UEMM-Air: A Synthetic Multi-modal Dataset for Unmanned Aerial Vehicle Object Detection

0

Sign in to get full access
Overview
- This paper presents UEMM-Air, a synthetic multi-modal dataset for object detection and tracking in unmanned aerial vehicle (UAV) imagery.
- The dataset includes high-resolution RGB images, depth maps, and thermal infrared (IR) images, along with annotated object bounding boxes and instance segmentation masks.
- The authors also propose a novel multi-modal fusion algorithm for object detection and tracking, which leverages the complementary information from the different sensor modalities.
Plain English Explanation
The researchers have created a new dataset called UEMM-Air, which is a collection of synthetic images and data captured from a UAV (drone). These images include not just regular color (RGB) photos, but also depth information and thermal infrared (heat) images. Along with the images, the dataset also provides annotations that identify and outline the locations of different objects in the scenes.
The researchers then developed a new algorithm that can take advantage of all this multi-modal data to detect and track objects more accurately than using just a single type of sensor data. The idea is that combining information from different types of sensors (color, depth, heat) can provide a more complete and reliable picture of what's happening in the drone's surroundings.
This could be useful for a variety of applications involving UAVs, such as security, search and rescue, or environmental monitoring. By having a rich dataset and a robust multi-modal fusion algorithm, researchers and developers can improve the computer vision and object tracking capabilities of drones, making them more effective tools for these types of real-world tasks.
Technical Explanation
The UEMM-Air dataset consists of synthetic RGB, depth, and thermal infrared (IR) images captured from a simulated UAV. The dataset includes over 100,000 annotated images with bounding boxes and instance segmentation masks for a variety of objects, including vehicles, pedestrians, and buildings.
To leverage the multi-modal nature of the data, the authors propose a novel multi-modal fusion algorithm for object detection and tracking. The algorithm uses a shared backbone network to extract features from the RGB, depth, and thermal IR inputs, and then fuses these features at multiple scales using an attention-based mechanism. This allows the model to adaptively combine the complementary information from the different sensor modalities to improve object detection and tracking performance.
The authors evaluate their approach on the UEMM-Air dataset and other multi-modal UAV datasets, demonstrating state-of-the-art results for object detection, instance segmentation, and 3D object tracking. They also show that their multi-modal fusion algorithm outperforms approaches that only use a single sensor modality.
Critical Analysis
One potential limitation of the UEMM-Air dataset is that it is a synthetic dataset, generated using a 3D rendering engine. While the authors argue that this allows for precise control over the data generation process and enables the collection of large-scale, diverse datasets, there is a risk that the synthetic data may not fully capture the complexity and variability of real-world UAV imagery. Further validation on real-world datasets would be necessary to ensure the generalization of the proposed multi-modal fusion algorithm.
Additionally, the paper does not provide a detailed analysis of the computational and memory requirements of the proposed multi-modal fusion algorithm. As UAV systems often have limited on-board processing capabilities, the efficiency and deployability of the algorithm on embedded platforms should be considered.
Finally, while the authors demonstrate the effectiveness of their approach on object detection and tracking tasks, the potential applications and impact of this technology on real-world UAV-based systems, such as security, search and rescue, or environmental monitoring, are not explored in depth. Further research and discussion on the practical implications and societal impact of this work would be valuable.
Conclusion
In this paper, the authors present UEMM-Air, a large-scale synthetic multi-modal dataset for UAV object detection and tracking, and a novel multi-modal fusion algorithm that leverages the complementary information from RGB, depth, and thermal IR sensors. The proposed approach demonstrates state-of-the-art performance on the UEMM-Air dataset and other multi-modal UAV benchmarks, highlighting the potential of multi-modal perception for improving the capabilities of UAV-based systems.
While the synthetic nature of the dataset and the computational efficiency of the algorithm warrant further investigation, this work represents an important contribution to the field of multi-modal computer vision for UAVs, with promising applications in areas such as security, search and rescue, and environmental monitoring. As UAV technology continues to advance, the ability to accurately perceive and understand the surrounding environment using multiple sensor modalities will be crucial for unlocking the full potential of these versatile aerial platforms.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
UEMM-Air: A Synthetic Multi-modal Dataset for Unmanned Aerial Vehicle Object Detection
Fan Liu, Liang Yao, Shengxiang Xu, Chuanyi Zhang, Xinlei Zhang, Ting Wu
The development of multi-modal object detection for Unmanned Aerial Vehicles (UAVs) typically relies on a large amount of pixel-aligned multi-modal image data. However, existing datasets face challenges such as limited modalities, high construction costs, and imprecise annotations. To this end, we propose a synthetic multi-modal UAV-based object detection dataset, UEMM-Air. Specially, we simulate various UAV flight scenarios and object types using the Unreal Engine (UE). Then we design the UAV's flight logic to automatically collect data from different scenarios, perspectives, and altitudes. Finally, we propose a novel heuristic automatic annotation algorithm to generate accurate object detection labels. In total, our UEMM-Air consists of 20k pairs of images with 5 modalities and precise annotations. Moreover, we conduct numerous experiments and establish new benchmark results on our dataset. We found that models pre-trained on UEMM-Air exhibit better performance on downstream tasks compared to other similar datasets. The dataset is publicly available (https://github.com/1e12Leon/UEMM-Air) to support the research of multi-modal UAV object detection models.
Read more6/11/2024
0
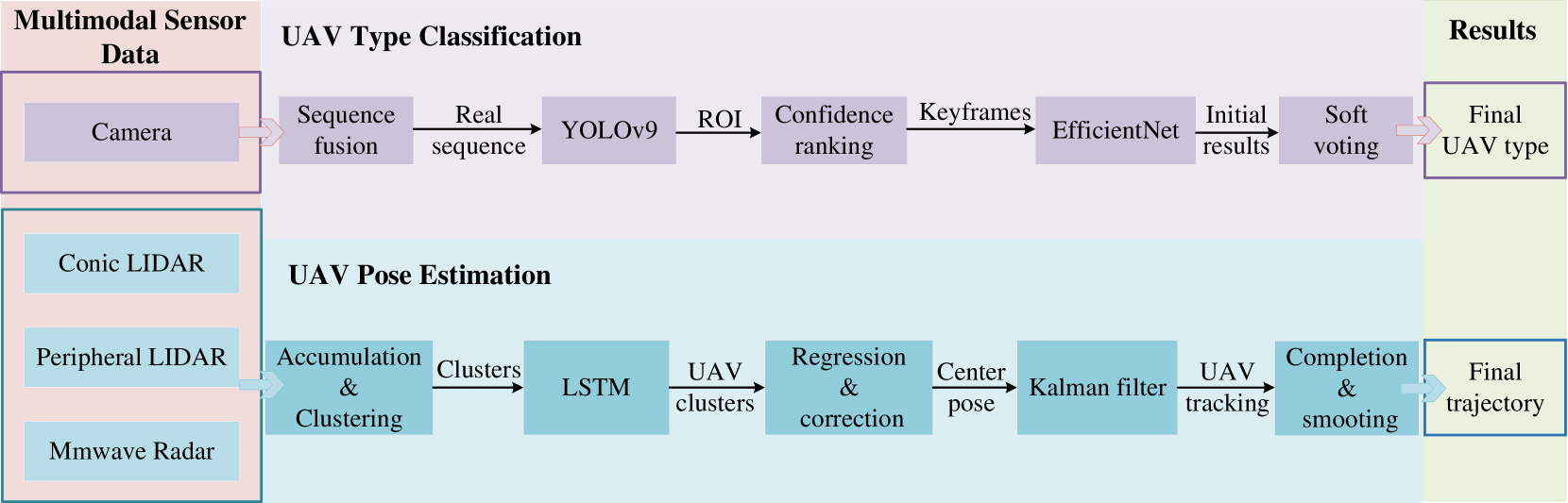
Multi-Modal UAV Detection, Classification and Tracking Algorithm -- Technical Report for CVPR 2024 UG2 Challenge
Tianchen Deng, Yi Zhou, Wenhua Wu, Mingrui Li, Jingwei Huang, Shuhong Liu, Yanzeng Song, Hao Zuo, Yanbo Wang, Yutao Yue, Hesheng Wang, Weidong Chen
This technical report presents the 1st winning model for UG2+, a task in CVPR 2024 UAV Tracking and Pose-Estimation Challenge. This challenge faces difficulties in drone detection, UAV-type classification and 2D/3D trajectory estimation in extreme weather conditions with multi-modal sensor information, including stereo vision, various Lidars, Radars, and audio arrays. Leveraging this information, we propose a multi-modal UAV detection, classification, and 3D tracking method for accurate UAV classification and tracking. A novel classification pipeline which incorporates sequence fusion, region of interest (ROI) cropping, and keyframe selection is proposed. Our system integrates cutting-edge classification techniques and sophisticated post-processing steps to boost accuracy and robustness. The designed pose estimation pipeline incorporates three modules: dynamic points analysis, a multi-object tracker, and trajectory completion techniques. Extensive experiments have validated the effectiveness and precision of our approach. In addition, we also propose a novel dataset pre-processing method and conduct a comprehensive ablation study for our design. We finally achieved the best performance in the classification and tracking of the MMUAD dataset. The code and configuration of our method are available at https://github.com/dtc111111/Multi-Modal-UAV.
Read more5/28/2024

0
UAV (Unmanned Aerial Vehicles): Diverse Applications of UAV Datasets in Segmentation, Classification, Detection, and Tracking
Md. Mahfuzur Rahman, Sunzida Siddique, Marufa Kamal, Rakib Hossain Rifat, Kishor Datta Gupta
Unmanned Aerial Vehicles (UAVs), have greatly revolutionized the process of gathering and analyzing data in diverse research domains, providing unmatched adaptability and effectiveness. This paper presents a thorough examination of Unmanned Aerial Vehicle (UAV) datasets, emphasizing their wide range of applications and progress. UAV datasets consist of various types of data, such as satellite imagery, images captured by drones, and videos. These datasets can be categorized as either unimodal or multimodal, offering a wide range of detailed and comprehensive information. These datasets play a crucial role in disaster damage assessment, aerial surveillance, object recognition, and tracking. They facilitate the development of sophisticated models for tasks like semantic segmentation, pose estimation, vehicle re-identification, and gesture recognition. By leveraging UAV datasets, researchers can significantly enhance the capabilities of computer vision models, thereby advancing technology and improving our understanding of complex, dynamic environments from an aerial perspective. This review aims to encapsulate the multifaceted utility of UAV datasets, emphasizing their pivotal role in driving innovation and practical applications in multiple domains.
Read more9/6/2024
🔍
0
UniM$^2$AE: Multi-modal Masked Autoencoders with Unified 3D Representation for 3D Perception in Autonomous Driving
Jian Zou, Tianyu Huang, Guanglei Yang, Zhenhua Guo, Tao Luo, Chun-Mei Feng, Wangmeng Zuo
Masked Autoencoders (MAE) play a pivotal role in learning potent representations, delivering outstanding results across various 3D perception tasks essential for autonomous driving. In real-world driving scenarios, it's commonplace to deploy multiple sensors for comprehensive environment perception. Despite integrating multi-modal features from these sensors can produce rich and powerful features, there is a noticeable challenge in MAE methods addressing this integration due to the substantial disparity between the different modalities. This research delves into multi-modal Masked Autoencoders tailored for a unified representation space in autonomous driving, aiming to pioneer a more efficient fusion of two distinct modalities. To intricately marry the semantics inherent in images with the geometric intricacies of LiDAR point clouds, we propose UniM$^2$AE. This model stands as a potent yet straightforward, multi-modal self-supervised pre-training framework, mainly consisting of two designs. First, it projects the features from both modalities into a cohesive 3D volume space to intricately marry the bird's eye view (BEV) with the height dimension. The extension allows for a precise representation of objects and reduces information loss when aligning multi-modal features. Second, the Multi-modal 3D Interactive Module (MMIM) is invoked to facilitate the efficient inter-modal interaction during the interaction process. Extensive experiments conducted on the nuScenes Dataset attest to the efficacy of UniM$^2$AE, indicating enhancements in 3D object detection and BEV map segmentation by 1.2% NDS and 6.5% mIoU, respectively. The code is available at https://github.com/hollow-503/UniM2AE.
Read more8/26/2024