NGD-SLAM: Towards Real-Time SLAM for Dynamic Environments without GPU

0
👀
Sign in to get full access
Overview
- Tackles the challenge of accurate and robust camera tracking in dynamic environments for visual SLAM
- Proposes a novel SLAM system that achieves real-time performance on a CPU by incorporating a parallel mask prediction mechanism and a dual-stage optical flow tracking approach
- Combines optical flow and ORB features to enhance efficiency and robustness
- Maintains high localization accuracy in dynamic environments while achieving a high tracking frame rate of 56 fps on a single laptop CPU without any hardware acceleration
Plain English Explanation
The research paper addresses a significant challenge in the field of visual SLAM (Simultaneous Localization and Mapping): accurately tracking a camera's position and orientation in environments with moving objects. Traditional SLAM techniques often struggle with this, as they can't easily distinguish between static and dynamic elements in the scene.
The researchers developed a new SLAM system that solves this problem by incorporating a "mask prediction" mechanism. This allows the deep learning-based object detection and the camera tracking to run independently, without one process having to wait for the other. This parallel processing approach enables the system to run in real-time on a standard CPU, without needing expensive GPU hardware.
Additionally, the system uses a hybrid approach that combines optical flow tracking and ORB feature tracking. Optical flow is good at detecting motion, while ORB features provide more stable landmarks for the SLAM system to track. By using both, the system can efficiently and robustly track the camera's movement, even in dynamic environments with lots of moving objects.
Compared to other state-of-the-art SLAM systems, this new approach maintains high accuracy in tracking the camera's position and orientation, while also achieving an impressive frame rate of 56 frames per second on a regular laptop CPU. This shows that deep learning-based methods for dynamic SLAM are feasible even without specialized hardware acceleration.
Technical Explanation
The paper proposes a novel visual SLAM system for dynamic environments that obtains real-time performance on a CPU. It incorporates a mask prediction mechanism that allows the deep learning-based object detection and the camera tracking to run in parallel at different frequencies, without one process having to wait for the other.
Building on this parallel processing approach, the system further introduces a dual-stage optical flow tracking approach and employs a hybrid usage of optical flow and ORB features. This significantly enhances the efficiency and robustness of the system, as optical flow is good at detecting motion, while ORB features provide more stable landmarks for the SLAM system to track.
Compared to state-of-the-art methods, GS-SLAM, and MGS-SLAM, the proposed system maintains high localization accuracy in dynamic environments while achieving a tracking frame rate of 56 fps on a single laptop CPU without any hardware acceleration. This demonstrates that deep learning-based methods for dynamic SLAM are still feasible even without GPU support.
Critical Analysis
The paper presents a promising approach to addressing the challenges of camera tracking in dynamic environments for visual SLAM. The parallel processing architecture and the hybrid optical flow/ORB feature tracking represent innovative solutions that help overcome the limitations of previous methods.
However, the paper does not provide a detailed analysis of the system's performance in more complex or extreme dynamic environments. It would be valuable to understand how the system handles scenarios with a higher density of moving objects, occlusions, or rapid camera movements.
Additionally, the paper could have explored the trade-offs between the system's accuracy, robustness, and computational efficiency in more depth. It would be interesting to see how the different components of the system (e.g., the mask prediction, the dual-stage optical flow, the feature combination) contribute to its overall performance and under what conditions certain trade-offs might be necessary.
Further research could also investigate the system's generalization to different types of environments, sensors, or hardware configurations. Exploring the potential for further optimizations or adaptations to resource-constrained devices would also be a valuable next step.
Conclusion
The proposed SLAM system represents a significant advancement in the field of visual SLAM for dynamic environments. By incorporating a parallel mask prediction mechanism and a hybrid optical flow/ORB feature tracking approach, the system achieves real-time performance on a standard CPU without the need for specialized hardware acceleration.
This work demonstrates that deep learning-based methods for dynamic SLAM can be feasible even in resource-constrained settings, opening up new possibilities for the deployment of robust and efficient visual SLAM systems in a wide range of applications, from robotics and augmented reality to autonomous vehicles and beyond.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
👀
0
NGD-SLAM: Towards Real-Time SLAM for Dynamic Environments without GPU
Yuhao Zhang, Mihai Bujanca, Mikel Luj'an
Existing SLAM (Simultaneous Localization and Mapping) algorithms have achieved remarkable localization accuracy in dynamic environments by using deep learning techniques to identify dynamic objects. However, they usually require GPUs to operate in real-time. Therefore, this paper proposes an open-source real-time dynamic SLAM system that runs solely on CPU by incorporating a mask prediction mechanism, which allows the deep learning method and the camera tracking to run entirely in parallel at different frequencies. Our SLAM system further introduces a dual-stage optical flow tracking approach and employs a hybrid usage of optical flow and ORB features, enhancing efficiency and robustness by selectively allocating computational resources to input frames. Compared with previous methods, our system maintains high localization accuracy in dynamic environments while achieving a tracking frame rate of 56 FPS on a laptop CPU, proving that deep learning methods are feasible for dynamic SLAM without GPU support. To the best of our knowledge, this is the first SLAM system to achieve this.
Read more9/17/2024

0
Photo-SLAM: Real-time Simultaneous Localization and Photorealistic Mapping for Monocular, Stereo, and RGB-D Cameras
Huajian Huang, Longwei Li, Hui Cheng, Sai-Kit Yeung
The integration of neural rendering and the SLAM system recently showed promising results in joint localization and photorealistic view reconstruction. However, existing methods, fully relying on implicit representations, are so resource-hungry that they cannot run on portable devices, which deviates from the original intention of SLAM. In this paper, we present Photo-SLAM, a novel SLAM framework with a hyper primitives map. Specifically, we simultaneously exploit explicit geometric features for localization and learn implicit photometric features to represent the texture information of the observed environment. In addition to actively densifying hyper primitives based on geometric features, we further introduce a Gaussian-Pyramid-based training method to progressively learn multi-level features, enhancing photorealistic mapping performance. The extensive experiments with monocular, stereo, and RGB-D datasets prove that our proposed system Photo-SLAM significantly outperforms current state-of-the-art SLAM systems for online photorealistic mapping, e.g., PSNR is 30% higher and rendering speed is hundreds of times faster in the Replica dataset. Moreover, the Photo-SLAM can run at real-time speed using an embedded platform such as Jetson AGX Orin, showing the potential of robotics applications.
Read more4/9/2024
0
RoDyn-SLAM: Robust Dynamic Dense RGB-D SLAM with Neural Radiance Fields
Haochen Jiang, Yueming Xu, Kejie Li, Jianfeng Feng, Li Zhang
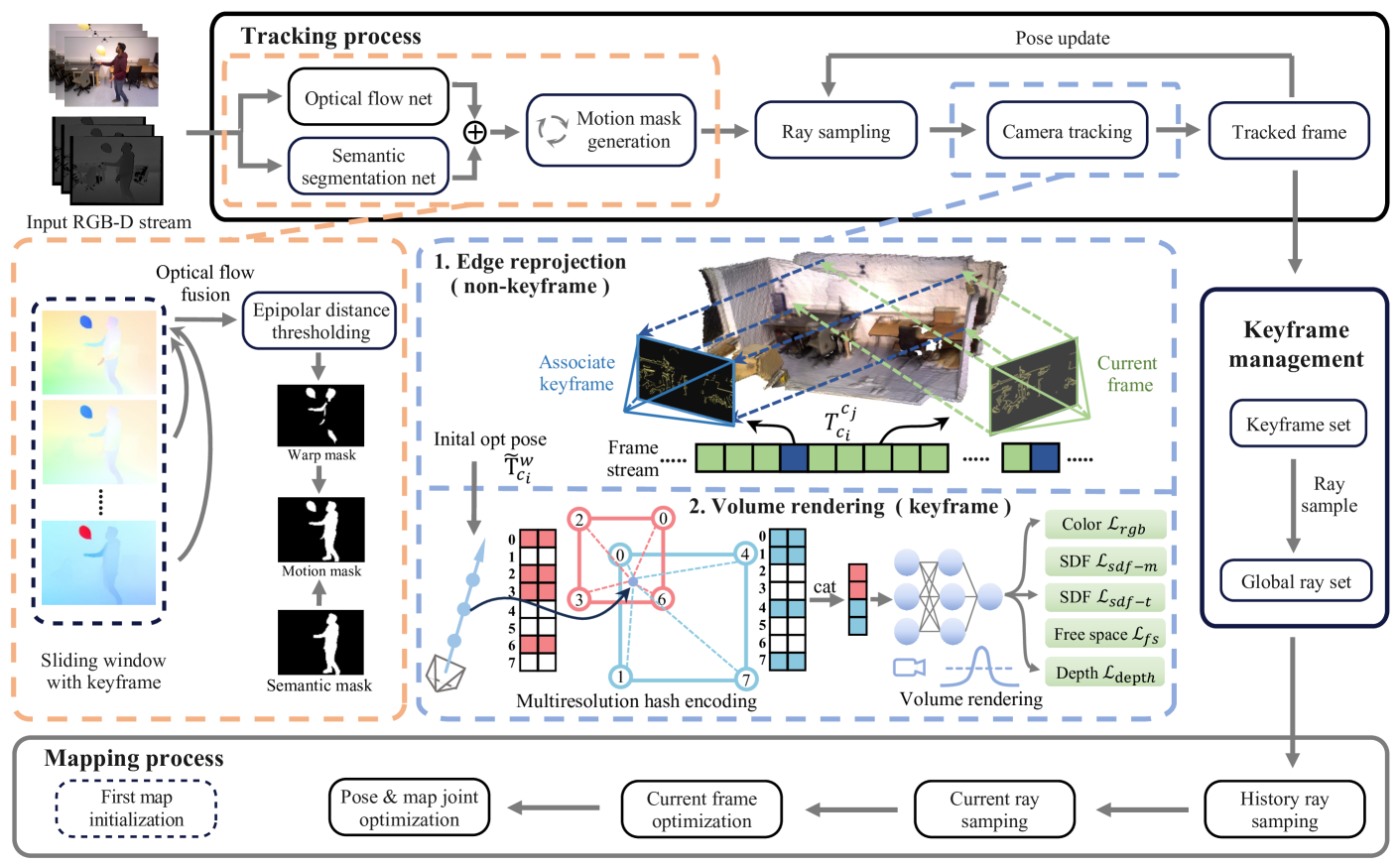
Leveraging neural implicit representation to conduct dense RGB-D SLAM has been studied in recent years. However, this approach relies on a static environment assumption and does not work robustly within a dynamic environment due to the inconsistent observation of geometry and photometry. To address the challenges presented in dynamic environments, we propose a novel dynamic SLAM framework with neural radiance field. Specifically, we introduce a motion mask generation method to filter out the invalid sampled rays. This design effectively fuses the optical flow mask and semantic mask to enhance the precision of motion mask. To further improve the accuracy of pose estimation, we have designed a divide-and-conquer pose optimization algorithm that distinguishes between keyframes and non-keyframes. The proposed edge warp loss can effectively enhance the geometry constraints between adjacent frames. Extensive experiments are conducted on the two challenging datasets, and the results show that RoDyn-SLAM achieves state-of-the-art performance among recent neural RGB-D methods in both accuracy and robustness.
Read more7/2/2024

0
NID-SLAM: Neural Implicit Representation-based RGB-D SLAM in dynamic environments
Ziheng Xu, Jianwei Niu, Qingfeng Li, Tao Ren, Chen Chen
Neural implicit representations have been explored to enhance visual SLAM algorithms, especially in providing high-fidelity dense map. Existing methods operate robustly in static scenes but struggle with the disruption caused by moving objects. In this paper we present NID-SLAM, which significantly improves the performance of neural SLAM in dynamic environments. We propose a new approach to enhance inaccurate regions in semantic masks, particularly in marginal areas. Utilizing the geometric information present in depth images, this method enables accurate removal of dynamic objects, thereby reducing the probability of camera drift. Additionally, we introduce a keyframe selection strategy for dynamic scenes, which enhances camera tracking robustness against large-scale objects and improves the efficiency of mapping. Experiments on publicly available RGB-D datasets demonstrate that our method outperforms competitive neural SLAM approaches in tracking accuracy and mapping quality in dynamic environments.
Read more5/17/2024