective dimension $tilde{d}$, and (2) independent of the number of graph nodes. Empirical results validate that our proposed texttt{GNN-TS} exhibits competitive performance and scales well on graph action bandit problems.
Read more6/24/2024
0
Epsilon-Greedy Thompson Sampling to Bayesian Optimization
Bach Do, Taiwo Adebiyi, Ruda Zhang
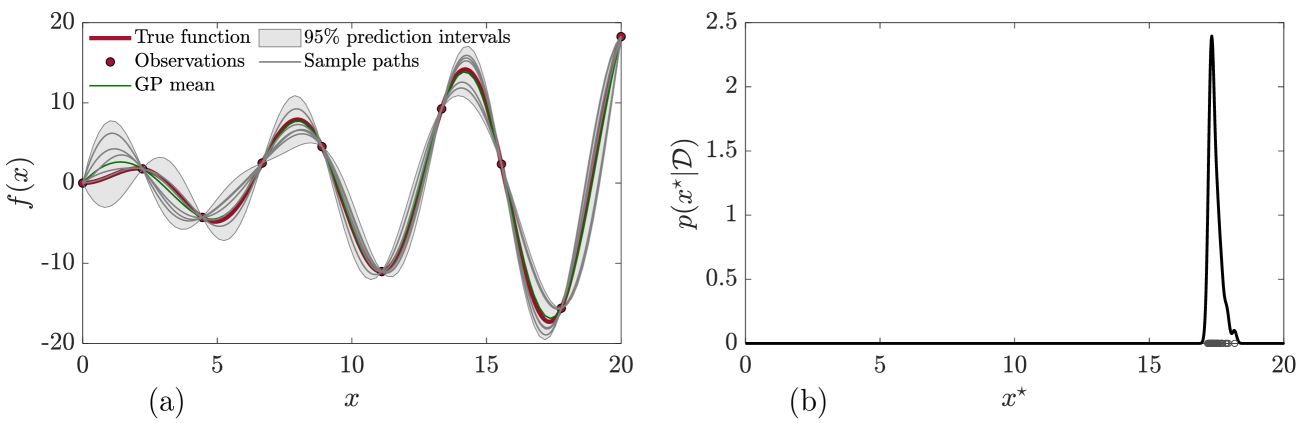
Bayesian optimization (BO) has become a powerful tool for solving simulation-based engineering optimization problems thanks to its ability to integrate physical and mathematical understandings, consider uncertainty, and address the exploitation--exploration dilemma. Thompson sampling (TS) is a preferred solution for BO to handle the exploitation--exploration trade-off. While it prioritizes exploration by generating and minimizing random sample paths from probabilistic models -- a fundamental ingredient of BO -- TS weakly manages exploitation by gathering information about the true objective function after it obtains new observations. In this work, we improve the exploitation of TS by incorporating the $varepsilon$-greedy policy, a well-established selection strategy in reinforcement learning. We first delineate two extremes of TS, namely the generic TS and the sample-average TS. The former promotes exploration, while the latter favors exploitation. We then adopt the $varepsilon$-greedy policy to randomly switch between these two extremes. Small and large values of $varepsilon$ govern exploitation and exploration, respectively. By minimizing two benchmark functions and solving an inverse problem of a steel cantilever beam,we empirically show that $varepsilon$-greedy TS equipped with an appropriate $varepsilon$ is more robust than its two extremes,matching or outperforming the better of the generic TS and the sample-average TS.
Read more5/7/2024