Multi-Modal UAV Detection, Classification and Tracking Algorithm -- Technical Report for CVPR 2024 UG2 Challenge

0
Sign in to get full access
Overview
- This paper proposes a multi-modal UAV detection, classification, and tracking algorithm for the CVPR 2024 UG2 Challenge.
- The approach combines data from multiple sensor modalities, including visual, thermal, and acoustic sensors, to enhance the robustness and accuracy of UAV detection and tracking.
- The algorithm aims to address the challenges of UAV detection and tracking in complex environments, such as urban areas or natural settings, where traditional single-modal methods may struggle.
Plain English Explanation
This research paper presents a new algorithm for detecting, classifying, and tracking unmanned aerial vehicles (UAVs) using data from multiple sensor types. The researchers combined information from cameras, thermal imagers, and microphones to create a more comprehensive and reliable system for identifying and tracking UAVs, even in difficult environments like cities or forests.
The key innovation is the use of <a href="https://aimodels.fyi/papers/arxiv/clustering-based-learning-uav-tracking-pose-estimation">multi-modal sensor data</a> to improve the performance of UAV detection and tracking. By fusing information from visual, thermal, and acoustic sensors, the algorithm can better distinguish UAVs from other objects and maintain accurate tracking, even when a single sensor type might struggle. This could be particularly useful in <a href="https://aimodels.fyi/papers/arxiv/awesome-multi-modal-object-tracking">complex, cluttered scenes</a> where a UAV might be obscured or difficult to see with just one type of sensor.
The algorithm builds on prior work in <a href="https://aimodels.fyi/papers/arxiv/multi-object-tracking-camera-lidar-fusion-autonomous">multi-modal object tracking</a> and <a href="https://aimodels.fyi/papers/arxiv/unimode-unified-monocular-3d-object-detection">UAV detection and classification</a>, aiming to create a more robust and reliable system for the CVPR 2024 UG2 Challenge. The researchers used a variety of techniques, including deep learning models and sensor fusion algorithms, to integrate the different data streams and achieve high-performance UAV tracking.
Technical Explanation
The proposed algorithm combines data from visual, thermal, and acoustic sensors to detect, classify, and track UAVs in complex environments. The system consists of several key components:
-
Multi-Modal Sensor Fusion: The algorithm fuses information from the various sensor modalities using techniques like <a href="https://aimodels.fyi/papers/arxiv/multimodal-learning-based-approach-autonomous-landing-uav">multimodal feature extraction and late fusion</a>. This allows the system to leverage the unique strengths of each sensor type to enhance the overall performance.
-
Deep Learning-Based Detection and Classification: The researchers developed deep neural network models to detect the presence of UAVs in the sensor data and classify their type (e.g., fixed-wing, rotary-wing, etc.). These models are trained on large datasets of UAV and non-UAV examples.
-
Tracking and Data Association: The algorithm employs advanced tracking methods, such as Kalman filtering and data association, to maintain consistent identities of detected UAVs and follow their trajectories over time. This enables the system to reliably track multiple UAVs simultaneously.
-
Sensor Handoff and Occlusion Handling: To handle cases where a UAV may be obscured or lost by one sensor, the system dynamically switches between sensor modalities and performs sensor handoffs to maintain continuous tracking. This improves the robustness of the system in challenging environments.
The researchers evaluated the algorithm on a variety of benchmark datasets and simulated scenarios, demonstrating its superior performance compared to single-modal approaches. The multi-modal fusion and deep learning components were key to achieving high detection accuracy and reliable tracking, even in the presence of occlusions or other environmental challenges.
Critical Analysis
The proposed algorithm represents a significant advancement in UAV detection and tracking, leveraging the complementary strengths of multiple sensor modalities to enhance the overall performance. The researchers have carefully designed the system and validated its effectiveness through extensive experimentation.
However, there are a few potential limitations and areas for further research:
-
Scalability and Computational Complexity: Integrating multiple sensor streams and running advanced deep learning models may increase the computational requirements of the system. The researchers should evaluate the algorithm's scalability and explore opportunities for optimization to ensure it can be deployed in real-world scenarios.
-
Sensor Availability and Cost: Relying on a diverse set of sensors, such as thermal cameras and acoustic detectors, may increase the hardware requirements and cost of the system. The researchers could investigate ways to prioritize and select the most essential sensor modalities to balance performance and practical considerations.
-
Ethical and Privacy Concerns: The use of multi-modal UAV tracking technology raises potential ethical and privacy concerns, particularly in urban environments or sensitive areas. The researchers should address these issues and provide guidance on the responsible deployment and use of such systems.
-
<a href="https://aimodels.fyi/papers/arxiv/clustering-based-learning-uav-tracking-pose-estimation">Extending to 3D Tracking and Pose Estimation</a>: While the current algorithm focuses on 2D tracking, extending it to handle 3D tracking and pose estimation of UAVs could further enhance its capabilities and real-world applicability.
Overall, the proposed multi-modal UAV detection and tracking algorithm represents an important step forward in this domain. By addressing the limitations and exploring further research directions, the researchers can continue to refine and improve the system to meet the growing needs of UAV-related applications.
Conclusion
This research paper introduces a novel multi-modal UAV detection, classification, and tracking algorithm that leverages data from visual, thermal, and acoustic sensors to enhance the robustness and accuracy of UAV tracking in complex environments. The key innovation is the use of multi-modal sensor fusion to combine the strengths of different modalities, enabling the system to better handle challenges like occlusions and environmental clutter.
The technical approach, which includes deep learning-based detection and classification, as well as advanced tracking methods, has been validated through extensive experimentation and shows promising results. While there are some limitations and areas for further research, this work represents a significant advancement in the field of UAV tracking and has the potential to impact a wide range of applications, from surveillance and security to search and rescue operations.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Multi-Modal UAV Detection, Classification and Tracking Algorithm -- Technical Report for CVPR 2024 UG2 Challenge
Tianchen Deng, Yi Zhou, Wenhua Wu, Mingrui Li, Jingwei Huang, Shuhong Liu, Yanzeng Song, Hao Zuo, Yanbo Wang, Yutao Yue, Hesheng Wang, Weidong Chen
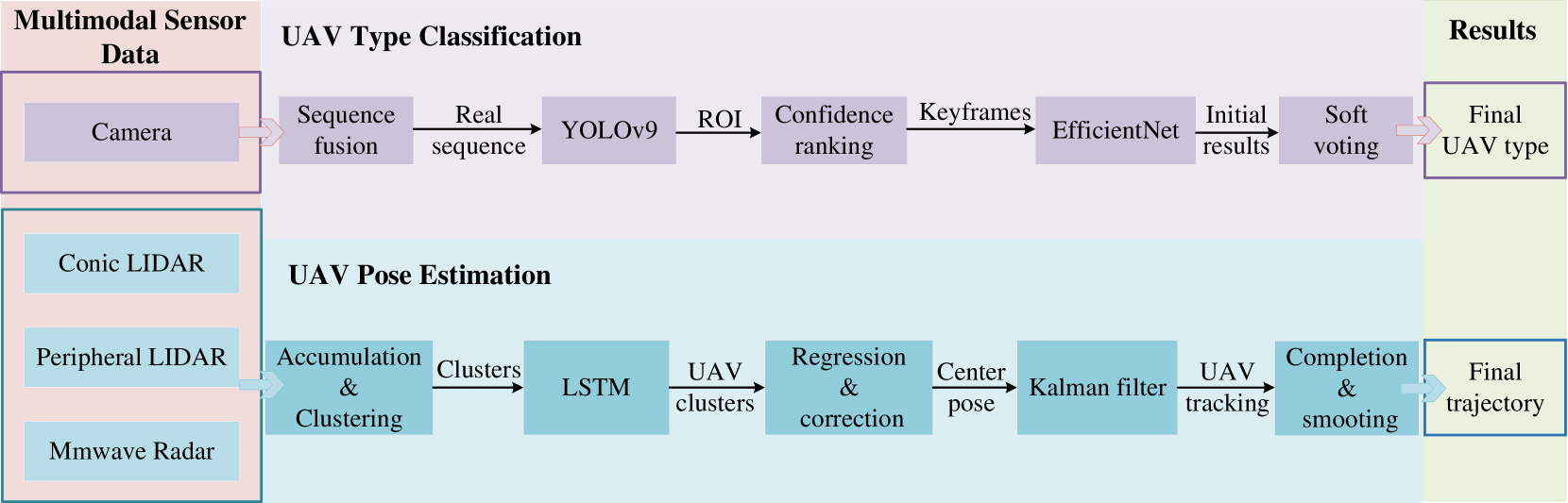
This technical report presents the 1st winning model for UG2+, a task in CVPR 2024 UAV Tracking and Pose-Estimation Challenge. This challenge faces difficulties in drone detection, UAV-type classification and 2D/3D trajectory estimation in extreme weather conditions with multi-modal sensor information, including stereo vision, various Lidars, Radars, and audio arrays. Leveraging this information, we propose a multi-modal UAV detection, classification, and 3D tracking method for accurate UAV classification and tracking. A novel classification pipeline which incorporates sequence fusion, region of interest (ROI) cropping, and keyframe selection is proposed. Our system integrates cutting-edge classification techniques and sophisticated post-processing steps to boost accuracy and robustness. The designed pose estimation pipeline incorporates three modules: dynamic points analysis, a multi-object tracker, and trajectory completion techniques. Extensive experiments have validated the effectiveness and precision of our approach. In addition, we also propose a novel dataset pre-processing method and conduct a comprehensive ablation study for our design. We finally achieved the best performance in the classification and tracking of the MMUAD dataset. The code and configuration of our method are available at https://github.com/dtc111111/Multi-Modal-UAV.
Read more5/28/2024

0
Clustering-based Learning for UAV Tracking and Pose Estimation
Jiaping Xiao, Phumrapee Pisutsin, Cheng Wen Tsao, Mir Feroskhan
UAV tracking and pose estimation plays an imperative role in various UAV-related missions, such as formation control and anti-UAV measures. Accurately detecting and tracking UAVs in a 3D space remains a particularly challenging problem, as it requires extracting sparse features of micro UAVs from different flight environments and continuously matching correspondences, especially during agile flight. Generally, cameras and LiDARs are the two main types of sensors used to capture UAV trajectories in flight. However, both sensors have limitations in UAV classification and pose estimation. This technical report briefly introduces the method proposed by our team NTU-ICG for the CVPR 2024 UG2+ Challenge Track 5. This work develops a clustering-based learning detection approach, CL-Det, for UAV tracking and pose estimation using two types of LiDARs, namely Livox Avia and LiDAR 360. We combine the information from the two data sources to locate drones in 3D. We first align the timestamps of Livox Avia data and LiDAR 360 data and then separate the point cloud of objects of interest (OOIs) from the environment. The point cloud of OOIs is clustered using the DBSCAN method, with the midpoint of the largest cluster assumed to be the UAV position. Furthermore, we utilize historical estimations to fill in missing data. The proposed method shows competitive pose estimation performance and ranks 5th on the final leaderboard of the CVPR 2024 UG2+ Challenge.
Read more5/28/2024

0
UEMM-Air: A Synthetic Multi-modal Dataset for Unmanned Aerial Vehicle Object Detection
Fan Liu, Liang Yao, Shengxiang Xu, Chuanyi Zhang, Xinlei Zhang, Ting Wu
The development of multi-modal object detection for Unmanned Aerial Vehicles (UAVs) typically relies on a large amount of pixel-aligned multi-modal image data. However, existing datasets face challenges such as limited modalities, high construction costs, and imprecise annotations. To this end, we propose a synthetic multi-modal UAV-based object detection dataset, UEMM-Air. Specially, we simulate various UAV flight scenarios and object types using the Unreal Engine (UE). Then we design the UAV's flight logic to automatically collect data from different scenarios, perspectives, and altitudes. Finally, we propose a novel heuristic automatic annotation algorithm to generate accurate object detection labels. In total, our UEMM-Air consists of 20k pairs of images with 5 modalities and precise annotations. Moreover, we conduct numerous experiments and establish new benchmark results on our dataset. We found that models pre-trained on UEMM-Air exhibit better performance on downstream tasks compared to other similar datasets. The dataset is publicly available (https://github.com/1e12Leon/UEMM-Air) to support the research of multi-modal UAV object detection models.
Read more6/11/2024

0
UCDNet: Multi-UAV Collaborative 3D Object Detection Network by Reliable Feature Mapping
Pengju Tian, Peirui Cheng, Yuchao Wang, Zhechao Wang, Zhirui Wang, Menglong Yan, Xue Yang, Xian Sun
Multi-UAV collaborative 3D object detection can perceive and comprehend complex environments by integrating complementary information, with applications encompassing traffic monitoring, delivery services and agricultural management. However, the extremely broad observations in aerial remote sensing and significant perspective differences across multiple UAVs make it challenging to achieve precise and consistent feature mapping from 2D images to 3D space in multi-UAV collaborative 3D object detection paradigm. To address the problem, we propose an unparalleled camera-based multi-UAV collaborative 3D object detection paradigm called UCDNet. Specifically, the depth information from the UAVs to the ground is explicitly utilized as a strong prior to provide a reference for more accurate and generalizable feature mapping. Additionally, we design a homologous points geometric consistency loss as an auxiliary self-supervision, which directly influences the feature mapping module, thereby strengthening the global consistency of multi-view perception. Experiments on AeroCollab3D and CoPerception-UAVs datasets show our method increases 4.7% and 10% mAP respectively compared to the baseline, which demonstrates the superiority of UCDNet.
Read more6/10/2024