MPCOM: Robotic Data Gathering with Radio Mapping and Model Predictive Communication

0

Sign in to get full access
Overview
- This paper presents MPCOM, a robotic data gathering system that combines radio mapping and model predictive communication.
- The system enables robots to navigate and gather data while maintaining reliable wireless communication links.
- Key innovations include a radio mapping module, a model predictive control framework, and a decentralized coordination algorithm.
Plain English Explanation
The paper describes a robotic system called MPCOM that helps robots gather data while staying connected. Robots need to be able to communicate wirelessly as they move around, but maintaining a strong signal can be challenging, especially in complex environments.
MPCOM: Robotic Data Gathering with Radio Mapping and Model Predictive Communication addresses this by giving the robots a few new capabilities. First, the robots can create a "map" of the wireless radio signals in the area, which helps them navigate to spots with the best connections.
Second, the robots use a technique called "model predictive control" to plan their movements. This allows them to anticipate how their actions will affect the wireless link and adjust their path accordingly. For example, they can choose routes that keep them in range of a strong signal.
Finally, the robots coordinate with each other in a decentralized way, so they can work together to maintain the communication network as they move around. This allows the system to scale up to multiple robots without a centralized point of failure.
Overall, MPCOM helps robots gather data effectively while staying connected, which could be useful for applications like search and rescue, environmental monitoring, or infrastructure inspection.
Technical Explanation
MPCOM: Robotic Data Gathering with Radio Mapping and Model Predictive Communication presents a system that enables a team of robots to gather data while maintaining reliable wireless communication links. The key components of the system are:
-
Radio Mapping Module: The robots collaboratively build a real-time map of the wireless signal strength in the environment. This allows them to plan paths that keep them connected.
-
Model Predictive Control (MPC) Framework: The robots use an MPC approach to plan their movements, taking into account the predicted effects on the wireless link quality. This allows them to proactively maintain connectivity.
-
Decentralized Coordination Algorithm: The robots coordinate their actions in a decentralized manner, without a central controller. This makes the system scalable and robust to individual robot failures.
The paper evaluates the system through simulation experiments and demonstrates its ability to outperform baseline approaches in terms of data gathering efficiency and communication link quality. The results showcase the benefits of integrating radio mapping, model predictive control, and decentralized coordination for robotic data collection tasks.
Critical Analysis
The paper presents a well-designed system that effectively addresses the challenge of maintaining wireless communication links during robotic data gathering missions. The incorporation of a radio mapping module, model predictive control, and decentralized coordination are all valuable innovations that contribute to the system's performance.
However, the paper does not discuss potential limitations or areas for further research in depth. For example, the simulation-based evaluation may not fully capture the complexities of real-world environments, and the scalability of the system to larger robot teams or more dynamic scenarios could be further explored.
Additionally, the paper does not touch on the computational and resource requirements of the system, which could be an important consideration for practical deployments, especially in resource-constrained environments. Multi-Robot Target Tracking with Sensing and Communication Constraints and Resource-Aware Collaborative Monte Carlo Localization with Communication Distri-bution are examples of papers that delve into such practical considerations.
Overall, the MPCOM system represents a promising approach to the problem of robotic data gathering with reliable communication, but further research and real-world validation would be valuable to fully assess its capabilities and limitations.
Conclusion
The MPCOM system described in this paper combines radio mapping, model predictive control, and decentralized coordination to enable a team of robots to gather data while maintaining reliable wireless communication links. By integrating these key innovations, the system addresses an important challenge in the field of robotics, where maintaining connectivity is crucial for effective data collection and mission execution.
The results presented in the paper demonstrate the potential of this approach, but further research is needed to fully explore its practical implications and scalability. Investigating the computational and resource requirements, as well as validating the system's performance in real-world scenarios, could provide valuable insights for future development and deployment of such robotic data gathering systems.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
MPCOM: Robotic Data Gathering with Radio Mapping and Model Predictive Communication
Zhiyou Ji, Guoliang Li, Ruihua Han, Shuai Wang, Bing Bai, Wei Xu, Kejiang Ye, Chengzhong Xu
Robotic data gathering (RDG) is an emerging paradigm that navigates a robot to harvest data from remote sensors. However, motion planning in this paradigm needs to maximize the RDG efficiency instead of the navigation efficiency, for which the existing motion planning methods become inefficient, as they plan robot trajectories merely according to motion factors. This paper proposes radio map guided model predictive communication (MPCOM), which navigates the robot with both grid and radio maps for shape-aware collision avoidance and communication-aware trajectory generation in a dynamic environment. The proposed MPCOM is able to trade off the time spent on reaching goal, avoiding collision, and improving communication. MPCOM captures high-order signal propagation characteristics using radio maps and incorporates the map-guided communication regularizer to the motion planning block. Experiments in IRSIM and CARLA simulators show that the proposed MPCOM outperforms other benchmarks in both LOS and NLOS cases. Real-world testing based on car-like robots is also provided to demonstrate the effectiveness of MPCOM in indoor environments.
Read more4/17/2024
0
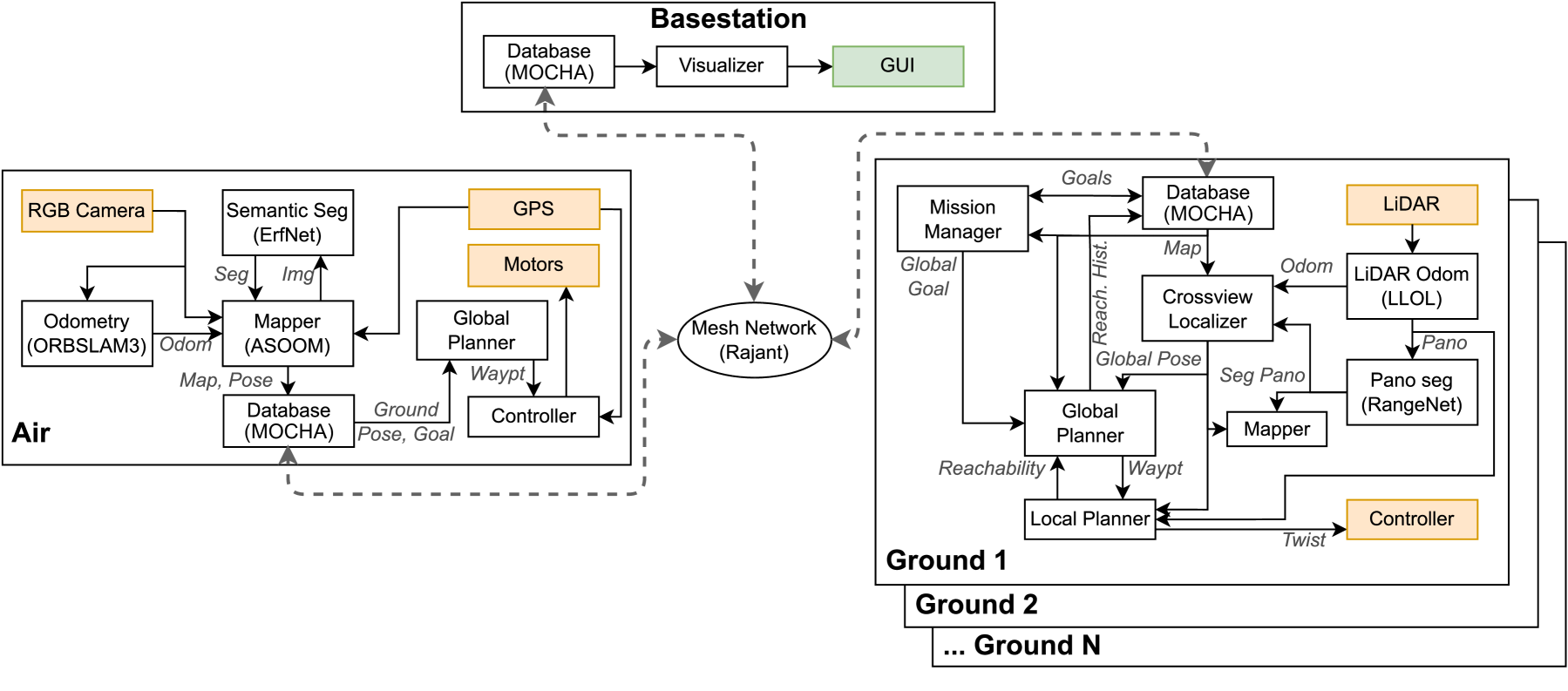
Air-Ground Collaboration with SPOMP: Semantic Panoramic Online Mapping and Planning
Ian D. Miller, Fernando Cladera, Trey Smith, Camillo Jose Taylor, Vijay Kumar
Mapping and navigation have gone hand-in-hand since long before robots existed. Maps are a key form of communication, allowing someone who has never been somewhere to nonetheless navigate that area successfully. In the context of multi-robot systems, the maps and information that flow between robots are necessary for effective collaboration, whether those robots are operating concurrently, sequentially, or completely asynchronously. In this paper, we argue that maps must go beyond encoding purely geometric or visual information to enable increasingly complex autonomy, particularly between robots. We propose a framework for multi-robot autonomy, focusing in particular on air and ground robots operating in outdoor 2.5D environments. We show that semantic maps can enable the specification, planning, and execution of complex collaborative missions, including localization in GPS-denied settings. A distinguishing characteristic of this work is that we strongly emphasize field experiments and testing, and by doing so demonstrate that these ideas can work at scale in the real world. We also perform extensive simulation experiments to validate our ideas at even larger scales. We believe these experiments and the experimental results constitute a significant step forward toward advancing the state-of-the-art of large-scale, collaborative multi-robot systems operating with real communication, navigation, and perception constraints.
Read more7/16/2024
🔍
0
A Distributed Multi-Robot Coordination Algorithm for Navigation in Tight Environments
Roya Firoozi, Laura Ferranti, Xiaojing Zhang, Sebastian Nejadnik, Francesco Borrelli
This work presents a distributed method for multi-vehicle coordination based on nonlinear model predictive control (NMPC) and dual decomposition. Our approach allows the vehicles to coordinate in tight spaces (e.g., busy highway lanes or parking lots) by using a polytopic description of each vehicle's shape and formulating collision avoidance as a dual optimization problem. Our method accommodates heterogeneous teams of vehicles (i.e., vehicles with different polytopic shapes and dynamic models can be part of the same team). Our method allows the vehicles to share their intentions in a distributed fashion without relying on a central coordinator and efficiently provides collision-free trajectories for the vehicles. In addition, our method decouples the individual-vehicles' trajectory optimization from their collision-avoidance objectives enhancing the scalability of the method and allowing one to exploit parallel hardware architectures. All these features are particularly important for vehicular applications, where the systems operate at high-frequency rates in dynamic environments. To validate our method, we apply it in a vehicular application, that is, the autonomous lane-merging of a team of connected vehicles to form a platoon. We compare our design with the centralized NMPC design to show the computational benefits of the proposed distributed algorithm.
Read more6/11/2024

0
RoboMP$^2$: A Robotic Multimodal Perception-Planning Framework with Multimodal Large Language Models
Qi Lv, Hao Li, Xiang Deng, Rui Shao, Michael Yu Wang, Liqiang Nie
Multimodal Large Language Models (MLLMs) have shown impressive reasoning abilities and general intelligence in various domains. It inspires researchers to train end-to-end MLLMs or utilize large models to generate policies with human-selected prompts for embodied agents. However, these methods exhibit limited generalization capabilities on unseen tasks or scenarios, and overlook the multimodal environment information which is critical for robots to make decisions. In this paper, we introduce a novel Robotic Multimodal Perception-Planning (RoboMP$^2$) framework for robotic manipulation which consists of a Goal-Conditioned Multimodal Preceptor (GCMP) and a Retrieval-Augmented Multimodal Planner (RAMP). Specially, GCMP captures environment states by employing a tailored MLLMs for embodied agents with the abilities of semantic reasoning and localization. RAMP utilizes coarse-to-fine retrieval method to find the $k$ most-relevant policies as in-context demonstrations to enhance the planner. Extensive experiments demonstrate the superiority of RoboMP$^2$ on both VIMA benchmark and real-world tasks, with around 10% improvement over the baselines.
Read more6/11/2024