NeRO: Neural Road Surface Reconstruction

0

Sign in to get full access
Overview
- This paper presents NeRO, a neural approach to reconstruct the surface of roads from sensor data.
- NeRO uses a multi-resolution hash-based positional encoding to efficiently encode the road geometry.
- The model also leverages semantic labels to improve the reconstruction quality.
- Experiments show NeRO outperforms previous methods in accuracy and efficiency.
Plain English Explanation
NeRO: Neural Road Surface Reconstruction is a new technique for creating detailed 3D models of road surfaces from sensor data. Traditional methods for road reconstruction can be slow and inaccurate, but NeRO uses a novel neural network approach to tackle this problem.
The key idea behind NeRO is to use a multi-resolution hash-based positional encoding to efficiently represent the complex geometry of the road surface. This encoding allows the neural network to capture fine details without requiring excessive computation or memory. The model also incorporates semantic labels, like the boundaries between the road and sidewalk, to further improve the reconstruction quality.
Compared to previous methods, NeRO is able to generate more accurate 3D road models much faster. This could have important applications in areas like autonomous driving, urban planning, and infrastructure maintenance, where up-to-date and detailed road information is crucial.
Technical Explanation
The NeRO model uses a neural network architecture to reconstruct the 3D surface of roads from sensor data like LiDAR and imagery. At the core of NeRO is a multi-resolution hash-based positional encoding that efficiently represents the complex geometry of the road.
This positional encoding maps the 3D road coordinates into a high-dimensional feature space, allowing the neural network to capture fine-grained details. NeRO also leverages semantic labels, such as the boundaries between the road and sidewalk, to further improve the reconstruction accuracy.
The paper demonstrates that NeRO outperforms previous state-of-the-art methods on benchmark datasets in terms of both reconstruction quality and computational efficiency. This is a significant advancement that could enable more accurate and scalable road modeling for a variety of applications.
Critical Analysis
The NeRO paper presents a promising approach to 3D road reconstruction, but there are a few potential limitations worth noting:
-
The method relies on the availability of accurate semantic labels, which may not always be easy to obtain in practice. The paper does not explore how the model would perform without these labels.
-
The evaluation is primarily focused on quantitative metrics, but it would be helpful to see more qualitative assessments of the reconstructed road models and their real-world usability.
-
The paper does not discuss how NeRO would scale to large-scale road networks or handle complexities like intersections, bridges, and other road features.
-
It's unclear how robust the NeRO model is to noisy or incomplete sensor data, which is often a challenge in real-world deployment scenarios.
Further research exploring these aspects could help strengthen the practical applicability of the NeRO approach and identify potential areas for improvement.
Conclusion
NeRO: Neural Road Surface Reconstruction presents a novel neural network-based method for efficiently reconstructing detailed 3D models of road surfaces. The key innovations are the use of a multi-resolution hash-based positional encoding and the integration of semantic labels to improve reconstruction quality.
The experiments demonstrate that NeRO outperforms previous state-of-the-art techniques in both accuracy and computational efficiency. This advancement could have significant implications for a wide range of applications, such as autonomous driving, urban planning, and infrastructure maintenance, where accurate and up-to-date road information is crucial.
While the paper highlights the strengths of the NeRO approach, further research is needed to address potential limitations, such as the reliance on semantic labels and the scalability to large-scale road networks. Nonetheless, this work represents an exciting step forward in the field of 3D road reconstruction.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
NeRO: Neural Road Surface Reconstruction
Ruibo Wang, Song Zhang, Ping Huang, Donghai Zhang, Haoyu Chen
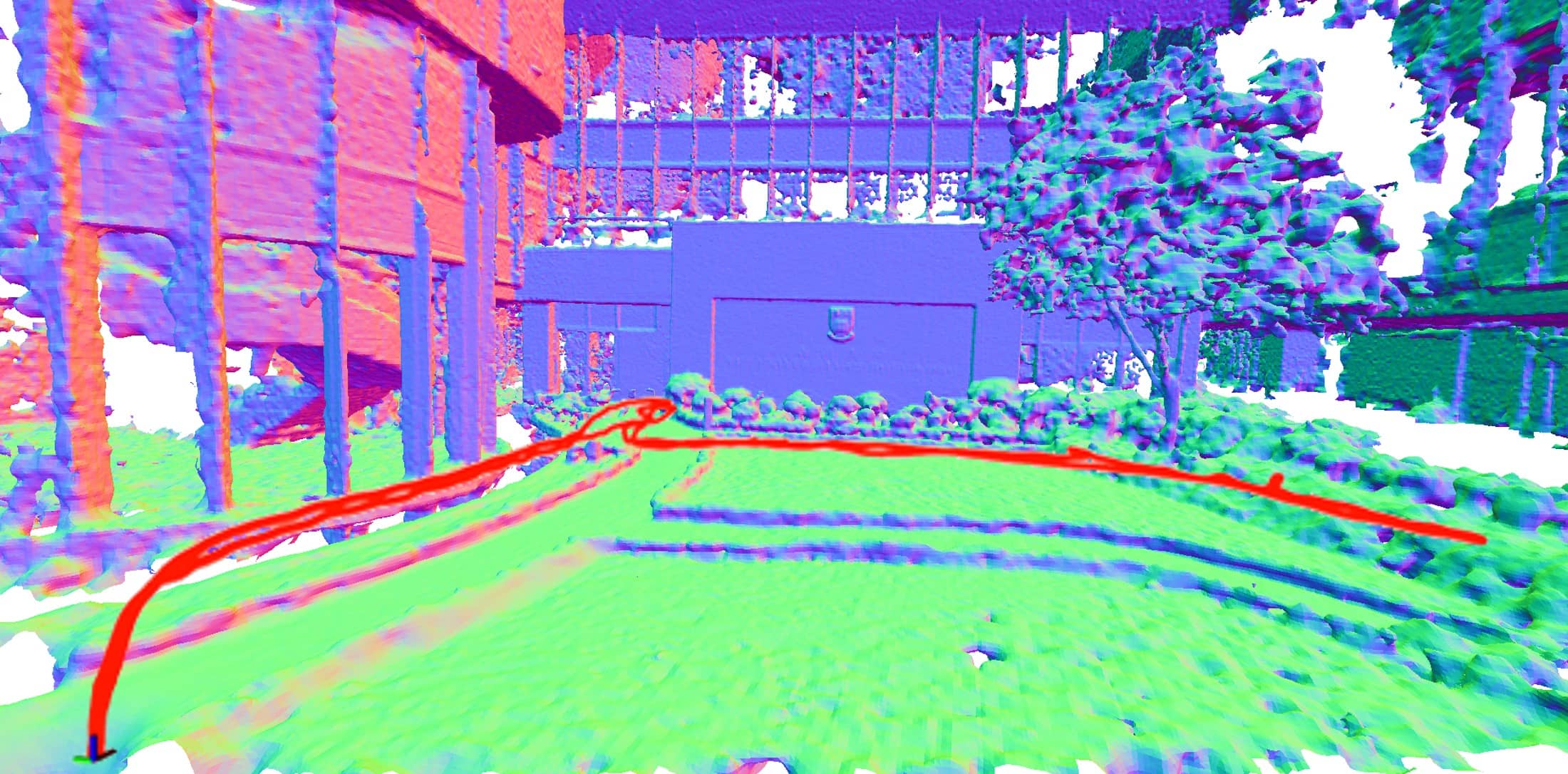
Accurately reconstructing road surfaces is pivotal for various applications especially in autonomous driving. This paper introduces a position encoding Multi-Layer Perceptrons (MLPs) framework to reconstruct road surfaces, with input as world coordinates x and y, and output as height, color, and semantic information. The effectiveness of this method is demonstrated through its compatibility with a variety of road height sources like vehicle camera poses, LiDAR point clouds, and SFM point clouds, robust to the semantic noise of images like sparse labels and noise semantic prediction, and fast training speed, which indicates a promising application for rendering road surfaces with semantics, particularly in applications demanding visualization of road surface, 4D labeling, and semantic groupings.
Read more5/29/2024
0
Neural Surface Reconstruction and Rendering for LiDAR-Visual Systems
Jianheng Liu, Chunran Zheng, Yunfei Wan, Bowen Wang, Yixi Cai, Fu Zhang
This paper presents a unified surface reconstruction and rendering framework for LiDAR-visual systems, integrating Neural Radiance Fields (NeRF) and Neural Distance Fields (NDF) to recover both appearance and structural information from posed images and point clouds. We address the structural visible gap between NeRF and NDF by utilizing a visible-aware occupancy map to classify space into the free, occupied, visible unknown, and background regions. This classification facilitates the recovery of a complete appearance and structure of the scene. We unify the training of the NDF and NeRF using a spatial-varying scale SDF-to-density transformation for levels of detail for both structure and appearance. The proposed method leverages the learned NDF for structure-aware NeRF training by an adaptive sphere tracing sampling strategy for accurate structure rendering. In return, NeRF further refines structural in recovering missing or fuzzy structures in the NDF. Extensive experiments demonstrate the superior quality and versatility of the proposed method across various scenarios. To benefit the community, the codes will be released at url{https://github.com/hku-mars/M2Mapping}.
Read more9/10/2024
0
Highway Networks for Improved Surface Reconstruction: The Role of Residuals and Weight Updates
A. Noorizadegan, Y. C. Hon, D. L. Young, C. S. Chen
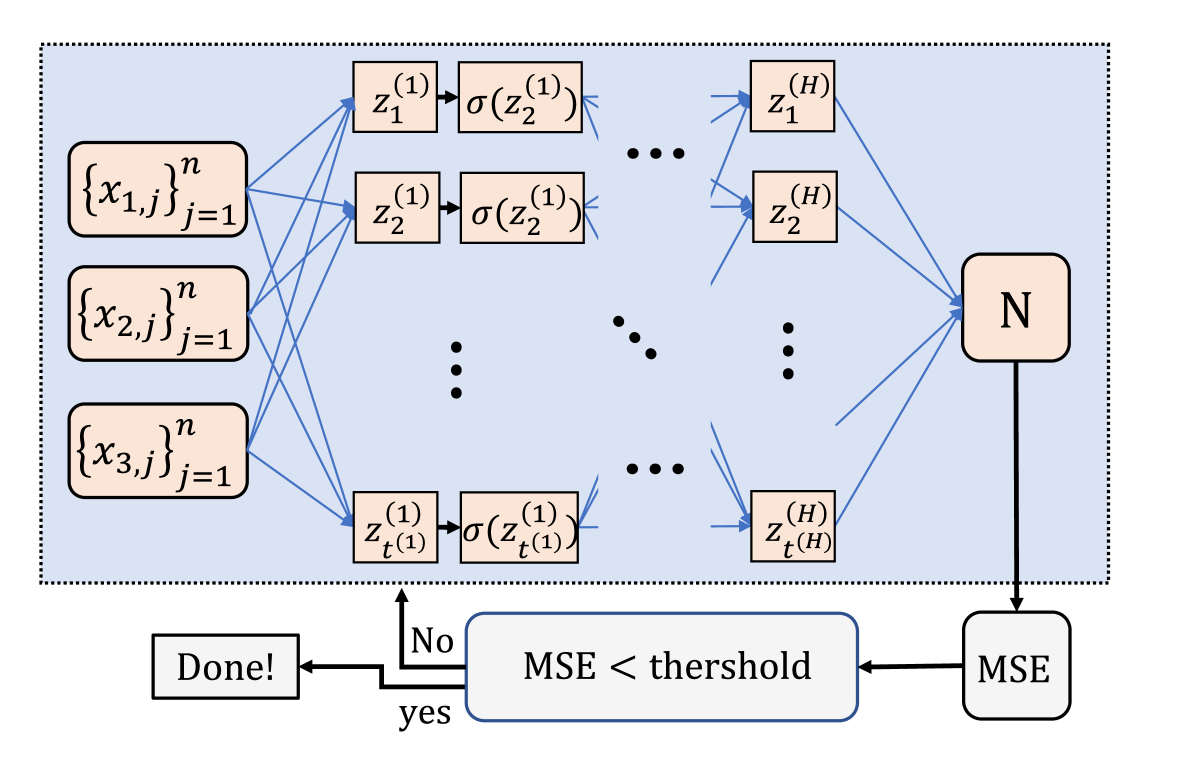
Surface reconstruction from point clouds is a fundamental challenge in computer graphics and medical imaging. In this paper, we explore the application of advanced neural network architectures for the accurate and efficient reconstruction of surfaces from data points. We introduce a novel variant of the Highway network (Hw) called Square-Highway (SqrHw) within the context of multilayer perceptrons and investigate its performance alongside plain neural networks and a simplified Hw in various numerical examples. These examples include the reconstruction of simple and complex surfaces, such as spheres, human hands, and intricate models like the Stanford Bunny. We analyze the impact of factors such as the number of hidden layers, interior and exterior points, and data distribution on surface reconstruction quality. Our results show that the proposed SqrHw architecture outperforms other neural network configurations, achieving faster convergence and higher-quality surface reconstructions. Additionally, we demonstrate the SqrHw's ability to predict surfaces over missing data, a valuable feature for challenging applications like medical imaging. Furthermore, our study delves into further details, demonstrating that the proposed method based on highway networks yields more stable weight norms and backpropagation gradients compared to the Plain Network architecture. This research not only advances the field of computer graphics but also holds utility for other purposes such as function interpolation and physics-informed neural networks, which integrate multilayer perceptrons into their algorithms.
Read more7/12/2024

0
RoMe: Towards Large Scale Road Surface Reconstruction via Mesh Representation
Ruohong Mei, Wei Sui, Jiaxin Zhang, Xue Qin, Gang Wang, Tao Peng, Cong Yang
In autonomous driving applications, accurate and efficient road surface reconstruction is paramount. This paper introduces RoMe, a novel framework designed for the robust reconstruction of large-scale road surfaces. Leveraging a unique mesh representation, RoMe ensures that the reconstructed road surfaces are accurate and seamlessly aligned with semantics. To address challenges in computational efficiency, we propose a waypoint sampling strategy, enabling RoMe to reconstruct vast environments by focusing on sub-areas and subsequently merging them. Furthermore, we incorporate an extrinsic optimization module to enhance the robustness against inaccuracies in extrinsic calibration. Our extensive evaluations of both public datasets and wild data underscore RoMe's superiority in terms of speed, accuracy, and robustness. For instance, it costs only 2 GPU hours to recover a road surface of 600*600 square meters from thousands of images. Notably, RoMe's capability extends beyond mere reconstruction, offering significant value for autolabeling tasks in autonomous driving applications. All related data and code are available at https://github.com/DRosemei/RoMe.
Read more6/24/2024