Navigation and 3D Surface Reconstruction from Passive Whisker Sensing

0

Sign in to get full access
Overview
- This paper presents a novel approach for navigation and 3D surface reconstruction using passive whisker sensing.
- The system leverages the tactile information obtained from whisker-like sensors to navigate complex environments and build detailed 3D models of the surrounding surfaces.
- This research has important implications for developing robust and efficient robotic systems capable of operating in challenging, unstructured environments.
Plain English Explanation
Robots today often use cameras, lasers, and other sensors to understand their surroundings and navigate through the world. However, these sensors can be limited in certain environments, such as when visibility is poor or when surfaces are difficult to detect.
The researchers in this paper propose an alternative approach that takes inspiration from how some animals, like rats and shrews, use their whiskers to sense and interact with their environment. By equipping a robot with artificial "whiskers," the system can detect and respond to the physical surfaces it encounters, even in the absence of clear visual information.
The key idea is that as the robot's whiskers brush against objects, the system can use the resulting tactile feedback to build up a detailed 3D model of the nearby surfaces. This 3D map can then be used to help the robot safely navigate through its surroundings, avoiding obstacles and finding the best path to its destination.
Importantly, this whisker-based sensing and mapping approach is "passive," meaning the robot doesn't need to actively probe its environment with energy-emitting sensors like lasers or sonar. This makes the system more energy-efficient and potentially safer to use in certain applications.
Overall, this research represents an innovative step towards creating robots that can better understand and interact with complex, unstructured environments using the rich tactile information available through whisker-like sensors.
Technical Explanation
The paper proposes a novel approach for navigation and 3D surface reconstruction using passive whisker sensing. The key components of the system include:
-
Whisker Sensor Array: The robot is equipped with an array of whisker-like sensors that can detect the contact forces and torques as the whiskers interact with nearby surfaces.
-
Tactile SLAM: The system uses the tactile feedback from the whiskers to simultaneously localize the robot and build a 3D map of the surrounding surfaces through a Simultaneous Localization and Mapping (SLAM) algorithm.
-
Navigation Planning: The reconstructed 3D surface model is then used to plan safe and efficient navigation paths for the robot to reach its desired destination, avoiding obstacles and hazards.
The researchers evaluated their approach through a series of simulations and real-world experiments, demonstrating the system's ability to accurately reconstruct 3D surfaces and navigate through cluttered environments. The results showcase the potential of passive whisker sensing as a robust and energy-efficient alternative to traditional robotic perception methods, especially in challenging scenarios where visual information may be limited.
Critical Analysis
The paper presents a compelling approach to robotic navigation and 3D mapping that leverages the unique tactile capabilities of whisker-like sensors. The authors have done a thorough job of designing and evaluating their system, and the results demonstrate the potential of this technology.
However, the paper also acknowledges several limitations and areas for further research. For example, the current system relies on a priori knowledge of the whisker sensor properties, which may not always be available in real-world applications. Additionally, the 3D reconstruction accuracy and navigation performance may be sensitive to the specific whisker design and placement on the robot platform.
Further work is needed to address these challenges and explore the integration of this passive whisker sensing approach with other perception modalities, such as visuo-tactile sensing or collective decision-making in robot swarms. Additionally, testing the system's robustness in more complex, real-world environments, including those with 3D terrain challenges or multi-wheeled fully actuated platforms, could further validate the practical applicability of this approach.
Conclusion
This paper presents a novel and promising approach for navigation and 3D surface reconstruction using passive whisker sensing. By leveraging the rich tactile information available through whisker-like sensors, the system can build detailed 3D models of its surroundings and navigate complex environments without relying solely on visual perception.
The reported results demonstrate the potential of this technology to enhance the capabilities of robotic systems, particularly in scenarios where traditional sensors may be limited. Further development and integration with other perception modalities could lead to even more robust and versatile robotic platforms capable of safely and efficiently operating in a wide range of unstructured, real-world environments.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Navigation and 3D Surface Reconstruction from Passive Whisker Sensing
Michael A. Lin, Hao Li, Chengyi Xing, Mark R. Cutkosky
Whiskers provide a way to sense surfaces in the immediate environment without disturbing it. In this paper we present a method for using highly flexible, curved, passive whiskers mounted along a robot arm to gather sensory data as they brush past objects during normal robot motion. The information is useful both for guiding the robot in cluttered spaces and for reconstructing the exposed faces of objects. Surface reconstruction depends on accurate localization of contact points along each whisker. We present an algorithm based on Bayesian filtering that rapidly converges to within 1,mm of the actual contact locations. The piecewise-continuous history of contact locations from each whisker allows for accurate reconstruction of curves on object surfaces. Employing multiple whiskers and traces, we are able to produce an occupancy map of proximal objects.
Read more6/11/2024
🛠️
0
Haptics-based, higher-order Sensory Substitution designed for Object Negotiation in Blindness and Low Vision: Virtual Whiskers
Junchi Feng, Giles Hamilton-Fletcher, Todd E Hudson, Mahya Beheshti, Maurizio Porfiri, John-Ross Rizzo
People with blindness and low vision (pBLV) face challenges in navigating. Mobility aids are crucial for enhancing independence and safety. This paper presents an electronic travel aid that leverages a haptic-based, higher-order sensory substitution approach called Virtual Whiskers, designed to help pBLV negotiate obstacles effectively, efficiently, and safely. Virtual Whiskers is equipped with a plurality of modular vibration units that operate independently to deliver haptic feedback to users. Virtual Whiskers features two navigation modes: open path mode and depth mode, each addressing obstacle negotiation from different perspectives. The open path mode detects and delineate a traversable area within an analyzed field of view. Then, it guides the user through to the traversable direction adaptive vibratory feedback. The depth mode assists users in negotiating obstacles by highlighting spatial areas with prominent obstacles via haptic feedback. We recruited 10 participants with blindness or low vision to participate in user testing for Virtual Whiskers. Results show that the device significantly reduces idle periods and decreases the number of cane contacts. Virtual Whiskers is a promising obstacle negotiation strategy that demonstrating great potential to assist with pBLV navigation.
Read more8/28/2024
🐍
0
Sensing environmental interaction physics to traverse cluttered obstacles
Yaqing Wang, Ling Xu, Chen Li
When legged robots physically interact with obstacles in applications such as search and rescue through rubble and planetary exploration across Martain rocks, even the most advanced ones struggle because they lack a fundamental framework to model the robot-obstacle physical interaction paralleling artificial potential fields for obstacle avoidance. To remedy this, recent studies established a novel framework - potential energy landscape modeling - that explains and predicts the destabilizing transitions across locomotor modes from the physical interaction between robots and obstacles, and governs a wide range of complex locomotion. However, this framework was confined to the laboratory because we lack methods to obtain the potential energy landscape in unknown environments. Here, we explore the feasibility of introducing this framework to such environments. We showed that a robot can reconstruct the potential energy landscape for unknown obstacles by measuring the obstacle contact forces and resulting torques. To elaborate, we developed a minimalistic robot capable of sensing contact forces and torques when propelled against a pair of grass-like obstacles. Despite the forces and torques not being fully conservative, they well-matched the potential energy landscape gradients, and the reconstructed landscape well-matched ground truth. In addition, we found that using normal forces and torques and head oscillation inspired by cockroach observations further improved the estimation of conservative ones. Our study will finally inspire free-running robots to achieve low-effort, zero-shot traversing clustered, large obstacles in real-world applications by sampling contact forces and torques and reconstructing the landscape around its neighboring states in real time.
Read more8/27/2024
0
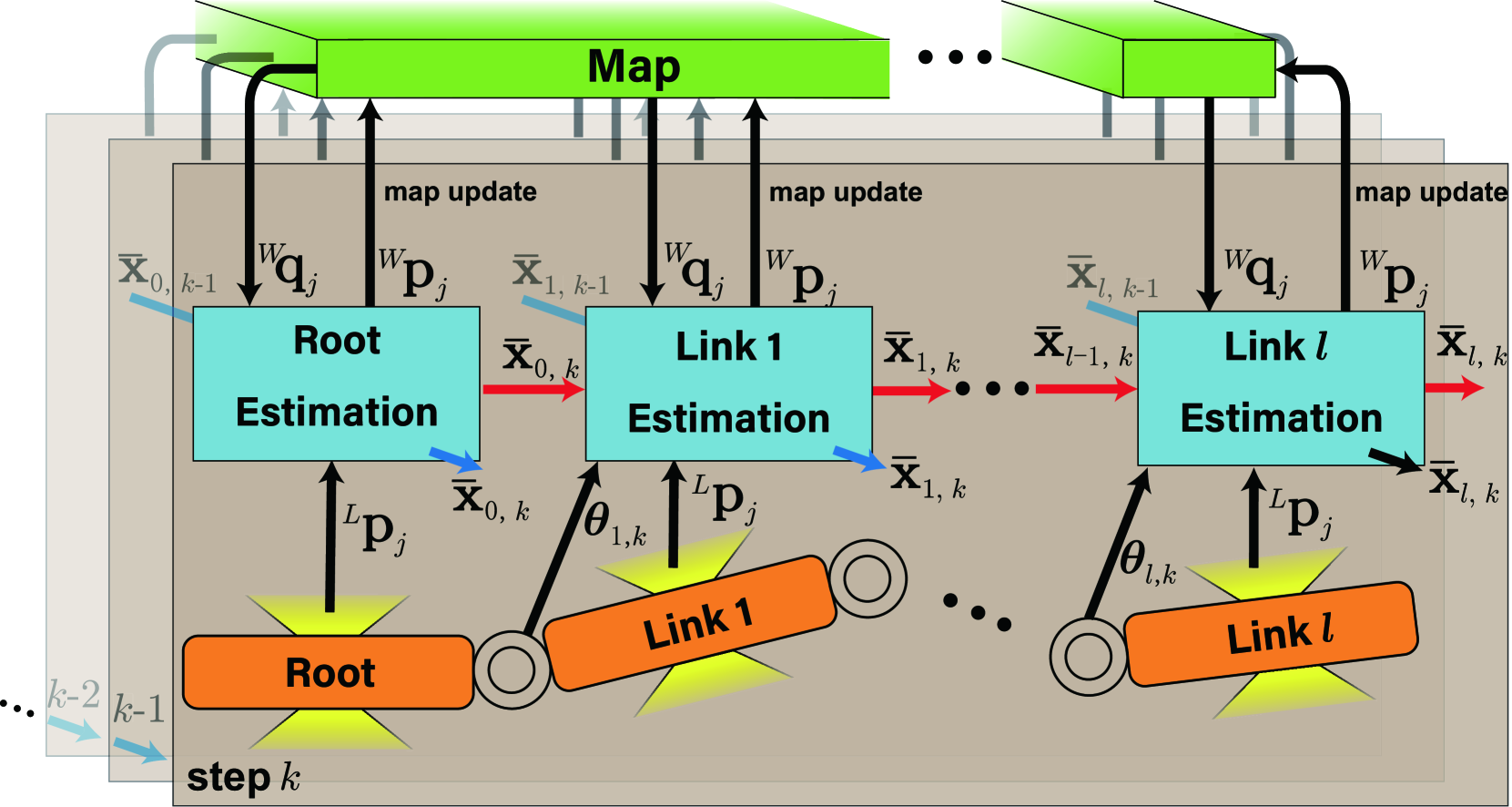
New!State Estimation and Environment Recognition for Articulated Structures via Proximity Sensors Distributed over the Whole Body
Kengo Iwao, Hikaru Arita, Kenji Tahara
For robots with low rigidity, determining the robot's state based solely on kinematics is challenging. This is particularly crucial for a robot whose entire body is in contact with the environment, as accurate state estimation is essential for environmental interaction. We propose a method for simultaneous articulated robot posture estimation and environmental mapping by integrating data from proximity sensors distributed over the whole body. Our method extends the discrete-time model, typically used for state estimation, to the spatial direction of the articulated structure. The simulations demonstrate that this approach significantly reduces estimation errors.
Read more9/20/2024