Unified Control Framework for Real-Time Interception and Obstacle Avoidance of Fast-Moving Objects with Diffusion Variational Autoencoder
2209.13628
0
0
📈
Abstract
Real-time interception of fast-moving objects by robotic arms in dynamic environments poses a formidable challenge due to the need for rapid reaction times, often within milliseconds, amidst dynamic obstacles. This paper introduces a unified control framework to address the above challenge by simultaneously intercepting dynamic objects and avoiding moving obstacles. Central to our approach is using diffusion-based variational autoencoder for motion planning to perform both object interception and obstacle avoidance. We begin by encoding the high-dimensional temporal information from streaming events into a two-dimensional latent manifold, enabling the discrimination between safe and colliding trajectories, culminating in the construction of an offline densely connected trajectory graph. Subsequently, we employ an extended Kalman filter to achieve precise real-time tracking of the moving object. Leveraging a graph-traversing strategy on the established offline dense graph, we generate encoded robotic motor control commands. Finally, we decode these commands to enable real-time motion of robotic motors, ensuring effective obstacle avoidance and high interception accuracy of fast-moving objects. Experimental validation on both computer simulations and autonomous 7-DoF robotic arms demonstrates the efficacy of our proposed framework. Results indicate the capability of the robotic manipulator to navigate around multiple obstacles of varying sizes and shapes while successfully intercepting fast-moving objects thrown from different angles by hand. Complete video demonstrations of our experiments can be found in https://sites.google.com/view/multirobotskill/home.
Create account to get full access
Overview
- Intercepting fast-moving objects in dynamic environments is a challenging task for robotic arms due to the need for rapid reaction times and obstacle avoidance.
- The paper introduces a unified control framework to address this challenge by simultaneously intercepting dynamic objects and avoiding moving obstacles.
- The approach uses a diffusion-based variational autoencoder for motion planning, an extended Kalman filter for real-time object tracking, and a graph-traversing strategy for generating robot control commands.
- Experiments on computer simulations and autonomous 7-DoF robotic arms demonstrate the effectiveness of the proposed framework.
Plain English Explanation
Imagine you have a robotic arm that needs to catch a fast-moving ball or other object, but it also has to navigate around obstacles that are moving around. This is a really tricky problem because the robot needs to react incredibly quickly, often in just a few milliseconds, to successfully catch the object without running into the obstacles.
The researchers in this paper came up with a way to address this challenge. They use a special kind of machine learning model called a variational autoencoder to analyze the high-dimensional information from the sensors on the robot. This allows the robot to quickly figure out which paths are safe and which ones will lead to collisions. The researchers also use a Kalman filter, which is a type of algorithm that can accurately track the moving object in real-time.
By combining these techniques, the researchers were able to get the robot to successfully intercept fast-moving objects while navigating around various obstacles. They tested their system in computer simulations as well as with a real 7-joint robotic arm, and the results showed that the robot could catch objects thrown from different angles while avoiding collisions with the obstacles.
Technical Explanation
The core of the researchers' approach is a diffusion-based variational autoencoder (DVAE) that is used for motion planning. The DVAE takes in the high-dimensional sensor data from the robot and encodes it into a lower-dimensional 2D representation. This allows the system to distinguish between safe and colliding trajectories, which are then used to construct an offline dense trajectory graph.
An extended Kalman filter is employed to precisely track the moving object in real-time. This information is then used in conjunction with the pre-built trajectory graph to generate the appropriate motor control commands for the robot. These encoded commands are then decoded to enable the actual real-time motion of the robotic arm, ensuring effective obstacle avoidance and accurate interception of the fast-moving object.
The researchers validated their framework through both computer simulations and experiments with an autonomous 7-DoF robotic arm. The results demonstrate the robot's capability to navigate around multiple obstacles of varying sizes and shapes while successfully intercepting objects thrown from different angles.
Critical Analysis
The paper provides a comprehensive and technically detailed solution to the challenging problem of real-time interception of fast-moving objects in dynamic environments. The use of the DVAE for motion planning and the extended Kalman filter for object tracking are well-justified and appear to be effective based on the experimental results.
One potential limitation is the reliance on an offline, pre-built trajectory graph. While this approach enables efficient real-time decision-making, it may not be as flexible in handling completely novel or highly complex environments. Additionally, the paper does not discuss the computational requirements or the scalability of the proposed framework, which could be important considerations for real-world deployment.
Further research could explore the integration of more adaptive motion planning techniques, such as those based on reinforcement learning or other online optimization methods. Investigating the robustness of the system to sensor noise, object occlusion, and other real-world factors would also be valuable.
Conclusion
The researchers have presented a promising framework for addressing the challenging problem of real-time interception of fast-moving objects in dynamic environments. By combining advanced motion planning, object tracking, and control techniques, their system demonstrates the ability to successfully navigate around obstacles while accurately intercepting thrown objects.
The practical implications of this research could be significant, as it could enable the development of more capable robotic systems for applications such as sports, manufacturing, and emergency response. The researchers' work highlights the potential of integrating cutting-edge machine learning and control algorithms to tackle complex real-world robotics challenges.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
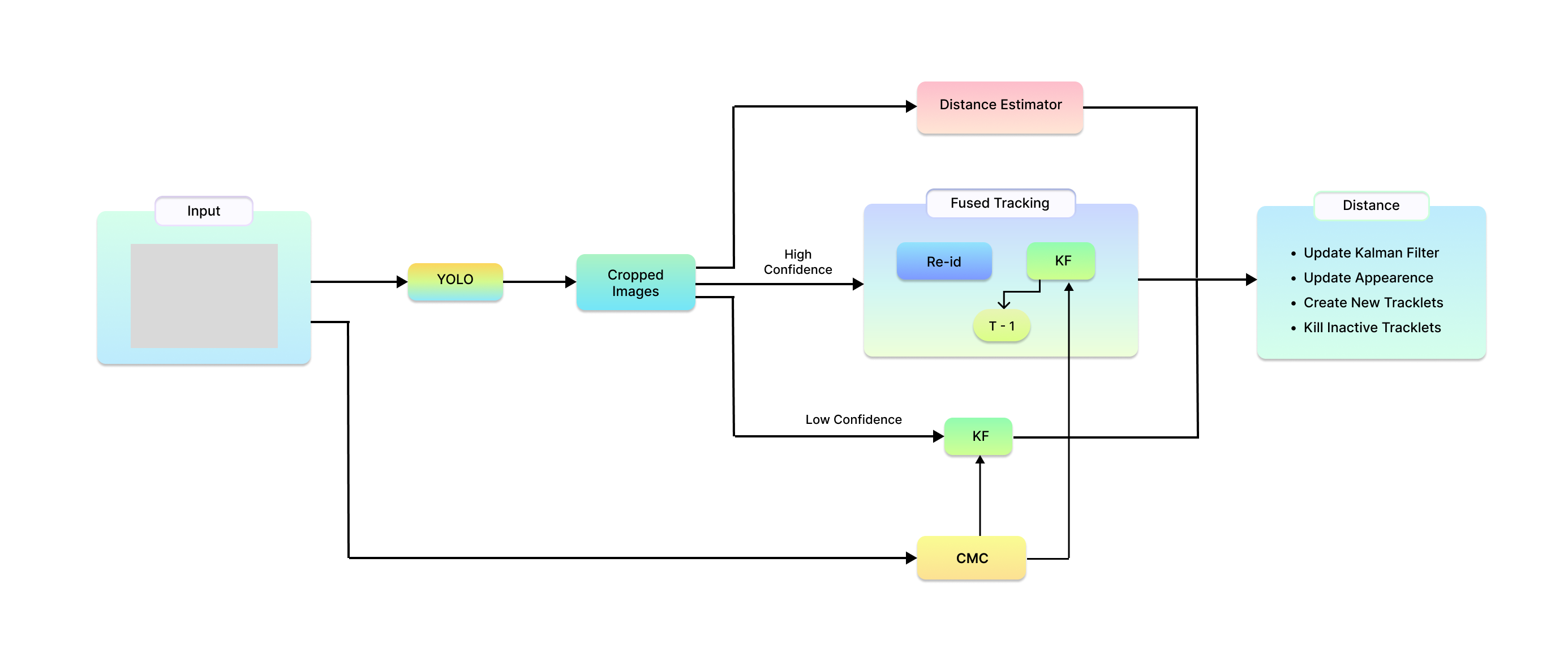
Ensuring UAV Safety: A Vision-only and Real-time Framework for Collision Avoidance Through Object Detection, Tracking, and Distance Estimation
Vasileios Karampinis, Anastasios Arsenos, Orfeas Filippopoulos, Evangelos Petrongonas, Christos Skliros, Dimitrios Kollias, Stefanos Kollias, Athanasios Voulodimos
0
0
In the last twenty years, unmanned aerial vehicles (UAVs) have garnered growing interest due to their expanding applications in both military and civilian domains. Detecting non-cooperative aerial vehicles with efficiency and estimating collisions accurately are pivotal for achieving fully autonomous aircraft and facilitating Advanced Air Mobility (AAM). This paper presents a deep-learning framework that utilizes optical sensors for the detection, tracking, and distance estimation of non-cooperative aerial vehicles. In implementing this comprehensive sensing framework, the availability of depth information is essential for enabling autonomous aerial vehicles to perceive and navigate around obstacles. In this work, we propose a method for estimating the distance information of a detected aerial object in real time using only the input of a monocular camera. In order to train our deep learning components for the object detection, tracking and depth estimation tasks we utilize the Amazon Airborne Object Tracking (AOT) Dataset. In contrast to previous approaches that integrate the depth estimation module into the object detector, our method formulates the problem as image-to-image translation. We employ a separate lightweight encoder-decoder network for efficient and robust depth estimation. In a nutshell, the object detection module identifies and localizes obstacles, conveying this information to both the tracking module for monitoring obstacle movement and the depth estimation module for calculating distances. Our approach is evaluated on the Airborne Object Tracking (AOT) dataset which is the largest (to the best of our knowledge) air-to-air airborne object dataset.
5/17/2024
QuAD: Query-based Interpretable Neural Motion Planning for Autonomous Driving
Sourav Biswas, Sergio Casas, Quinlan Sykora, Ben Agro, Abbas Sadat, Raquel Urtasun
0
0
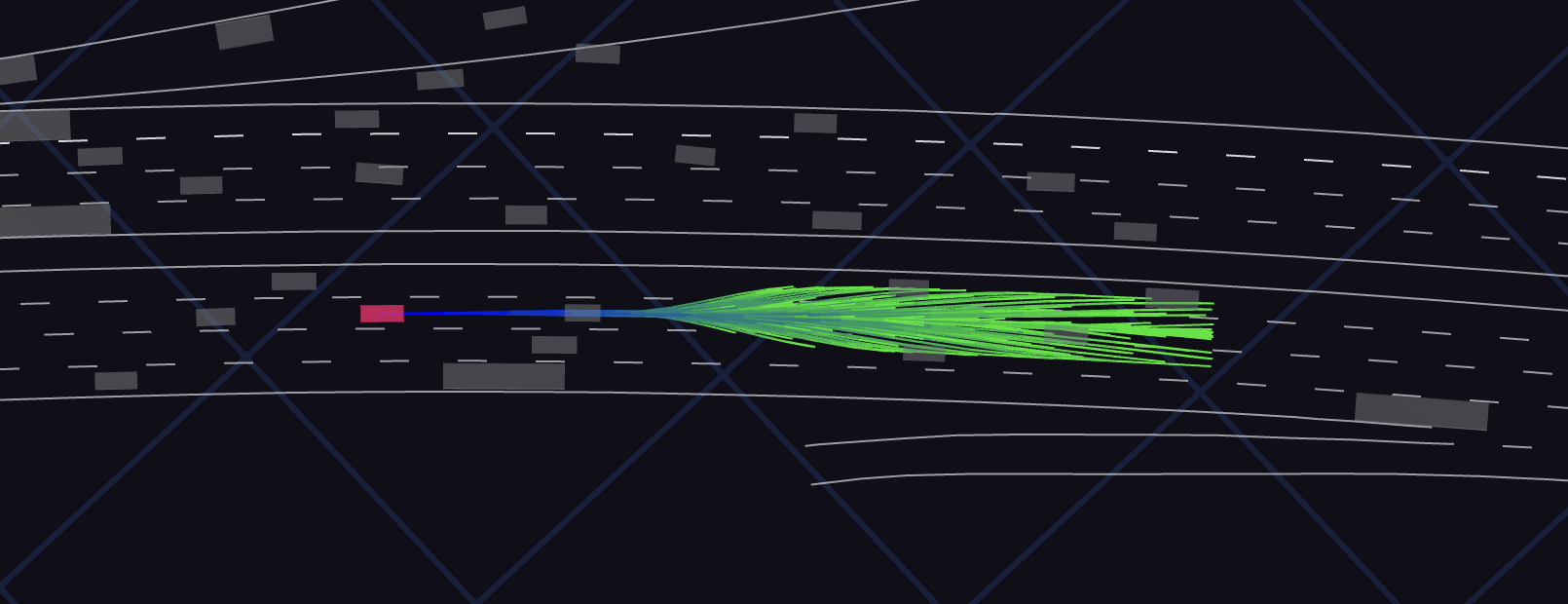
A self-driving vehicle must understand its environment to determine the appropriate action. Traditional autonomy systems rely on object detection to find the agents in the scene. However, object detection assumes a discrete set of objects and loses information about uncertainty, so any errors compound when predicting the future behavior of those agents. Alternatively, dense occupancy grid maps have been utilized to understand free-space. However, predicting a grid for the entire scene is wasteful since only certain spatio-temporal regions are reachable and relevant to the self-driving vehicle. We present a unified, interpretable, and efficient autonomy framework that moves away from cascading modules that first perceive, then predict, and finally plan. Instead, we shift the paradigm to have the planner query occupancy at relevant spatio-temporal points, restricting the computation to those regions of interest. Exploiting this representation, we evaluate candidate trajectories around key factors such as collision avoidance, comfort, and progress for safety and interpretability. Our approach achieves better highway driving quality than the state-of-the-art in high-fidelity closed-loop simulations.
4/3/2024

Real-time Motion Planning for autonomous vehicles in dynamic environments
Mohammad Dehghani Tezerjani, Dominic Carrillo, Deyuan Qu, Sudip Dhakal, Amir Mirzaeinia, Qing Yang
0
0
Recent advancements in self-driving car technologies have enabled them to navigate autonomously through various environments. However, one of the critical challenges in autonomous vehicle operation is trajectory planning, especially in dynamic environments with moving obstacles. This research aims to tackle this challenge by proposing a robust algorithm tailored for autonomous cars operating in dynamic environments with moving obstacles. The algorithm introduces two main innovations. Firstly, it defines path density by adjusting the number of waypoints along the trajectory, optimizing their distribution for accuracy in curved areas and reducing computational complexity in straight sections. Secondly, it integrates hierarchical motion planning algorithms, combining global planning with an enhanced $A^*$ graph-based method and local planning using the time elastic band algorithm with moving obstacle detection considering different motion models. The proposed algorithm is adaptable for different vehicle types and mobile robots, making it versatile for real-world applications. Simulation results demonstrate its effectiveness across various conditions, promising safer and more efficient navigation for autonomous vehicles in dynamic environments. These modifications significantly improve trajectory planning capabilities, addressing a crucial aspect of autonomous vehicle technology.
6/6/2024

Enhanced Automotive Object Detection via RGB-D Fusion in a DiffusionDet Framework
Eliraz Orfaig, Inna Stainvas, Igal Bilik
0
0
Vision-based autonomous driving requires reliable and efficient object detection. This work proposes a DiffusionDet-based framework that exploits data fusion from the monocular camera and depth sensor to provide the RGB and depth (RGB-D) data. Within this framework, ground truth bounding boxes are randomly reshaped as part of the training phase, allowing the model to learn the reverse diffusion process of noise addition. The system methodically enhances a randomly generated set of boxes at the inference stage, guiding them toward accurate final detections. By integrating the textural and color features from RGB images with the spatial depth information from the LiDAR sensors, the proposed framework employs a feature fusion that substantially enhances object detection of automotive targets. The $2.3$ AP gain in detecting automotive targets is achieved through comprehensive experiments using the KITTI dataset. Specifically, the improved performance of the proposed approach in detecting small objects is demonstrated.
6/6/2024