Movement Primitive Diffusion: Learning Gentle Robotic Manipulation of Deformable Objects

0
✅
Sign in to get full access
Overview
- Introduces a new method called Movement Primitive Diffusion (MPD) for imitation learning in robot-assisted surgery (RAS)
- MPD combines the versatility of diffusion-based imitation learning (DIL) with the high-quality motion generation capabilities of Probabilistic Dynamic Movement Primitives (ProDMPs)
- This enables gentle manipulation of deformable objects while maintaining data efficiency, which is critical for RAS where demonstration data is scarce
- MPD outperforms state-of-the-art DIL methods in success rate, motion quality, and data efficiency
Plain English Explanation
Robot-assisted surgery (RAS) requires delicate and precise control of robotic tools to safely manipulate soft, deformable objects like human tissue. Existing policy learning methods often struggle to generate the desired high-quality motion for these surgical tasks, especially when there is limited training data available.
To address this, the researchers developed a new approach called Movement Primitive Diffusion (MPD). MPD combines the strengths of two existing techniques: diffusion-based imitation learning (DIL) and Probabilistic Dynamic Movement Primitives (ProDMPs).
DIL is a versatile method that can learn complex behaviors from limited data, but the generated motions may not be as smooth and natural as desired for delicate surgical tasks. ProDMPs, on the other hand, are great at producing high-quality, human-like motions, but they require more training data.
By combining these two approaches, MPD can achieve the best of both worlds - the data efficiency of DIL and the motion quality of ProDMPs. This allows MPD to learn gentle manipulation skills for deformable objects, even when only a small amount of demonstration data is available, which is crucial for many RAS applications.
The researchers evaluate MPD on a variety of simulated and real-world robotic tasks, and show that it outperforms state-of-the-art DIL methods in terms of success rate, motion quality, and data efficiency.
Technical Explanation
The key idea behind MPD is to leverage the strengths of diffusion-based imitation learning (DIL) and Probabilistic Dynamic Movement Primitives (ProDMPs) to enable data-efficient and high-quality motion generation for delicate manipulation tasks in robot-assisted surgery (RAS).
DIL is a powerful technique that can learn complex behaviors from limited data by modeling the transition dynamics of an optimal policy using a diffusion process. However, the motions generated by DIL may not always exhibit the smoothness and natural qualities desired for surgical interventions.
To address this, the researchers integrate ProDMPs into the DIL framework. ProDMPs are a type of dynamic movement primitive that can generate human-like, high-quality motions. By combining DIL with ProDMPs, MPD can achieve both data efficiency and motion quality.
The MPD method works as follows: First, it learns a diffusion model that captures the transition dynamics of an optimal policy from a small set of demonstration data. Then, it uses this diffusion model to sample high-quality motions in the form of ProDMPs, which can be executed by the robot to manipulate deformable objects.
The researchers evaluate MPD across various simulated and real-world robotic tasks, including manipulation of deformable objects. They compare MPD to state-of-the-art DIL methods and show that it outperforms them in terms of success rate, motion quality, and data efficiency.
Critical Analysis
The researchers acknowledge that while MPD demonstrates impressive results, there are still some limitations and areas for future work:
- The current implementation of MPD is limited to manipulation of relatively simple deformable objects. Extending it to more complex, realistic surgical scenarios with greater object and environmental complexity would be an important next step.
- The paper does not provide a detailed comparison of MPD's performance to other imitation learning approaches beyond DIL methods, such as physics-based character animation via diffusion or logic-based dynamic movement primitives for long-horizon manipulation. Evaluating MPD against a broader range of baselines would further strengthen the claims about its superiority.
- The researchers note that MPD currently requires a significant amount of tuning and hyperparameter selection to achieve optimal performance. Developing more robust and automated hyperparameter optimization methods could improve the practicality of MPD for real-world deployment.
Overall, the MPD method represents a promising step forward in enabling data-efficient and high-quality imitation learning for delicate manipulation tasks in robot-assisted surgery. However, further research and validation on more complex and realistic scenarios would be valuable to fully assess the method's capabilities and limitations.
Conclusion
The Movement Primitive Diffusion (MPD) method introduced in this paper addresses a key challenge in robot-assisted surgery (RAS) - the need for data-efficient and versatile policy learning techniques that can generate high-quality motion for delicate manipulation of deformable objects.
By combining the strengths of diffusion-based imitation learning (DIL) and Probabilistic Dynamic Movement Primitives (ProDMPs), MPD achieves both data efficiency and motion quality, outperforming state-of-the-art DIL methods. This advance in imitation learning could have significant implications for improving the safety and precision of robotic surgical interventions, where demonstration data is often scarce.
While MPD shows promising results, further research is needed to extend the method to more complex surgical scenarios and to compare its performance against a broader range of imitation learning techniques. Nonetheless, the core ideas behind MPD represent an important step forward in developing more capable and reliable robot-assisted surgery systems.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
✅
0
Movement Primitive Diffusion: Learning Gentle Robotic Manipulation of Deformable Objects
Paul Maria Scheikl, Nicolas Schreiber, Christoph Haas, Niklas Freymuth, Gerhard Neumann, Rudolf Lioutikov, Franziska Mathis-Ullrich
Policy learning in robot-assisted surgery (RAS) lacks data efficient and versatile methods that exhibit the desired motion quality for delicate surgical interventions. To this end, we introduce Movement Primitive Diffusion (MPD), a novel method for imitation learning (IL) in RAS that focuses on gentle manipulation of deformable objects. The approach combines the versatility of diffusion-based imitation learning (DIL) with the high-quality motion generation capabilities of Probabilistic Dynamic Movement Primitives (ProDMPs). This combination enables MPD to achieve gentle manipulation of deformable objects, while maintaining data efficiency critical for RAS applications where demonstration data is scarce. We evaluate MPD across various simulated and real world robotic tasks on both state and image observations. MPD outperforms state-of-the-art DIL methods in success rate, motion quality, and data efficiency. Project page: https://scheiklp.github.io/movement-primitive-diffusion/
Read more6/11/2024
🏅
0
Using Implicit Behavior Cloning and Dynamic Movement Primitive to Facilitate Reinforcement Learning for Robot Motion Planning
Zengjie Zhang, Jayden Hong, Amir Soufi Enayati, Homayoun Najjaran
Reinforcement learning (RL) for motion planning of multi-degree-of-freedom robots still suffers from low efficiency in terms of slow training speed and poor generalizability. In this paper, we propose a novel RL-based robot motion planning framework that uses implicit behavior cloning (IBC) and dynamic movement primitive (DMP) to improve the training speed and generalizability of an off-policy RL agent. IBC utilizes human demonstration data to leverage the training speed of RL, and DMP serves as a heuristic model that transfers motion planning into a simpler planning space. To support this, we also create a human demonstration dataset using a pick-and-place experiment that can be used for similar studies. Comparison studies in simulation reveal the advantage of the proposed method over the conventional RL agents with faster training speed and higher scores. A real-robot experiment indicates the applicability of the proposed method to a simple assembly task. Our work provides a novel perspective on using motion primitives and human demonstration to leverage the performance of RL for robot applications.
Read more8/20/2024
🛸
0
A Unified Formulation of Geometry-aware Dynamic Movement Primitives
Fares J. Abu-Dakka, Matteo Saveriano, Ville Kyrki
Learning from demonstration (LfD) is considered as an efficient way to transfer skills from humans to robots. Traditionally, LfD has been used to transfer Cartesian and joint positions and forces from human demonstrations. The traditional approach works well for some robotic tasks, but for many tasks of interest, it is necessary to learn skills such as orientation, impedance, and/or manipulability that have specific geometric characteristics. An effective encoding of such skills can be only achieved if the underlying geometric structure of the skill manifold is considered and the constrains arising from this structure are fulfilled during both learning and execution. However, typical learned skill models such as dynamic movement primitives (DMPs) are limited to Euclidean data and fail in correctly embedding quantities with geometric constraints. In this paper, we propose a novel and mathematically principled framework that uses concepts from Riemannian geometry to allow DMPs to properly embed geometric constrains. The resulting DMP formulation can deal with data sampled from any Riemannian manifold including, but not limited to, unit quaternions and symmetric and positive definite matrices. The proposed approach has been extensively evaluated both on simulated data and real robot experiments. The performed evaluation demonstrates that beneficial properties of DMPs, such as convergence to a given goal and the possibility to change the goal during operation, apply also to the proposed formulation.
Read more7/31/2024
0
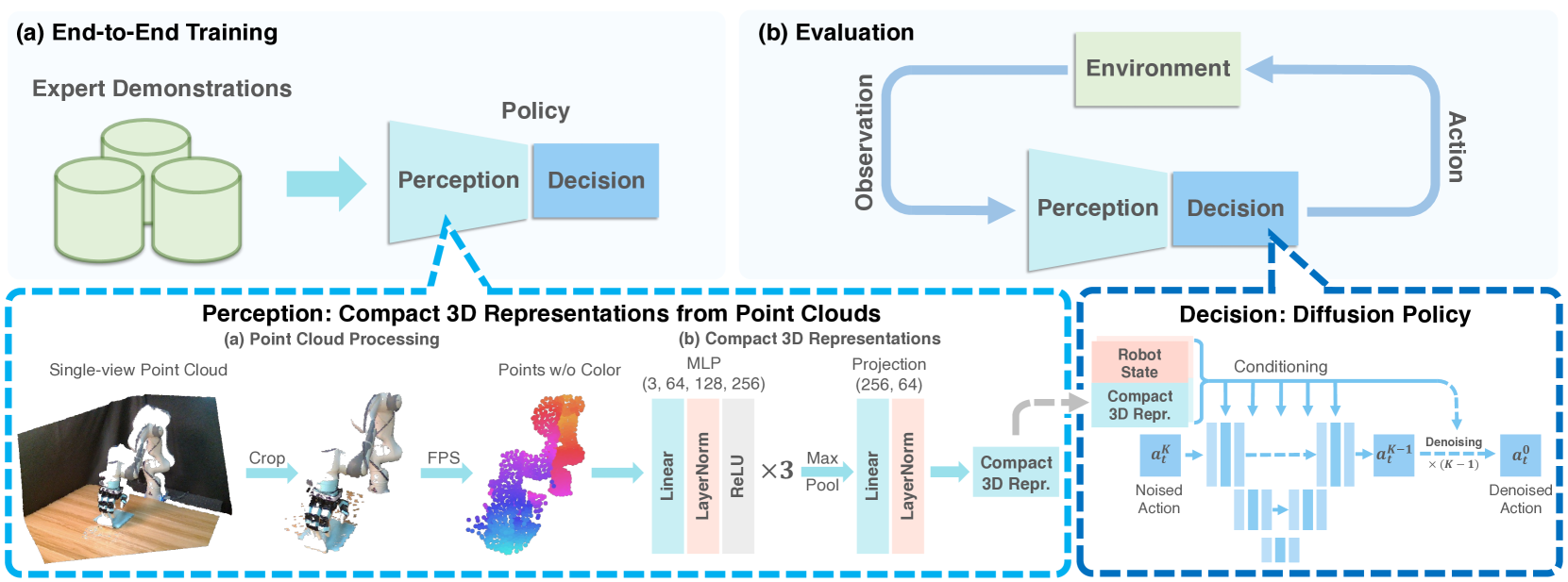
3D Diffusion Policy: Generalizable Visuomotor Policy Learning via Simple 3D Representations
Yanjie Ze, Gu Zhang, Kangning Zhang, Chenyuan Hu, Muhan Wang, Huazhe Xu
Imitation learning provides an efficient way to teach robots dexterous skills; however, learning complex skills robustly and generalizablely usually consumes large amounts of human demonstrations. To tackle this challenging problem, we present 3D Diffusion Policy (DP3), a novel visual imitation learning approach that incorporates the power of 3D visual representations into diffusion policies, a class of conditional action generative models. The core design of DP3 is the utilization of a compact 3D visual representation, extracted from sparse point clouds with an efficient point encoder. In our experiments involving 72 simulation tasks, DP3 successfully handles most tasks with just 10 demonstrations and surpasses baselines with a 24.2% relative improvement. In 4 real robot tasks, DP3 demonstrates precise control with a high success rate of 85%, given only 40 demonstrations of each task, and shows excellent generalization abilities in diverse aspects, including space, viewpoint, appearance, and instance. Interestingly, in real robot experiments, DP3 rarely violates safety requirements, in contrast to baseline methods which frequently do, necessitating human intervention. Our extensive evaluation highlights the critical importance of 3D representations in real-world robot learning. Videos, code, and data are available on https://3d-diffusion-policy.github.io .
Read more5/29/2024