Octo-planner: On-device Language Model for Planner-Action Agents

0
Sign in to get full access
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Octo-planner: On-device Language Model for Planner-Action Agents
Wei Chen, Zhiyuan Li, Zhen Guo, Yikang Shen
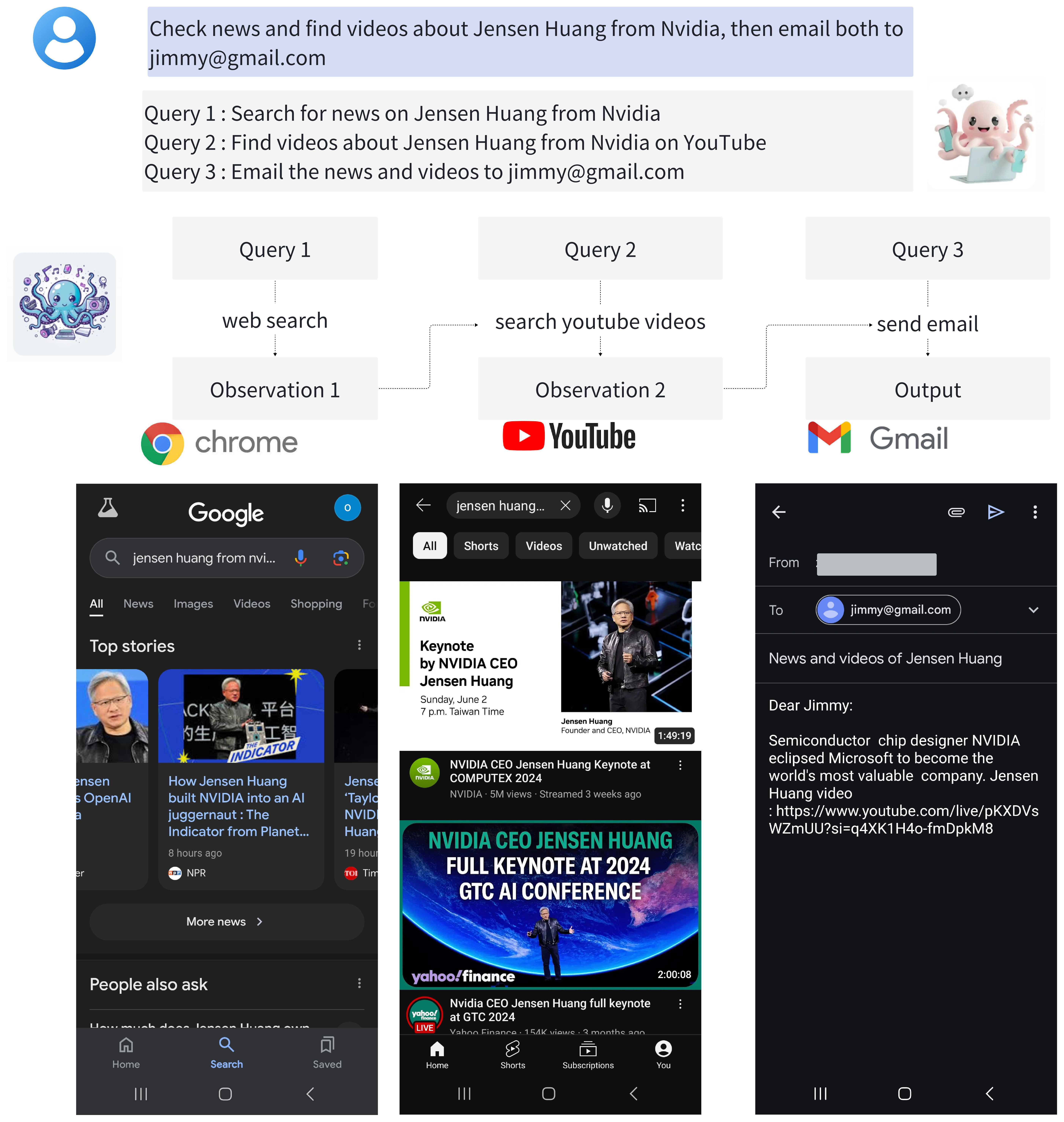
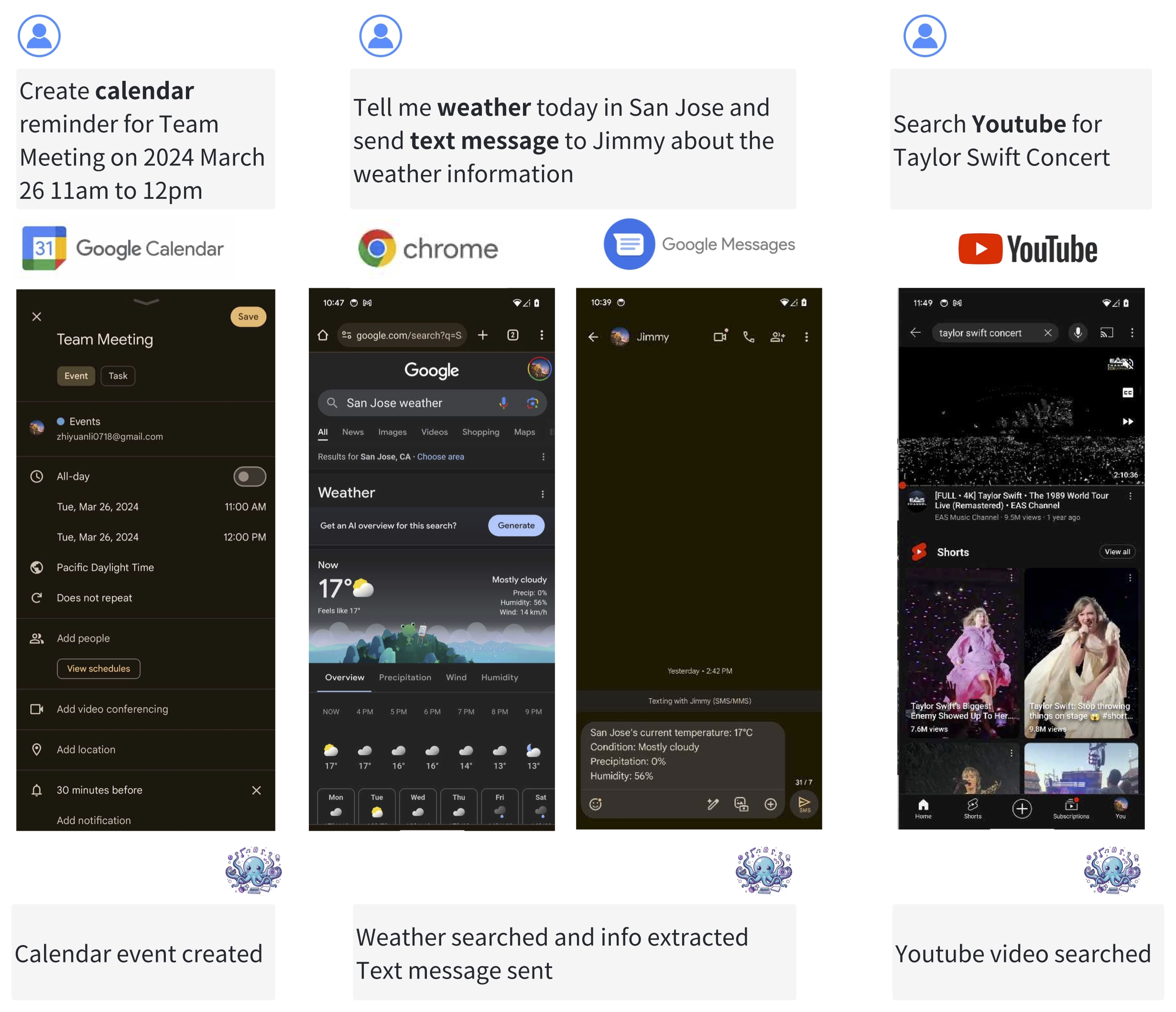
AI agents have become increasingly significant in various domains, enabling autonomous decision-making and problem-solving. To function effectively, these agents require a planning process that determines the best course of action and then executes the planned actions. In this paper, we present an efficient on-device Planner-Action framework that separates planning and action execution into two distinct components: a planner agent based on Phi-3 Mini, a 3.8 billion parameter LLM optimized for edge devices, and an action agent using the Octopus model for function execution. The planner agent first responds to user queries by decomposing tasks into a sequence of sub-steps, which are then executed by the action agent. To optimize performance on resource-constrained devices, we employ model fine-tuning instead of in-context learning, reducing computational costs and energy consumption while improving response times. Our approach involves using GPT-4 to generate diverse planning queries and responses based on available functions, with subsequent validations to ensure data quality. We fine-tune the Phi-3 Mini model on this curated dataset, achieving a 97% success rate in our in-domain test environment. To address multi-domain planning challenges, we developed a multi-LoRA training method that merges weights from LoRAs trained on distinct function subsets. This approach enables flexible handling of complex, multi-domain queries while maintaining computational efficiency on resource-constrained devices. To support further research, we have open-sourced our model weights at url{https://huggingface.co/NexaAIDev/octopus-planning}. For the demo, please refer to url{https://www.nexa4ai.com/octo-planner}.
Read more6/27/2024
64
Octopus v2: On-device language model for super agent
Wei Chen, Zhiyuan Li
Language models have shown effectiveness in a variety of software applications, particularly in tasks related to automatic workflow. These models possess the crucial ability to call functions, which is essential in creating AI agents. Despite the high performance of large-scale language models in cloud environments, they are often associated with concerns over privacy and cost. Current on-device models for function calling face issues with latency and accuracy. Our research presents a new method that empowers an on-device model with 2 billion parameters to surpass the performance of GPT-4 in both accuracy and latency, and decrease the context length by 95%. When compared to Llama-7B with a RAG-based function calling mechanism, our method enhances latency by 35-fold. This method reduces the latency to levels deemed suitable for deployment across a variety of edge devices in production environments, aligning with the performance requisites for real-world applications.
Read more4/17/2024
0
Ask-before-Plan: Proactive Language Agents for Real-World Planning
Xuan Zhang, Yang Deng, Zifeng Ren, See-Kiong Ng, Tat-Seng Chua
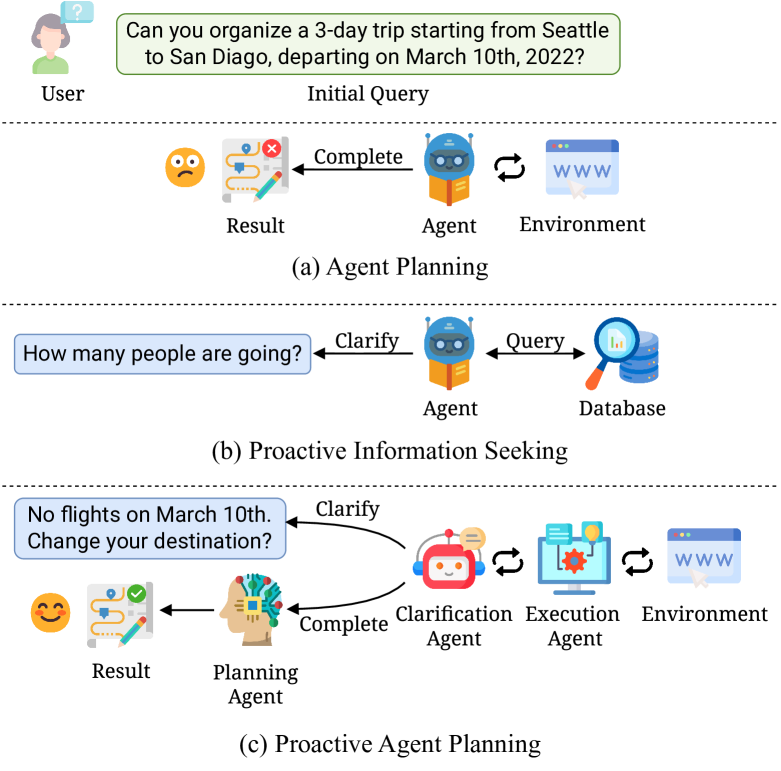
The evolution of large language models (LLMs) has enhanced the planning capabilities of language agents in diverse real-world scenarios. Despite these advancements, the potential of LLM-powered agents to comprehend ambiguous user instructions for reasoning and decision-making is still under exploration. In this work, we introduce a new task, Proactive Agent Planning, which requires language agents to predict clarification needs based on user-agent conversation and agent-environment interaction, invoke external tools to collect valid information, and generate a plan to fulfill the user's demands. To study this practical problem, we establish a new benchmark dataset, Ask-before-Plan. To tackle the deficiency of LLMs in proactive planning, we propose a novel multi-agent framework, Clarification-Execution-Planning (texttt{CEP}), which consists of three agents specialized in clarification, execution, and planning. We introduce the trajectory tuning scheme for the clarification agent and static execution agent, as well as the memory recollection mechanism for the dynamic execution agent. Extensive evaluations and comprehensive analyses conducted on the Ask-before-Plan dataset validate the effectiveness of our proposed framework.
Read more6/19/2024

0
Towards Autonomous Agents: Adaptive-planning, Reasoning, and Acting in Language Models
Yen-Che Hsiao, Abhishek Dutta
We propose a novel in-context learning algorithm for building autonomous decision-making language agents. The language agent continuously attempts to solve the same task by self-correcting each time the task fails. Our selected language agent demonstrates the ability to solve tasks in a text-based game environment. Our results show that the gemma-2-9b-it language model, using our proposed method, can successfully complete two of six tasks that failed in the first attempt. This highlights the effectiveness of our approach in enhancing the problem-solving capabilities of a single language model through self-correction, paving the way for more advanced autonomous agents. The code is publicly available at https://github.com/YenCheHsiao/AutonomousLLMAgentwithAdaptingPlanning.
Read more8/14/2024