Neural MP: A Generalist Neural Motion Planner

0

Sign in to get full access
Overview
- Neural MP is a generalist neural motion planner that can handle a wide range of robotic tasks.
- It uses deep learning to plan robot motions, rather than relying on traditional motion planning algorithms.
- The paper presents the architecture and training approach for Neural MP, and evaluates its performance on various robotic tasks.
Plain English Explanation
Neural MP is a new way of planning the movements of robots. Instead of using traditional algorithms, Neural MP uses deep learning - a type of AI that can learn patterns from data. This allows Neural MP to handle a wide variety of robotic tasks, rather than being specialized for a specific type of task.
The key idea behind Neural MP is to train a neural network (a type of deep learning model) to plan robot motions. The neural network takes information about the robot's environment and task as input, and outputs a plan for how the robot should move. By training this neural network on many different robotic tasks, it can learn general principles for motion planning that can be applied to new situations.
The paper describes the specific architecture and training approach used for Neural MP. They evaluate how well it performs on tasks like navigating through cluttered environments, manipulating objects, and whole-body robot motion. The results show that Neural MP can match or even outperform traditional motion planning algorithms, while being much more flexible and generalizable.
Technical Explanation
The Neural MP paper presents a new neural network-based approach for motion planning in robotics. Rather than relying on traditional motion planning algorithms, which can be specialized and brittle, Neural MP uses deep learning to learn a generalist motion planner.
The key components of the Neural MP architecture include:
- Perception Encoder: This module takes in sensor data about the robot's environment and encodes it into a latent representation.
- Task Encoder: This module encodes information about the robot's task, such as goal positions or desired motions.
- Motion Decoder: This module takes the encoded perceptual and task information and outputs a sequence of robot joint positions to achieve the desired motion.
The model is trained end-to-end using imitation learning, where it learns to mimic the motions of an expert planner. This allows Neural MP to learn general principles of motion planning that can be applied to a wide range of robotic tasks, including navigation, manipulation, and whole-body motion.
The paper evaluates Neural MP on several benchmarks, showing that it can match or outperform traditional motion planning algorithms in terms of success rate and efficiency, while being much more flexible and generalizable.
Critical Analysis
The Neural MP paper presents a promising approach for motion planning in robotics, but there are a few potential limitations and areas for further research:
- Interpretability: As with many deep learning models, the inner workings of Neural MP may be opaque, making it difficult to understand why it makes certain decisions. This could be a concern for safety-critical applications.
- Robustness: The paper evaluates Neural MP in simulation, but its performance in the real world may be affected by factors like sensor noise and modeling errors. Further testing on physical robots would be valuable.
- Scalability: The paper focuses on relatively simple robotic tasks. Scaling Neural MP to more complex, high-dimensional robots and environments may introduce new challenges.
Overall, the Neural MP paper presents an interesting and promising approach to motion planning, but more research is needed to fully understand its capabilities and limitations.
Conclusion
The Neural MP paper introduces a novel neural network-based approach for motion planning in robotics. By using deep learning to learn a generalist motion planner, Neural MP can handle a wide range of robotic tasks, rather than being specialized for a particular type of motion.
The results show that Neural MP can match or outperform traditional motion planning algorithms in terms of success rate and efficiency, while being much more flexible and generalizable. This could have significant implications for the field of robotics, potentially enabling more adaptable and capable robot systems.
However, there are still some open questions and areas for further research, such as improving the interpretability and robustness of the model. Overall, the Neural MP paper represents an exciting step forward in the development of more versatile and capable motion planning systems for robotics.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Neural MP: A Generalist Neural Motion Planner
Murtaza Dalal, Jiahui Yang, Russell Mendonca, Youssef Khaky, Ruslan Salakhutdinov, Deepak Pathak
The current paradigm for motion planning generates solutions from scratch for every new problem, which consumes significant amounts of time and computational resources. For complex, cluttered scenes, motion planning approaches can often take minutes to produce a solution, while humans are able to accurately and safely reach any goal in seconds by leveraging their prior experience. We seek to do the same by applying data-driven learning at scale to the problem of motion planning. Our approach builds a large number of complex scenes in simulation, collects expert data from a motion planner, then distills it into a reactive generalist policy. We then combine this with lightweight optimization to obtain a safe path for real world deployment. We perform a thorough evaluation of our method on 64 motion planning tasks across four diverse environments with randomized poses, scenes and obstacles, in the real world, demonstrating an improvement of 23%, 17% and 79% motion planning success rate over state of the art sampling, optimization and learning based planning methods. Video results available at mihdalal.github.io/neuralmotionplanner
Read more9/10/2024

0
Hybrid Imitation-Learning Motion Planner for Urban Driving
Cristian Gariboldi, Matteo Corno, Beng Jin
With the release of open source datasets such as nuPlan and Argoverse, the research around learning-based planners has spread a lot in the last years. Existing systems have shown excellent capabilities in imitating the human driver behaviour, but they struggle to guarantee safe closed-loop driving. Conversely, optimization-based planners offer greater security in short-term planning scenarios. To confront this challenge, in this paper we propose a novel hybrid motion planner that integrates both learning-based and optimization-based techniques. Initially, a multilayer perceptron (MLP) generates a human-like trajectory, which is then refined by an optimization-based component. This component not only minimizes tracking errors but also computes a trajectory that is both kinematically feasible and collision-free with obstacles and road boundaries. Our model effectively balances safety and human-likeness, mitigating the trade-off inherent in these objectives. We validate our approach through simulation experiments and further demonstrate its efficacy by deploying it in real-world self-driving vehicles.
Read more9/5/2024

0
Planning with Adaptive World Models for Autonomous Driving
Arun Balajee Vasudevan, Neehar Peri, Jeff Schneider, Deva Ramanan
Motion planning is crucial for safe navigation in complex urban environments. Historically, motion planners (MPs) have been evaluated with procedurally-generated simulators like CARLA. However, such synthetic benchmarks do not capture real-world multi-agent interactions. nuPlan, a recently released MP benchmark, addresses this limitation by augmenting real-world driving logs with closed-loop simulation logic, effectively turning the fixed dataset into a reactive simulator. We analyze the characteristics of nuPlan's recorded logs and find that each city has its own unique driving behaviors, suggesting that robust planners must adapt to different environments. We learn to model such unique behaviors with BehaviorNet, a graph convolutional neural network (GCNN) that predicts reactive agent behaviors using features derived from recently-observed agent histories; intuitively, some aggressive agents may tailgate lead vehicles, while others may not. To model such phenomena, BehaviorNet predicts parameters of an agent's motion controller rather than predicting its spacetime trajectory (as most forecasters do). Finally, we present AdaptiveDriver, a model-predictive control (MPC) based planner that unrolls different world models conditioned on BehaviorNet's predictions. Our extensive experiments demonstrate that AdaptiveDriver achieves state-of-the-art results on the nuPlan closed-loop planning benchmark, reducing test error from 6.4% to 4.6%, even when applied to never-before-seen cities.
Read more6/18/2024
0
Neural Randomized Planning for Whole Body Robot Motion
Yunfan Lu, Yuchen Ma, David Hsu, Panpan Cai
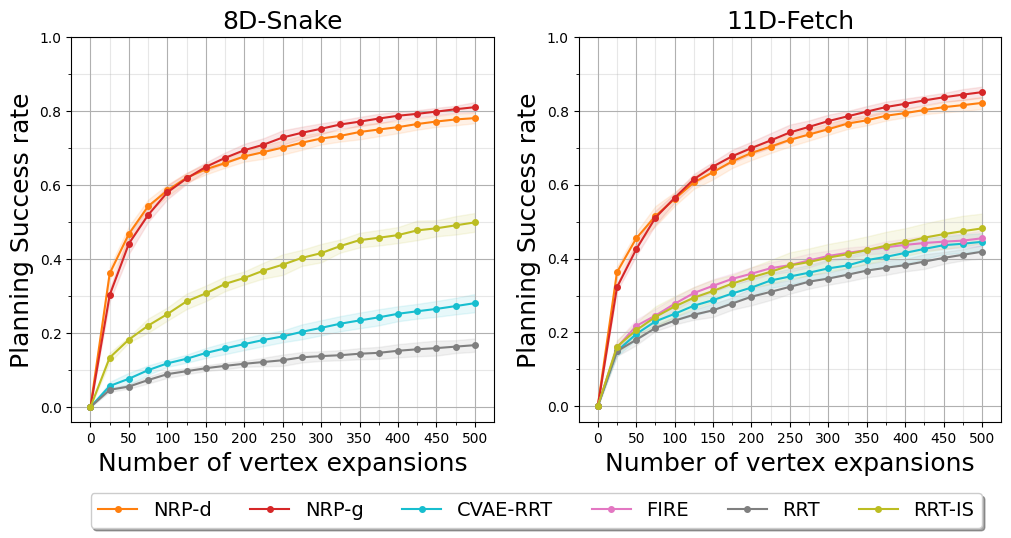
Robot motion planning has made vast advances over the past decades, but the challenge remains: robot mobile manipulators struggle to plan long-range whole-body motion in common household environments in real time, because of high-dimensional robot configuration space and complex environment geometry. To tackle the challenge, this paper proposes Neural Randomized Planner (NRP), which combines a global sampling-based motion planning (SBMP) algorithm and a local neural sampler. Intuitively, NRP uses the search structure inside the global planner to stitch together learned local sampling distributions to form a global sampling distribution adaptively. It benefits from both learning and planning. Locally, it tackles high dimensionality by learning to sample in promising regions from data, with a rich neural network representation. Globally, it composes the local sampling distributions through planning and exploits local geometric similarity to scale up to complex environments. Experiments both in simulation and on a real robot show NRP yields superior performance compared to some of the best classical and learning-enhanced SBMP algorithms. Further, despite being trained in simulation, NRP demonstrates zero-shot transfer to a real robot operating in novel household environments, without any fine-tuning or manual adaptation.
Read more8/13/2024