Morphing median fin enhances untethered bionic robotic tuna's linear acceleration and turning maneuverability

0
✨
Sign in to get full access
Overview
- Median fins of fish-like swimmers play a crucial role in linear acceleration and maneuvering processes.
- Researchers developed a free-swimming bionic tuna with a foldable dorsal fin to study the impacts of median fin movements.
- Key findings include:
- Erecting the dorsal fin can reduce head heave, enhance linear acceleration, increase turning angular velocity, and decrease turning radius.
- Erecting the dorsal fin also increases wetted surface area, leading to decreased maximum speed and efficiency during steady swimming.
- Folding the median fins after acceleration does not significantly affect locomotion efficiency.
Plain English Explanation
The median fins of fish-like animals, such as the dorsal fin, play an important role in how they move forward and turn. However, few research focused on untethered robotic fish experiments. To better understand this, researchers created a robotic tuna that can swim freely and has a dorsal fin that can fold up and down.
When the robotic tuna's dorsal fin is raised, it can reduce the up-and-down movement of the "head" (front) by 50%, make it accelerate forward 15.7% faster, turn 32.78% faster, and turn in a 33.13% tighter circle. This is because the raised fin helps with maneuvering and speeding up.
However, raising the dorsal fin also increases the overall wet surface area, which makes the robot swim at a lower top speed and with less efficiency during steady swimming. This partially explains why real tuna raise their median fins when accelerating or turning, then fold them back down to reduce drag afterwards.
Additionally, the researchers found that folding the median fins after acceleration doesn't significantly impact how efficiently the robot can swim. This supports the use of morphing median fins in underwater robots and helps us better understand how median fins affect fish movement.
Technical Explanation
The researchers developed a free-swimming bionic tuna robot with a foldable dorsal fin to study the impacts of median fin movements on linear acceleration and maneuvering. During experiments, they found that erecting the dorsal fin at proper conditions can:
- Reduce head heave (up-and-down movement of the front) by 50%
- Enhance linear acceleration by 15.7%
- Increase turning angular velocity by 32.78%
- Decrease turning radius by 33.13%
This is because the raised dorsal fin helps with propulsion and control during dynamic maneuvers. However, erecting the fin also increases the wetted surface area, resulting in decreased maximum speed and efficiency during the steady swimming phase.
This finding aligns with the behavior of real tuna, which tend to erect their median fins during acceleration or turning, then fold them back down to reduce drag. The researchers also verified that folding the median fins after acceleration does not significantly impact locomotion efficiency.
These insights support the application of morphing median fins in undulating underwater robots and contribute to a better understanding of how median fins affect fish locomotion.
Critical Analysis
The researchers provide valuable empirical data on the impacts of median fin movements in a free-swimming robotic fish model. This helps bridge the gap between previous tethered experiments and real-world fish locomotion.
However, the study is limited to a single robotic platform and specific fin configurations. Additional research is needed to generalize the findings across different fish morphologies, swimming modes, and environmental conditions. Further work is also required to develop highly agile flat swimming robots that can better replicate the maneuverability of natural swimmers.
The researchers acknowledge that the trade-off between maneuvering performance and steady-state efficiency is an important area for continued investigation. Efficient navigation of robotic fish across vortical flows may also depend on a more nuanced understanding of median fin function.
Overall, this study provides a solid foundation for applying bio-inspired median fin mechanisms in underwater robotics. With further refinement and real-world validation, such systems could enable a new generation of highly capable aquatic vehicles.
Conclusion
This research demonstrates the significant impact that median fins, such as the dorsal fin, can have on the linear acceleration, maneuvering, and efficiency of fish-like swimmers. By developing a free-swimming robotic tuna with a foldable dorsal fin, the researchers were able to quantify the performance benefits of raising the fin during dynamic maneuvers, as well as the trade-offs in terms of reduced top speed and steady-state efficiency.
The findings partially explain the behavior of real tuna, which erect their median fins when accelerating or turning, then fold them back down to reduce drag. This study supports the application of morphing median fins in undulating underwater robots and contributes to a deeper understanding of how these important control surfaces affect fish locomotion. With further research and development, bio-inspired median fin mechanisms could unlock new levels of agility and efficiency in aquatic robotic systems.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
✨
0
Morphing median fin enhances untethered bionic robotic tuna's linear acceleration and turning maneuverability
Hongbin Huang, Zhonglu Lin, Wei Zheng, Jinhu Zhang, Zhibin Liu, Wei Zhou, Yu Zhang
Median fins of fish-like swimmers play a crucial role in linear acceleration and maneuvering processes. However, few research focused on untethered robotic fish experiments. Imitating the behaviour of real tuna, we developed a free-swimming bionic tuna with a foldable dorsal fin. The erection of dorsal fin, at proper conditions, can reduce head heave by 50%, enhance linear acceleration by 15.7%, increase turning angular velocity by 32.78%, and turning radius decreasing by 33.13%. Conversely, erecting the dorsal fin increases the wetted surface area, resulting in decreased maximum speed and efficiency during steady swimming phase. This finding partially explains why tuna erect their median fins during maneuvers or acceleration and fold them afterward to reduce drag. In addition, we verified that folding the median fins after acceleration does not significantly affect locomotion efficiency. This study supports the application of morphing median fins in undulating underwater robots and helps to further understand the impact of median fins on fish locomotion.
Read more7/29/2024
0
Fin ray-inspired, Origami, Small Scale Actuator for Fin Manipulation in Aquatic Bioinspired Robots
Minh Vu, Revathy Ravuri, Angus Muir, Charles Mackie, Andrew Weightman, Simon Watson, Tim J. Echtermeyer
Fish locomotion is enabled by fin rays-actively deformable boney rods, which manipulate the fin to facilitate complex interaction with surrounding water and enable propulsion. Replicating the performance and kinematics of the biological fin ray from an engineering perspective is a challenging task and has not been realised thus far. This work introduces a prototype of a fin ray-inspired origami electromagnetic tendon-driven (FOLD) actuator, designed to emulate the functional dynamics of fish fin rays. Constructed in minutes using origami/kirigami and paper joinery techniques from flat laser-cut polypropylene film, this actuator is low-cost at {pounds}0.80 ($1), simple to assemble, and durable for over one million cycles. We leverage its small size to embed eight into two fin membranes of a 135 mm long cuttlefish robot capable of four degrees of freedom swimming. We present an extensive kinematic and swimming parametric study with 1015 data points from 7.6 hours of video, which has been used to determine optimal kinematic parameters and validate theoretical constants observed in aquatic animals. Notably, the study explores the nuanced interplay between undulation patterns, power distribution, and locomotion efficiency, underscoring the potential of the actuator as a model system for the investigation of energy-efficient propulsion and control of bioinspired systems. The versatility of the actuator is further demonstrated by its integration into a fish and a jellyfish.
Read more7/25/2024
🌐
0
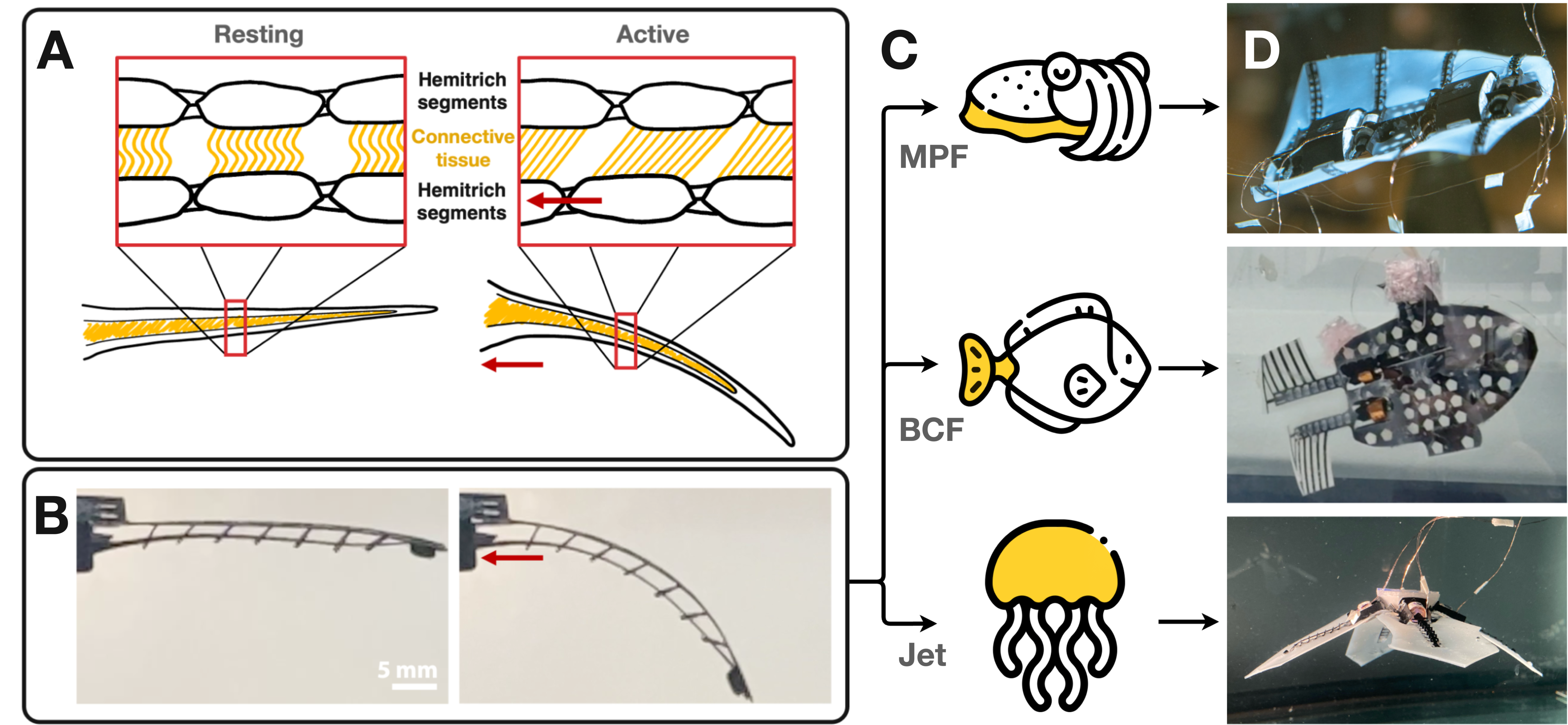
Accelerating Aquatic Soft Robots with Elastic Instability Effects
Zechen Xiong, Suyu Luohong, Jeong Hun Lee, Hod Lipson
Sinusoidal undulation has long been considered the most successful swimming pattern for fish and bionic aquatic robots [1]. However, a swimming pattern generated by the hair clip mechanism (HCM, part iii, Figure 1A) [2]~[5] may challenge this knowledge. HCM is an in-plane prestressed bi-stable mechanism that stores elastic energy and releases the stored energy quickly via its snap-through buckling. When used for fish robots, the HCM functions as the fish body and creates unique swimming patterns that we term HCM undulation. With the same energy consumption [3], HCM fish outperforms the traditionally designed soft fish with a two-fold increase in cruising speed. We reproduce this phenomenon in a single-link simulation with Aquarium [6]. HCM undulation generates an average propulsion of 16.7 N/m, 2-3 times larger than the reference undulation (6.78 N/m), sine pattern (5.34 N/m/s), and cambering sine pattern (6.36 N/m), and achieves an efficiency close to the sine pattern. These results can aid in developing fish robots and faster swimming patterns.
Read more7/16/2024

0
Design of a Double-joint Robotic Fish Using a Composite Linkage
Ruijia Zhang, Wenke Zhou, Min Li, Miao Li
Robotic fish is one of the most promising directions of the new generation of underwater vehicles. Traditional biomimetic fish often mimic fish joints using tandem components like servos, which leads to increased volume, weight and control complexity. In this paper, a new double-joint robotic fish using a composite linkage was designed, where the propulsion mechanism transforms the single-degree-of-freedom rotation of the motor into a double-degree-of-freedom coupled motion, namely caudal peduncle translation and caudal fin rotation. Motion analysis of the propulsion mechanism demonstrates its ability to closely emulate the undulating movement observed in carangiform fish. Experimental results further validate the feasibility of the proposed propulsion mechanism. To improve propulsion efficiency, an analysis is conducted to explore the influence of swing angle amplitude and swing frequency on the swimming speed of the robotic fish. This examination establishes a practical foundation for future research on such robotic fish systems.
Read more8/14/2024