Motion Primitives Planning For Center-Articulated Vehicles
2405.17127
0
0

Abstract
Autonomous navigation across unstructured terrains, including forests and construction areas, faces unique challenges due to intricate obstacles and the element of the unknown. Lacking pre-existing maps, these scenarios necessitate a motion planning approach that combines agility with efficiency. Critically, it must also incorporate the robot's kinematic constraints to navigate more effectively through complex environments. This work introduces a novel planning method for center-articulated vehicles (CAV), leveraging motion primitives within a receding horizon planning framework using onboard sensing. The approach commences with the offline creation of motion primitives, generated through forward simulations that reflect the distinct kinematic model of center-articulated vehicles. These primitives undergo evaluation through a heuristic-based scoring function, facilitating the selection of the most suitable path for real-time navigation. To augment this planning process, we develop a pose-stabilizing controller, tailored to the kinematic specifications of center-articulated vehicles. During experiments, our method demonstrates a $67%$ improvement in SPL (Success Rate weighted by Path Length) performance over existing strategies. Furthermore, its efficacy was validated through real-world experiments conducted with a tree harvester vehicle - SAHA.
Create account to get full access
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers

Real-time Motion Planning for autonomous vehicles in dynamic environments
Mohammad Dehghani Tezerjani, Dominic Carrillo, Deyuan Qu, Sudip Dhakal, Amir Mirzaeinia, Qing Yang
0
0
Recent advancements in self-driving car technologies have enabled them to navigate autonomously through various environments. However, one of the critical challenges in autonomous vehicle operation is trajectory planning, especially in dynamic environments with moving obstacles. This research aims to tackle this challenge by proposing a robust algorithm tailored for autonomous cars operating in dynamic environments with moving obstacles. The algorithm introduces two main innovations. Firstly, it defines path density by adjusting the number of waypoints along the trajectory, optimizing their distribution for accuracy in curved areas and reducing computational complexity in straight sections. Secondly, it integrates hierarchical motion planning algorithms, combining global planning with an enhanced $A^*$ graph-based method and local planning using the time elastic band algorithm with moving obstacle detection considering different motion models. The proposed algorithm is adaptable for different vehicle types and mobile robots, making it versatile for real-world applications. Simulation results demonstrate its effectiveness across various conditions, promising safer and more efficient navigation for autonomous vehicles in dynamic environments. These modifications significantly improve trajectory planning capabilities, addressing a crucial aspect of autonomous vehicle technology.
6/6/2024
Towards A General-Purpose Motion Planning for Autonomous Vehicles Using Fluid Dynamics
MReza Alipour Sormoli, Konstantinos Koufos, Mehrdad Dianati, Roger Woodman
0
0
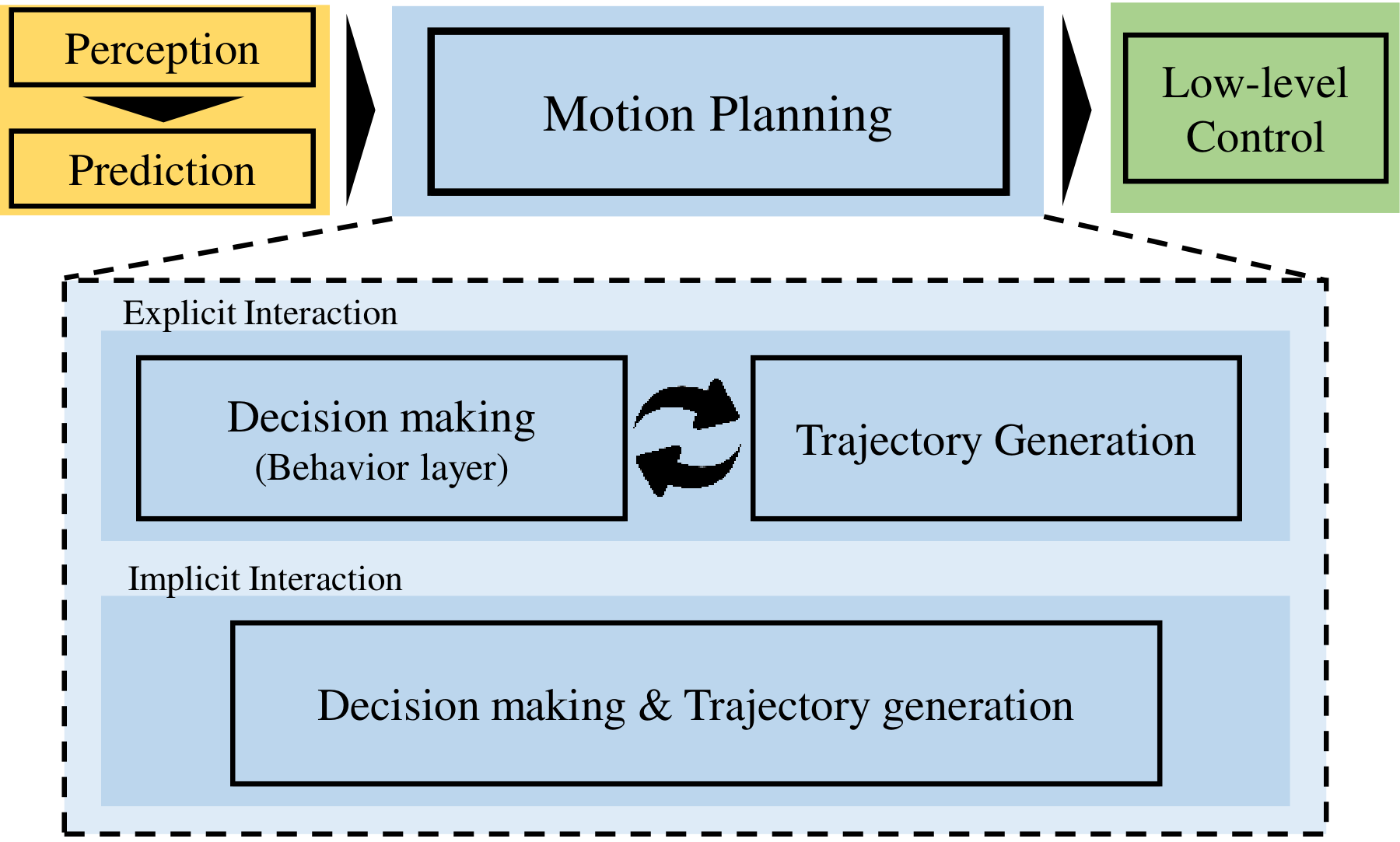
General-purpose motion planners for automated/autonomous vehicles promise to handle the task of motion planning (including tactical decision-making and trajectory generation) for various automated driving functions (ADF) in a diverse range of operational design domains (ODDs). The challenges of designing a general-purpose motion planner arise from several factors: a) A plethora of scenarios with different semantic information in each driving scene should be addressed, b) a strong coupling between long-term decision-making and short-term trajectory generation shall be taken into account, c) the nonholonomic constraints of the vehicle dynamics must be considered, and d) the motion planner must be computationally efficient to run in real-time. The existing methods in the literature are either limited to specific scenarios (logic-based) or are data-driven (learning-based) and therefore lack explainability, which is important for safety-critical automated driving systems (ADS). This paper proposes a novel general-purpose motion planning solution for ADS inspired by the theory of fluid mechanics. A computationally efficient technique, i.e., the lattice Boltzmann method, is then adopted to generate a spatiotemporal vector field, which in accordance with the nonholonomic dynamic model of the Ego vehicle is employed to generate feasible candidate trajectories. The trajectory optimising ride quality, efficiency and safety is finally selected to calculate the imminent control signals, i.e., throttle/brake and steering angle. The performance of the proposed approach is evaluated by simulations in highway driving, on-ramp merging, and intersection crossing scenarios, and it is found to outperform traditional motion planning solutions based on model predictive control (MPC).
6/11/2024
Motion planning for off-road autonomous driving based on human-like cognition and weight adaptation
Yuchun Wang, Cheng Gong, Jianwei Gong, Peng Jia
0
0
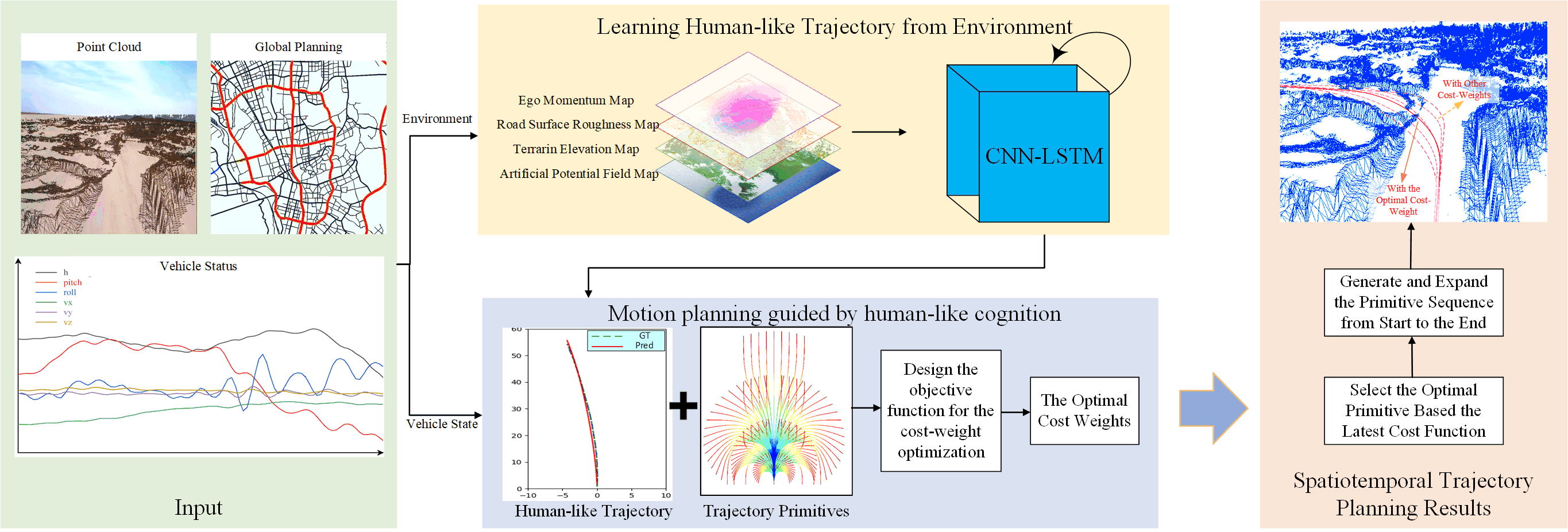
Driving in an off-road environment is challenging for autonomous vehicles due to the complex and varied terrain. To ensure stable and efficient travel, the vehicle requires consideration and balancing of environmental factors, such as undulations, roughness, and obstacles, to generate optimal trajectories that can adapt to changing scenarios. However, traditional motion planners often utilize a fixed cost function for trajectory optimization, making it difficult to adapt to different driving strategies in challenging irregular terrains and uncommon scenarios. To address these issues, we propose an adaptive motion planner based on human-like cognition and cost evaluation for off-road driving. First, we construct a multi-layer map describing different features of off-road terrains, including terrain elevation, roughness, obstacle, and artificial potential field map. Subsequently, we employ a CNN-LSTM network to learn the trajectories planned by human drivers in various off-road scenarios. Then, based on human-like generated trajectories in different environments, we design a primitive-based trajectory planner that aims to mimic human trajectories and cost weight selection, generating trajectories that are consistent with the dynamics of off-road vehicles. Finally, we compute optimal cost weights and select and extend behavioral primitives to generate highly adaptive, stable, and efficient trajectories. We validate the effectiveness of the proposed method through experiments in a desert off-road environment with complex terrain and varying road conditions. The experimental results show that the proposed human-like motion planner has excellent adaptability to different off-road conditions. It shows real-time operation, greater stability, and more human-like planning ability in diverse and challenging scenarios.
4/30/2024
Interaction-Aware Vehicle Motion Planning with Collision Avoidance Constraints in Highway Traffic
Dongryul Kim, Hyeonjeong Kim, Kyoungseok Han
0
0
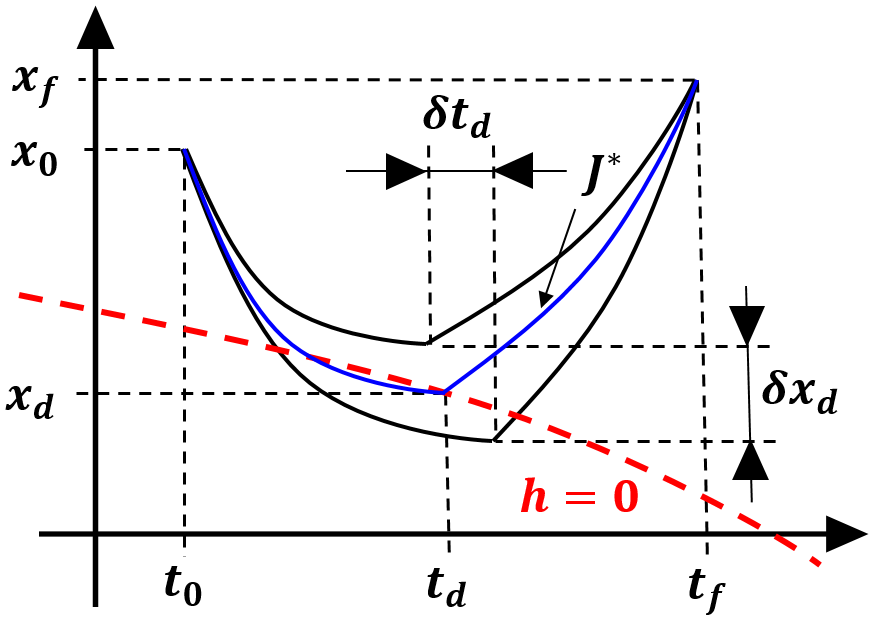
This paper proposes collision-free optimal trajectory planning for autonomous vehicles in highway traffic, where vehicles need to deal with the interaction among each other. To address this issue, a novel optimal control framework is suggested, which couples the trajectory of surrounding vehicles with collision avoidance constraints. Additionally, we describe a trajectory optimization technique under state constraints, utilizing a planner based on Pontryagin's Minimum Principle, capable of numerically solving collision avoidance scenarios with surrounding vehicles. Simulation results demonstrate the effectiveness of the proposed approach regarding interaction-based motion planning for different scenarios.
4/3/2024