ND-SDF: Learning Normal Deflection Fields for High-Fidelity Indoor Reconstruction

0

Sign in to get full access
Overview
- The paper introduces ND-SDF, a novel method for high-fidelity indoor reconstruction using normal deflection fields.
- ND-SDF learns a Normal Deflection Field (NDF) to represent fine details in indoor scenes, leading to improved reconstruction quality compared to prior signed distance field (SDF) approaches.
- The method uses a neural network to predict the NDF from a sparse set of depth and normal observations, enabling high-fidelity reconstructions from limited sensor data.
Plain English Explanation
ND-SDF is a new technique for creating highly detailed 3D models of indoor spaces using limited sensor data. Traditional 3D reconstruction methods, like signed distance fields (SDFs), struggle to capture fine details in complex environments.
ND-SDF addresses this by learning to predict a Normal Deflection Field (NDF) - a representation that encodes the fine-grained normal directions of surfaces in the scene. This allows the system to reconstruct details like furniture edges, wall textures, and other small features that are often missed by other approaches.
The key innovation is using a neural network to estimate the NDF from a sparse set of depth and normal observations. This enables high-quality 3D models to be created from limited sensor data, rather than requiring dense, high-resolution scans. The NDF representation helps fill in the gaps and reconstruct the scene with much greater fidelity.
Technical Explanation
ND-SDF builds on prior work in signed distance field (SDF) representations for 3D reconstruction. However, it addresses a key limitation of SDFs - their inability to faithfully capture fine geometric details.
The core idea is to learn a Normal Deflection Field (NDF) that encodes the local normal directions of surfaces in the scene. This NDF is predicted from a sparse set of depth and normal observations using a neural network. The NDF is then used, along with the SDF, to reconstruct a high-fidelity 3D model of the indoor environment.
The authors propose a novel neural network architecture that takes in the sparse sensor data and outputs the NDF. This NDF is then combined with the SDF to produce the final 3D reconstruction, allowing fine details to be captured that would be missed by the SDF alone.
The method is evaluated on several indoor reconstruction datasets, demonstrating significant improvements in reconstruction quality compared to prior SDF-based approaches. The learned NDF is shown to be a powerful representation for encoding the geometric nuances of complex indoor scenes.
Critical Analysis
The key strength of ND-SDF is its ability to reconstruct high-fidelity 3D models from limited sensor data, an important capability for many real-world applications. By learning the NDF, the method is able to capture fine details that would be lost using traditional SDF-based techniques.
However, the paper does not address certain limitations and potential issues with the approach. For example, the reliance on depth and normal observations may make the method sensitive to sensor noise or calibration errors. Additionally, the computational complexity of predicting the full NDF could limit the scalability of the approach to large-scale scenes.
Further research would be needed to understand the robustness of ND-SDF to real-world sensing challenges, as well as to explore potential optimizations to improve its efficiency and enable deployment in resource-constrained settings. Nonetheless, the core idea of leveraging normal deflection fields represents a promising direction for enhancing the fidelity of indoor 3D reconstructions.
Conclusion
ND-SDF introduces a novel technique for high-fidelity indoor 3D reconstruction by learning a Normal Deflection Field (NDF) representation. This NDF, combined with a traditional signed distance field (SDF), allows the method to capture fine geometric details that are often missed by prior SDF-based approaches.
The ability to reconstruct complex indoor environments from limited sensor data is a valuable capability, with potential applications in areas like robotics, augmented reality, and digital twinning. While the approach has some limitations that warrant further research, ND-SDF represents an important step forward in the quest for high-quality, efficient 3D scene understanding.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
ND-SDF: Learning Normal Deflection Fields for High-Fidelity Indoor Reconstruction
Ziyu Tang, Weicai Ye, Yifan Wang, Di Huang, Hujun Bao, Tong He, Guofeng Zhang
Neural implicit reconstruction via volume rendering has demonstrated its effectiveness in recovering dense 3D surfaces. However, it is non-trivial to simultaneously recover meticulous geometry and preserve smoothness across regions with differing characteristics. To address this issue, previous methods typically employ geometric priors, which are often constrained by the performance of the prior models. In this paper, we propose ND-SDF, which learns a Normal Ddeflection field to represent the angular deviation between the scene normal and the prior normal. Unlike previous methods that uniformly apply geometric priors on all samples, introducing significant bias in accuracy, our proposed normal deflection field dynamically learns and adapts the utilization of samples based on their specific characteristics, thereby improving both the accuracy and effectiveness of the model. Our method not only obtains smooth weakly textured regions such as walls and floors but also preserves the geometric details of complex structures. In addition, we introduce a novel ray sampling strategy based on the deflection angle to facilitate the unbiased rendering process, which significantly improves the quality and accuracy of intricate surfaces, especially on thin structures. Consistent improvements on various challenging datasets demonstrate the superiority of our method.
Read more8/23/2024
🧠
0
NC-SDF: Enhancing Indoor Scene Reconstruction Using Neural SDFs with View-Dependent Normal Compensation
Ziyi Chen, Xiaolong Wu, Yu Zhang
State-of-the-art neural implicit surface representations have achieved impressive results in indoor scene reconstruction by incorporating monocular geometric priors as additional supervision. However, we have observed that multi-view inconsistency between such priors poses a challenge for high-quality reconstructions. In response, we present NC-SDF, a neural signed distance field (SDF) 3D reconstruction framework with view-dependent normal compensation (NC). Specifically, we integrate view-dependent biases in monocular normal priors into the neural implicit representation of the scene. By adaptively learning and correcting the biases, our NC-SDF effectively mitigates the adverse impact of inconsistent supervision, enhancing both the global consistency and local details in the reconstructions. To further refine the details, we introduce an informative pixel sampling strategy to pay more attention to intricate geometry with higher information content. Additionally, we design a hybrid geometry modeling approach to improve the neural implicit representation. Experiments on synthetic and real-world datasets demonstrate that NC-SDF outperforms existing approaches in terms of reconstruction quality.
Read more5/2/2024
🧠
0
DebSDF: Delving into the Details and Bias of Neural Indoor Scene Reconstruction
Yuting Xiao, Jingwei Xu, Zehao Yu, Shenghua Gao
In recent years, the neural implicit surface has emerged as a powerful representation for multi-view surface reconstruction due to its simplicity and state-of-the-art performance. However, reconstructing smooth and detailed surfaces in indoor scenes from multi-view images presents unique challenges. Indoor scenes typically contain large texture-less regions, making the photometric loss unreliable for optimizing the implicit surface. Previous work utilizes monocular geometry priors to improve the reconstruction in indoor scenes. However, monocular priors often contain substantial errors in thin structure regions due to domain gaps and the inherent inconsistencies when derived independently from different views. This paper presents textbf{DebSDF} to address these challenges, focusing on the utilization of uncertainty in monocular priors and the bias in SDF-based volume rendering. We propose an uncertainty modeling technique that associates larger uncertainties with larger errors in the monocular priors. High-uncertainty priors are then excluded from optimization to prevent bias. This uncertainty measure also informs an importance-guided ray sampling and adaptive smoothness regularization, enhancing the learning of fine structures. We further introduce a bias-aware signed distance function to density transformation that takes into account the curvature and the angle between the view direction and the SDF normals to reconstruct fine details better. Our approach has been validated through extensive experiments on several challenging datasets, demonstrating improved qualitative and quantitative results in reconstructing thin structures in indoor scenes, thereby outperforming previous work.
Read more7/12/2024
0
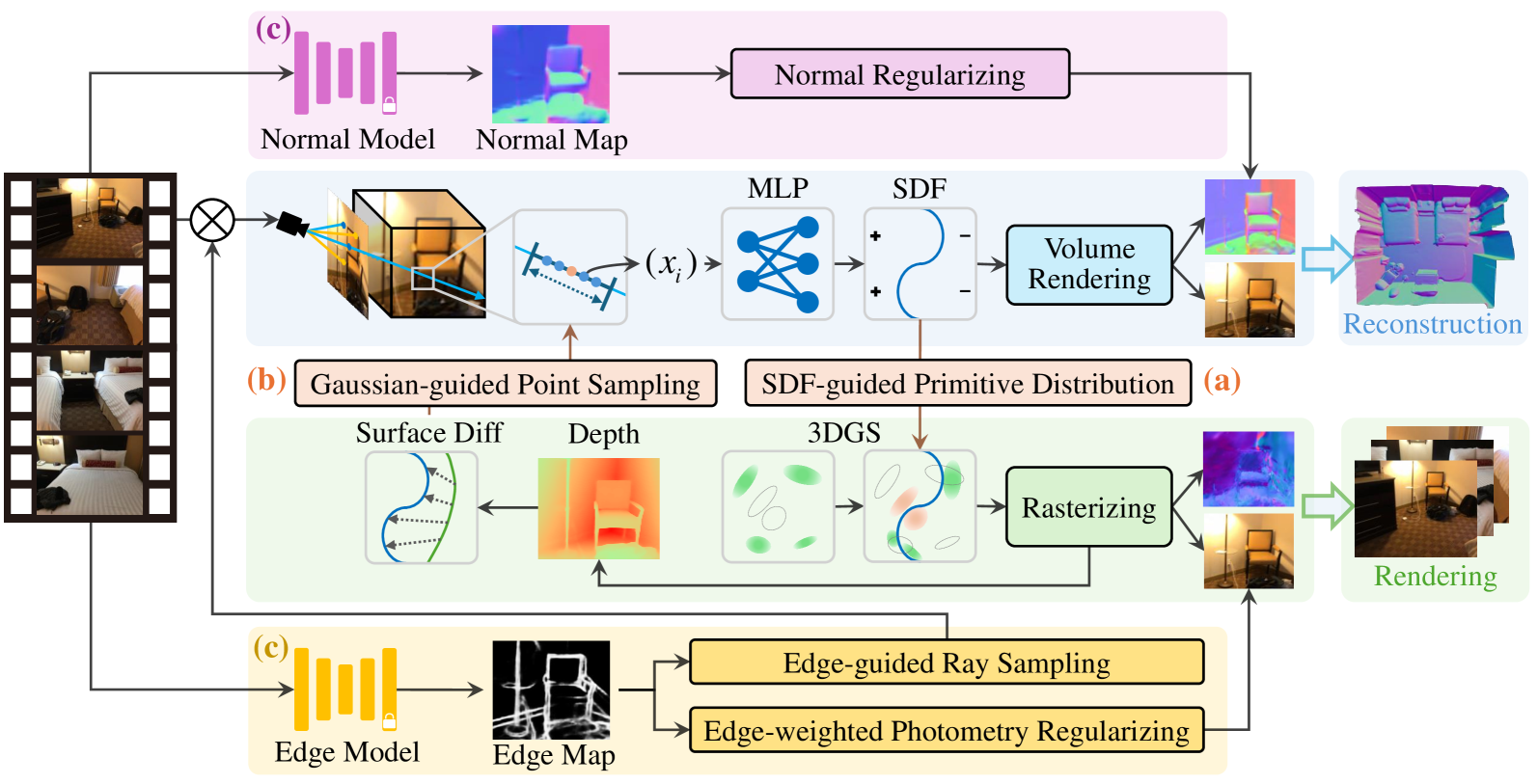
GaussianRoom: Improving 3D Gaussian Splatting with SDF Guidance and Monocular Cues for Indoor Scene Reconstruction
Haodong Xiang, Xinghui Li, Xiansong Lai, Wanting Zhang, Zhichao Liao, Kai Cheng, Xueping Liu
Recently, 3D Gaussian Splatting(3DGS) has revolutionized neural rendering with its high-quality rendering and real-time speed. However, when it comes to indoor scenes with a significant number of textureless areas, 3DGS yields incomplete and noisy reconstruction results due to the poor initialization of the point cloud and under-constrained optimization. Inspired by the continuity of signed distance field (SDF), which naturally has advantages in modeling surfaces, we present a unified optimizing framework integrating neural SDF with 3DGS. This framework incorporates a learnable neural SDF field to guide the densification and pruning of Gaussians, enabling Gaussians to accurately model scenes even with poor initialized point clouds. At the same time, the geometry represented by Gaussians improves the efficiency of the SDF field by piloting its point sampling. Additionally, we regularize the optimization with normal and edge priors to eliminate geometry ambiguity in textureless areas and improve the details. Extensive experiments in ScanNet and ScanNet++ show that our method achieves state-of-the-art performance in both surface reconstruction and novel view synthesis.
Read more5/31/2024