Air-Ground Collaboration with SPOMP: Semantic Panoramic Online Mapping and Planning

0
Sign in to get full access
Overview
- Presents a collaborative mapping and planning system called SPOMP (Semantic Panoramic Online Mapping and Planning) for air-ground robot teams
- Leverages semantic understanding and panoramic mapping to enable efficient exploration and goal-oriented navigation
- Allows robots to share semantic knowledge and coordinate their actions for improved collaborative mapping and planning
Plain English Explanation
SPOMP is a system that helps air and ground robots work together more effectively. It allows the robots to build a shared understanding of their environment by creating detailed 360-degree maps with semantic information about the objects and places they see. This enables the robots to navigate more efficiently and coordinate their actions to complete tasks.
The key idea is that by sharing their panoramic maps and semantic knowledge, the robots can develop a better overall picture of their surroundings. This allows them to plan routes, identify goals, and divide up responsibilities in a more intelligent way. For example, an aerial robot might detect an interesting landmark and relay that information to a ground robot, which could then navigate directly to that location.
The semantic mapping capabilities and collaborative planning aspects of SPOMP build on previous research in areas like large-scale exploration, interoperable mapping, and lightweight collaboration. By integrating these capabilities, SPOMP aims to enable more efficient, flexible, and intelligent coordination between air and ground robots.
Technical Explanation
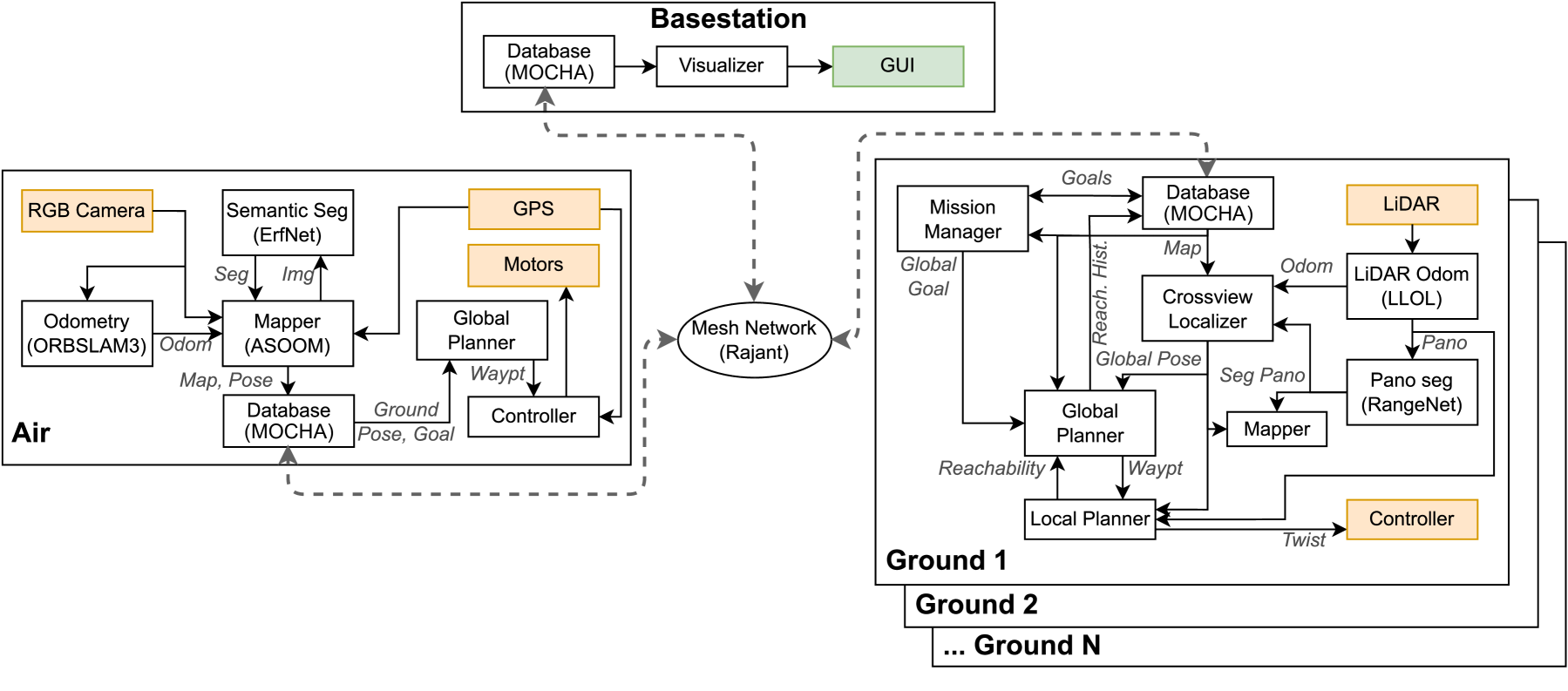
The SPOMP system consists of several key components:
-
Panoramic Mapping: Each robot constructs a 360-degree map of its environment using visual sensors and simultaneous localization and mapping (SLAM) techniques. This provides a comprehensive view of the surroundings.
-
Semantic Understanding: The robots use deep learning models to detect and classify semantic elements in their panoramic maps, such as objects, surfaces, and spatial relationships. This adds high-level contextual information to the maps.
-
Collaborative Mapping: The robots share their panoramic maps and semantic knowledge with each other, allowing them to build a unified representation of the environment. This shared understanding guides their subsequent planning and coordination.
-
Goal-Oriented Planning: Based on the collaborative map, the robots can identify relevant goals and plan efficient paths to reach them. They can also dynamically update their plans as new information becomes available through the shared mapping process.
The researchers evaluated SPOMP in both simulation and real-world experiments, demonstrating its ability to enable effective air-ground collaboration for tasks like exploration, search and rescue, and environmental monitoring. The results showed significant improvements in mapping coverage, navigation efficiency, and task completion compared to non-collaborative approaches.
Critical Analysis
The SPOMP system represents a promising step forward in air-ground robot collaboration, leveraging semantic understanding and panoramic mapping to enhance coordination and task performance. However, the paper does acknowledge some limitations and areas for future work:
-
Scalability: The current implementation may face challenges scaling to larger teams or more complex environments, as the overhead of maintaining the shared map and coordinating actions could become prohibitive. Techniques for lightweight collaboration may help address this.
-
Robustness: The system's reliance on accurate semantic understanding and reliable communication between robots could make it vulnerable to errors or failures in these components. Incorporating more robust mapping and planning strategies may be necessary.
-
Dynamic Environments: The current system primarily focuses on static environments, but many real-world scenarios involve dynamic elements like moving obstacles or changing conditions. Extending SPOMP to handle such challenges in large-scale exploration would be an important next step.
Overall, the SPOMP system demonstrates the potential of leveraging semantic understanding and panoramic mapping to enable more effective air-ground collaboration. As the researchers continue to address the identified limitations, their work could have significant implications for a wide range of robotic applications.
Conclusion
The SPOMP system presented in this paper represents an important advancement in air-ground robot collaboration. By combining panoramic mapping, semantic understanding, and goal-oriented planning, it allows robot teams to build a shared, comprehensive representation of their environment and coordinate their actions more effectively.
The key innovation of SPOMP is its ability to leverage semantic knowledge to guide the collaborative mapping and planning process. This enables the robots to navigate more efficiently, identify relevant goals, and divide up responsibilities in a way that optimizes overall task performance.
As the researchers continue to refine and expand the SPOMP system, it could have widespread applications in areas like search and rescue, environmental monitoring, and disaster response, where air-ground robot teams can work together to cover large areas and respond to dynamic situations. The integration of semantic mapping, collaborative planning, and large-scale exploration capabilities represents a significant step forward in the field of multi-robot coordination and autonomy.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Air-Ground Collaboration with SPOMP: Semantic Panoramic Online Mapping and Planning
Ian D. Miller, Fernando Cladera, Trey Smith, Camillo Jose Taylor, Vijay Kumar
Mapping and navigation have gone hand-in-hand since long before robots existed. Maps are a key form of communication, allowing someone who has never been somewhere to nonetheless navigate that area successfully. In the context of multi-robot systems, the maps and information that flow between robots are necessary for effective collaboration, whether those robots are operating concurrently, sequentially, or completely asynchronously. In this paper, we argue that maps must go beyond encoding purely geometric or visual information to enable increasingly complex autonomy, particularly between robots. We propose a framework for multi-robot autonomy, focusing in particular on air and ground robots operating in outdoor 2.5D environments. We show that semantic maps can enable the specification, planning, and execution of complex collaborative missions, including localization in GPS-denied settings. A distinguishing characteristic of this work is that we strongly emphasize field experiments and testing, and by doing so demonstrate that these ideas can work at scale in the real world. We also perform extensive simulation experiments to validate our ideas at even larger scales. We believe these experiments and the experimental results constitute a significant step forward toward advancing the state-of-the-art of large-scale, collaborative multi-robot systems operating with real communication, navigation, and perception constraints.
Read more7/16/2024

0
Challenges and Opportunities for Large-Scale Exploration with Air-Ground Teams using Semantics
Fernando Cladera, Ian D. Miller, Zachary Ravichandran, Varun Murali, Jason Hughes, M. Ani Hsieh, C. J. Taylor, Vijay Kumar
One common and desirable application of robots is exploring potentially hazardous and unstructured environments. Air-ground collaboration offers a synergistic approach to addressing such exploration challenges. In this paper, we demonstrate a system for large-scale exploration using a team of aerial and ground robots. Our system uses semantics as lingua franca, and relies on fully opportunistic communications. We highlight the unique challenges from this approach, explain our system architecture and showcase lessons learned during our experiments. All our code is open-source, encouraging researchers to use it and build upon.
Read more5/14/2024

0
Unified Map Handling for Robotic Systems: Enhancing Interoperability and Efficiency Across Diverse Environments
James R. Heselden, Gautham P. Das
Mapping is a time-consuming process for deploying robotic systems to new environments. The handling of maps is also risk-adverse when not managed effectively. We propose here, a standardised approach to handling such maps in a manner which focuses on the information contained wherein such as global location, object positions, topology, and occupancy. As part of this approach, associated management scripts are able to assist with generation of maps both through direct and indirect information restructuring, and with template and procedural generation of missing data. These approaches are able to, when combined, improve the handling of maps to enable more efficient deployments and higher interoperability between platforms. Alongside this, a collection of sample datasets of fully-mapped environments are included covering areas such as agriculture, urban roadways, and indoor environments.
Read more4/23/2024
0
Mapping High-level Semantic Regions in Indoor Environments without Object Recognition
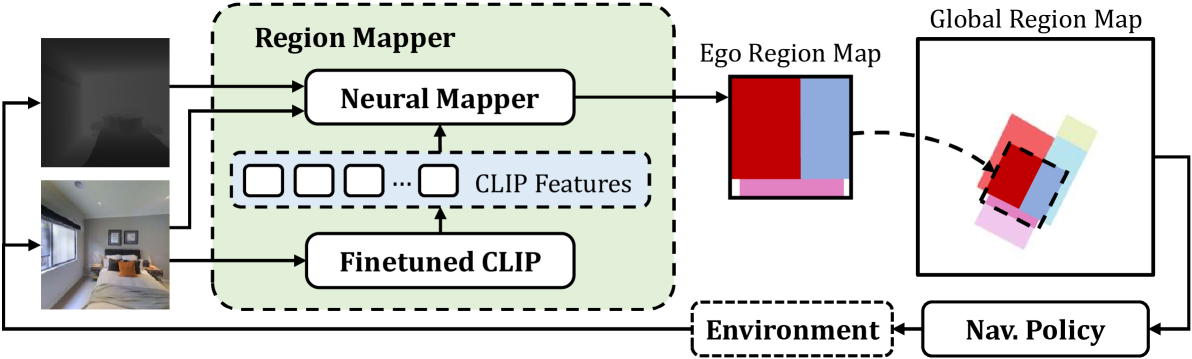
Roberto Bigazzi, Lorenzo Baraldi, Shreyas Kousik, Rita Cucchiara, Marco Pavone
Robots require a semantic understanding of their surroundings to operate in an efficient and explainable way in human environments. In the literature, there has been an extensive focus on object labeling and exhaustive scene graph generation; less effort has been focused on the task of purely identifying and mapping large semantic regions. The present work proposes a method for semantic region mapping via embodied navigation in indoor environments, generating a high-level representation of the knowledge of the agent. To enable region identification, the method uses a vision-to-language model to provide scene information for mapping. By projecting egocentric scene understanding into the global frame, the proposed method generates a semantic map as a distribution over possible region labels at each location. This mapping procedure is paired with a trained navigation policy to enable autonomous map generation. The proposed method significantly outperforms a variety of baselines, including an object-based system and a pretrained scene classifier, in experiments in a photorealistic simulator.
Read more4/16/2024