State Estimation and Environment Recognition for Articulated Structures via Proximity Sensors Distributed over the Whole Body

0
Sign in to get full access
Overview
- This paper presents a method for estimating the state and recognizing the environment of articulated structures using proximity sensors distributed across the whole body.
- The approach aims to enable robots to better understand their surroundings and interact with the environment more effectively.
- Key ideas include using a network of proximity sensors, leveraging kinematics and environmental cues, and combining state estimation and environment recognition.
Plain English Explanation
The paper describes a way for robots to better understand their surroundings and how they are interacting with the world around them. The key idea is using lots of small sensors that can detect nearby objects spread all over the robot's body. By combining the information from these sensors with the robot's knowledge of its own movements and shape, the system can estimate the robot's current position and orientation (state estimation) as well as recognize features of the environment (environment recognition).
This could be useful for robots that need to navigate complex environments and interact with objects and people in a safe and effective way. For example, a robot assistant in a home or office might use this to better understand its surroundings and how people are moving around it, allowing it to avoid collisions and anticipate their needs. Or a robot doing tasks in a factory or construction site could use it to keep track of its position and orientation relative to the objects and structures it is working with.
Technical Explanation
The proposed method uses a network of proximity sensors distributed over the entire surface of an articulated structure, such as a robot. These sensors provide information about the distance to nearby objects, which is then combined with the known kinematics of the structure to estimate its current state (i.e., position and orientation) and recognize features of the environment.
The key steps are:
-
Sensor Modeling: The relationship between the proximity sensor readings and the geometric environment is modeled using a combination of analytical and data-driven techniques.
-
State Estimation: An optimization-based state estimation framework is used to infer the current state of the articulated structure by integrating the sensor data and kinematic information.
-
Environment Recognition: The estimated state and sensor data are used to recognize relevant features of the environment, such as the presence and location of obstacles, walls, or other objects of interest.
The authors demonstrate the effectiveness of their approach through experiments with a simulated robotic manipulator and validate the results using real-world data from a physical robot.
Critical Analysis
The paper presents a promising approach for enhancing the environmental awareness of articulated robots, which could have significant implications for improving their safety and performance in complex, unstructured settings. However, some potential limitations and areas for further research are worth considering:
- The experiments were conducted in relatively simple, controlled environments. Further testing would be needed to assess the method's scalability and robustness to more realistic, cluttered, and dynamic environments.
- The environment recognition capabilities are focused on basic geometric features, such as obstacles and walls. Extending the approach to recognize more sophisticated environmental cues or semantic information could further enhance the robot's situational understanding.
- The computational complexity and real-time performance of the state estimation and environment recognition algorithms were not extensively evaluated, which could be an important consideration for practical deployment on resource-constrained robotic platforms.
Overall, the proposed method represents a valuable contribution to the field of robotic perception and environmental awareness, but continued research and development would be needed to fully realize its potential benefits in real-world applications.
Conclusion
This paper presents a novel approach for state estimation and environment recognition of articulated structures using a distributed network of proximity sensors. By combining sensor data with kinematic information, the method can infer the current state of the robot and recognize relevant features of the surrounding environment. This could enable robots to better understand and interact with their surroundings, with potential applications in areas such as safe and efficient robot estimation and tightly-coupled state estimation for legged robots. While further research is needed to address the identified limitations, the proposed framework represents a promising step towards enhancing the environmental awareness and autonomy of articulated robotic systems.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
New!State Estimation and Environment Recognition for Articulated Structures via Proximity Sensors Distributed over the Whole Body
Kengo Iwao, Hikaru Arita, Kenji Tahara
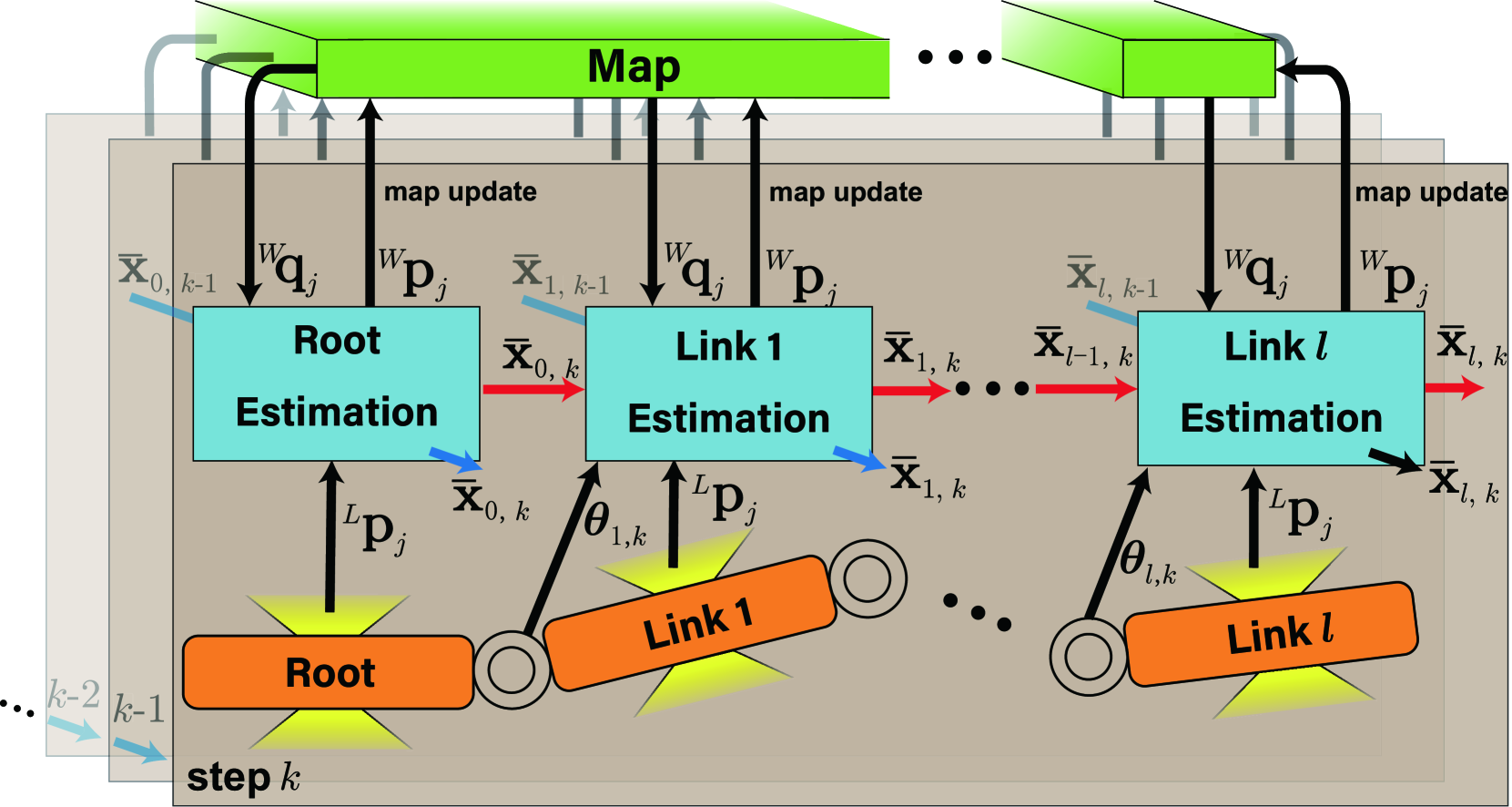
For robots with low rigidity, determining the robot's state based solely on kinematics is challenging. This is particularly crucial for a robot whose entire body is in contact with the environment, as accurate state estimation is essential for environmental interaction. We propose a method for simultaneous articulated robot posture estimation and environmental mapping by integrating data from proximity sensors distributed over the whole body. Our method extends the discrete-time model, typically used for state estimation, to the spatial direction of the articulated structure. The simulations demonstrate that this approach significantly reduces estimation errors.
Read more9/20/2024
🚀
0
Multimodal Active Measurement for Human Mesh Recovery in Close Proximity
Takahiro Maeda, Keisuke Takeshita, Norimichi Ukita, Kazuhito Tanaka
For physical human-robot interactions (pHRI), a robot needs to estimate the accurate body pose of a target person. However, in these pHRI scenarios, the robot cannot fully observe the target person's body with equipped cameras because the target person must be close to the robot for physical interaction. This close distance leads to severe truncation and occlusions and thus results in poor accuracy of human pose estimation. For better accuracy in this challenging environment, we propose an active measurement and sensor fusion framework of the equipped cameras with touch and ranging sensors such as 2D LiDAR. Touch and ranging sensor measurements are sparse but reliable and informative cues for localizing human body parts. In our active measurement process, camera viewpoints and sensor placements are dynamically optimized to measure body parts with higher estimation uncertainty, which is closely related to truncation or occlusion. In our sensor fusion process, assuming that the measurements of touch and ranging sensors are more reliable than the camera-based estimations, we fuse the sensor measurements to the camera-based estimated pose by aligning the estimated pose towards the measured points. Our proposed method outperformed previous methods on the standard occlusion benchmark with simulated active measurement. Furthermore, our method reliably estimated human poses using a real robot, even with practical constraints such as occlusion by blankets.
Read more9/11/2024
0
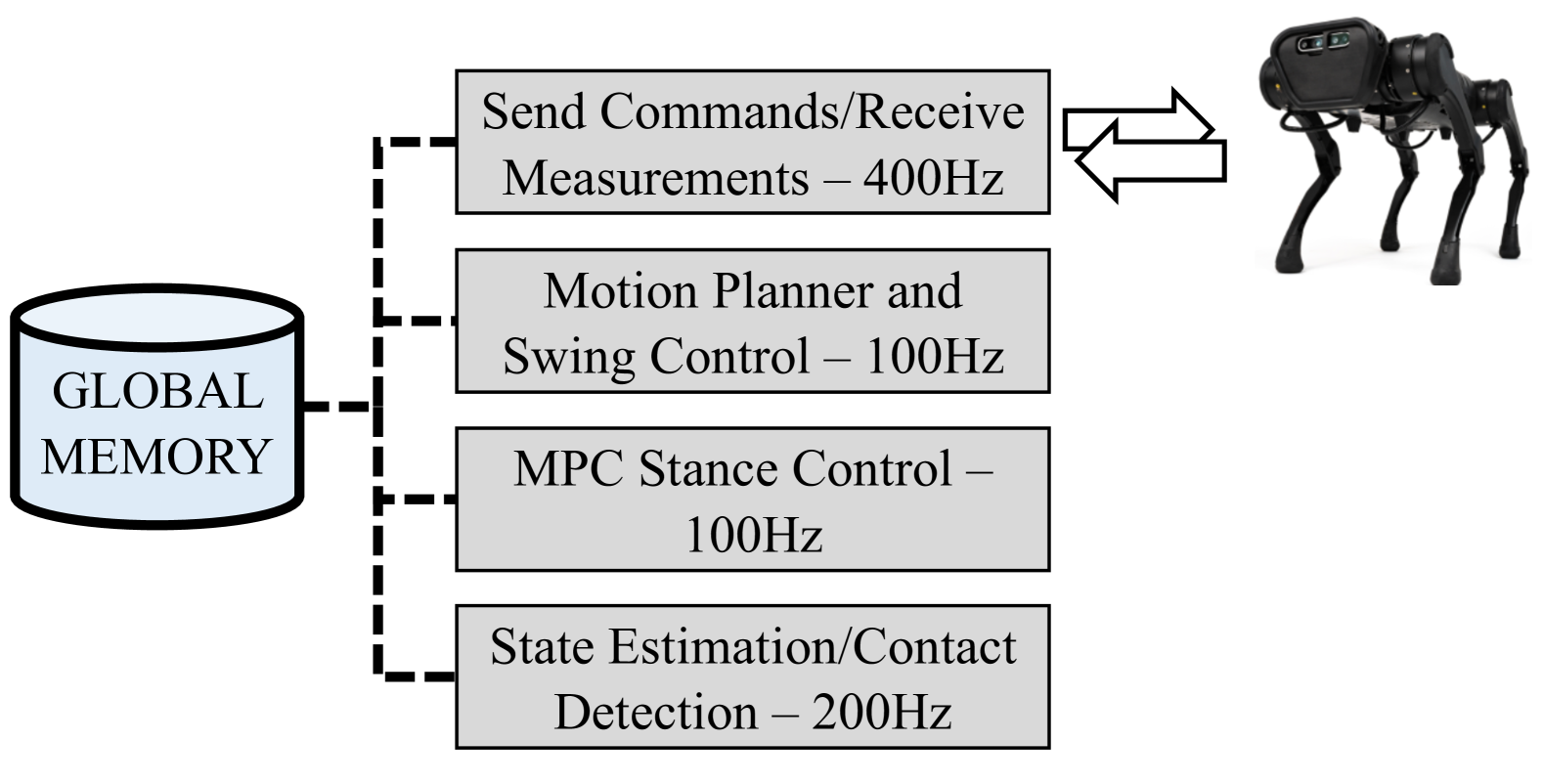
Simultaneous State Estimation and Contact Detection for Legged Robots by Multiple-Model Kalman Filtering
Marcel Menner, Karl Berntorp
This paper proposes an algorithm for combined contact detection and state estimation for legged robots. The proposed algorithm models the robot's movement as a switched system, in which different modes relate to different feet being in contact with the ground. The key element in the proposed algorithm is an interacting multiple-model Kalman filter, which identifies the currently-active mode defining contacts, while estimating the state. The rationale for the proposed estimation framework is that contacts (and contact forces) impact the robot's state and vice versa. This paper presents validation studies with a quadruped using (i) the high-fidelity simulator Gazebo for a comparison with ground truth values and a baseline estimator, and (ii) hardware experiments with the Unitree A1 robot. The simulation study shows that the proposed algorithm outperforms the baseline estimator, which does not simultaneous detect contacts. The hardware experiments showcase the applicability of the proposed algorithm and highlights the ability to detect contacts.
Read more4/5/2024
0
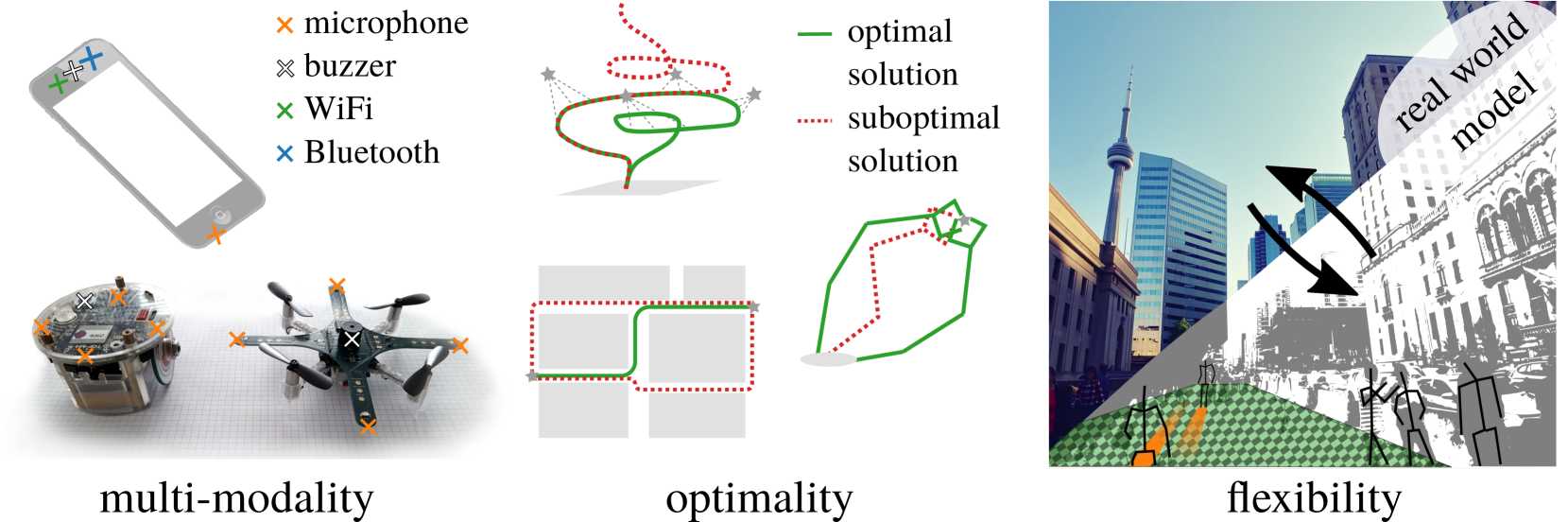
Safe and Efficient Estimation for Robotics through the Optimal Use of Resources
Frederike Dumbgen
In order to operate in and interact with the physical world, robots need to have estimates of the current and future state of the environment. We thus equip robots with sensors and build models and algorithms that, given some measurements, produce estimates of the current or future states. Environments can be unpredictable and sensors are not perfect. Therefore, it is important to both use all information available, and to do so optimally: making sure that we get the best possible answer from the amount of information we have. However, in prevalent research, uncommon sensors, such as sound or radio-frequency signals, are commonly ignored for state estimation; and the most popular solvers employed to produce state estimates are only of local nature, meaning they may produce suboptimal estimates for the typically non-convex estimation problems. My research aims to use resources more optimally, by building on 1) multi-modality: using ubiquitous RF transceivers and microphones to support state estimation, 2) building certifiably optimal solvers and 3) learning and improving adequate models from data.
Read more5/30/2024