Hybrid Imitation-Learning Motion Planner for Urban Driving

0

Sign in to get full access
Overview
- This paper presents a hybrid imitation-learning motion planner for urban driving.
- The planner combines deep reinforcement learning and behavior cloning to generate safe and natural driving behaviors.
- Experiments show the planner outperforms prior methods on challenging urban driving tasks.
Plain English Explanation
The paper describes a new approach for teaching self-driving cars how to navigate crowded city streets. The key idea is to combine two different machine learning techniques:
-
Behavior cloning: This involves training the car to mimic the driving behaviors of expert human drivers, by learning from examples of their driving.
-
Reinforcement learning: This allows the car to explore different driving strategies and learn which ones are most effective at reaching its destination safely and efficiently.
By using both of these approaches together, the researchers were able to create a driving system that could handle complex urban environments better than previous methods. The system learns natural, human-like driving behaviors, while also being able to reason about the best actions to take in tricky situations.
Experiments showed this hybrid approach outperformed other motion planning techniques on challenging driving tasks, suggesting it could be a promising direction for building safer and more capable self-driving cars.
Technical Explanation
The paper presents a hybrid imitation-learning motion planner that combines deep reinforcement learning and behavior cloning to generate natural and safe driving behaviors for autonomous vehicles in urban environments.
The motion planner architecture consists of several key components:
- A perception module that processes sensor data to estimate the state of the vehicle and its surroundings.
- A behavior planning module that selects high-level driving behaviors based on the current state.
- A motion planning module that generates smooth, collision-free trajectories to execute the selected behaviors.
The behavior planning module uses a combination of behavior cloning and deep reinforcement learning. Behavior cloning learns to mimic expert human driving behaviors, while reinforcement learning allows the system to explore different strategies and learn optimal behaviors through trial-and-error.
The motion planning module generates trajectories by optimizing a cost function that considers factors like obstacle avoidance, comfort, and progress towards the goal.
Experiments on challenging urban driving tasks demonstrate that the hybrid planner outperforms prior motion planning approaches in terms of safety, efficiency, and naturalness of the generated behaviors.
Critical Analysis
The paper acknowledges several limitations of the proposed approach:
- The system relies on high-quality expert demonstrations for behavior cloning, which may not always be available.
- The reinforcement learning component requires significant training time and computational resources.
- The motion planning module assumes a simplified vehicle dynamics model, which may not capture all real-world complexities.
Additionally, the paper does not explore how the hybrid planner would perform in highly dynamic or adversarial urban environments, where other road users may behave unpredictably. Further research could investigate the system's robustness to such challenging scenarios.
Conclusion
This paper presents a promising hybrid approach to motion planning for autonomous driving in urban settings. By combining behavior cloning and reinforcement learning, the system is able to generate safe, natural, and efficient driving behaviors that outperform prior methods.
The research highlights the potential of leveraging both imitation and exploration-based learning to tackle the complex challenges of autonomous urban driving. As self-driving technologies continue to advance, this type of hybrid approach could play a crucial role in improving the safety and reliability of future autonomous vehicles.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Hybrid Imitation-Learning Motion Planner for Urban Driving
Cristian Gariboldi, Matteo Corno, Beng Jin
With the release of open source datasets such as nuPlan and Argoverse, the research around learning-based planners has spread a lot in the last years. Existing systems have shown excellent capabilities in imitating the human driver behaviour, but they struggle to guarantee safe closed-loop driving. Conversely, optimization-based planners offer greater security in short-term planning scenarios. To confront this challenge, in this paper we propose a novel hybrid motion planner that integrates both learning-based and optimization-based techniques. Initially, a multilayer perceptron (MLP) generates a human-like trajectory, which is then refined by an optimization-based component. This component not only minimizes tracking errors but also computes a trajectory that is both kinematically feasible and collision-free with obstacles and road boundaries. Our model effectively balances safety and human-likeness, mitigating the trade-off inherent in these objectives. We validate our approach through simulation experiments and further demonstrate its efficacy by deploying it in real-world self-driving vehicles.
Read more9/5/2024

0
Planning with Adaptive World Models for Autonomous Driving
Arun Balajee Vasudevan, Neehar Peri, Jeff Schneider, Deva Ramanan
Motion planning is crucial for safe navigation in complex urban environments. Historically, motion planners (MPs) have been evaluated with procedurally-generated simulators like CARLA. However, such synthetic benchmarks do not capture real-world multi-agent interactions. nuPlan, a recently released MP benchmark, addresses this limitation by augmenting real-world driving logs with closed-loop simulation logic, effectively turning the fixed dataset into a reactive simulator. We analyze the characteristics of nuPlan's recorded logs and find that each city has its own unique driving behaviors, suggesting that robust planners must adapt to different environments. We learn to model such unique behaviors with BehaviorNet, a graph convolutional neural network (GCNN) that predicts reactive agent behaviors using features derived from recently-observed agent histories; intuitively, some aggressive agents may tailgate lead vehicles, while others may not. To model such phenomena, BehaviorNet predicts parameters of an agent's motion controller rather than predicting its spacetime trajectory (as most forecasters do). Finally, we present AdaptiveDriver, a model-predictive control (MPC) based planner that unrolls different world models conditioned on BehaviorNet's predictions. Our extensive experiments demonstrate that AdaptiveDriver achieves state-of-the-art results on the nuPlan closed-loop planning benchmark, reducing test error from 6.4% to 4.6%, even when applied to never-before-seen cities.
Read more6/18/2024
0
Motion planning for off-road autonomous driving based on human-like cognition and weight adaptation
Yuchun Wang, Cheng Gong, Jianwei Gong, Peng Jia
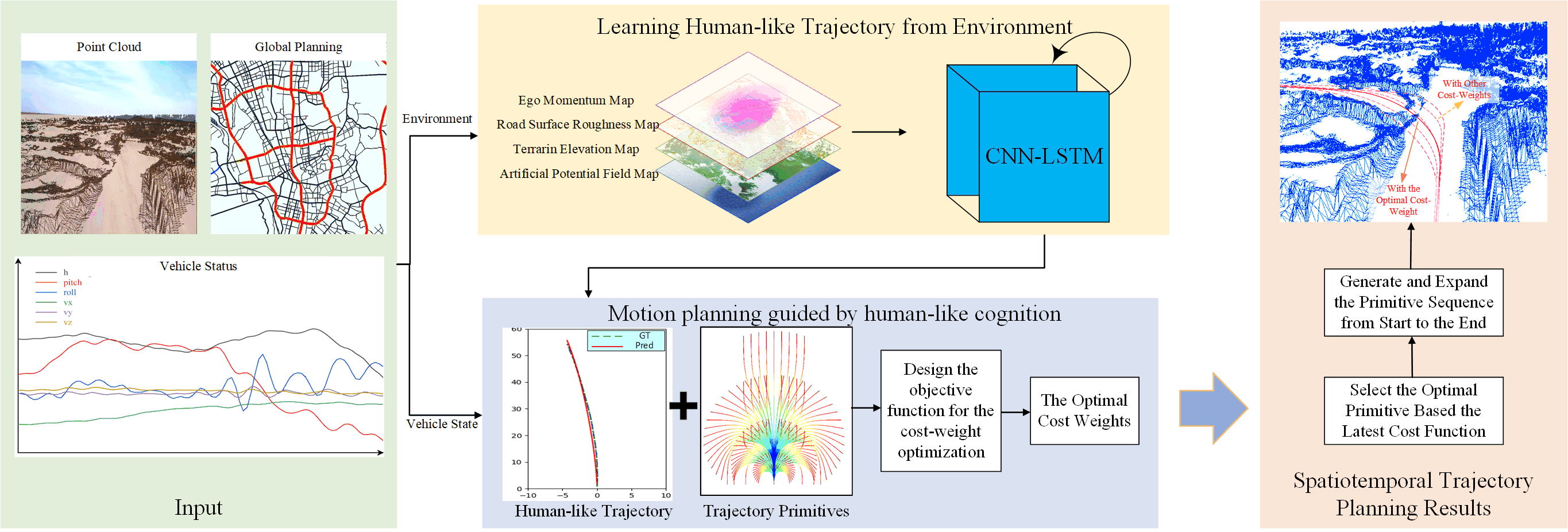
Driving in an off-road environment is challenging for autonomous vehicles due to the complex and varied terrain. To ensure stable and efficient travel, the vehicle requires consideration and balancing of environmental factors, such as undulations, roughness, and obstacles, to generate optimal trajectories that can adapt to changing scenarios. However, traditional motion planners often utilize a fixed cost function for trajectory optimization, making it difficult to adapt to different driving strategies in challenging irregular terrains and uncommon scenarios. To address these issues, we propose an adaptive motion planner based on human-like cognition and cost evaluation for off-road driving. First, we construct a multi-layer map describing different features of off-road terrains, including terrain elevation, roughness, obstacle, and artificial potential field map. Subsequently, we employ a CNN-LSTM network to learn the trajectories planned by human drivers in various off-road scenarios. Then, based on human-like generated trajectories in different environments, we design a primitive-based trajectory planner that aims to mimic human trajectories and cost weight selection, generating trajectories that are consistent with the dynamics of off-road vehicles. Finally, we compute optimal cost weights and select and extend behavioral primitives to generate highly adaptive, stable, and efficient trajectories. We validate the effectiveness of the proposed method through experiments in a desert off-road environment with complex terrain and varying road conditions. The experimental results show that the proposed human-like motion planner has excellent adaptability to different off-road conditions. It shows real-time operation, greater stability, and more human-like planning ability in diverse and challenging scenarios.
Read more4/30/2024

0
Can Vehicle Motion Planning Generalize to Realistic Long-tail Scenarios?
Marcel Hallgarten, Julian Zapata, Martin Stoll, Katrin Renz, Andreas Zell
Real-world autonomous driving systems must make safe decisions in the face of rare and diverse traffic scenarios. Current state-of-the-art planners are mostly evaluated on real-world datasets like nuScenes (open-loop) or nuPlan (closed-loop). In particular, nuPlan seems to be an expressive evaluation method since it is based on real-world data and closed-loop, yet it mostly covers basic driving scenarios. This makes it difficult to judge a planner's capabilities to generalize to rarely-seen situations. Therefore, we propose a novel closed-loop benchmark interPlan containing several edge cases and challenging driving scenarios. We assess existing state-of-the-art planners on our benchmark and show that neither rule-based nor learning-based planners can safely navigate the interPlan scenarios. A recently evolving direction is the usage of foundation models like large language models (LLM) to handle generalization. We evaluate an LLM-only planner and introduce a novel hybrid planner that combines an LLM-based behavior planner with a rule-based motion planner that achieves state-of-the-art performance on our benchmark.
Read more9/5/2024