Off-Road Autonomy Validation Using Scalable Digital Twin Simulations Within High-Performance Computing Clusters

0

Sign in to get full access
Overview
- Presents a framework for validating off-road autonomous vehicle systems using scalable digital twin simulations on high-performance computing clusters
- Aims to address the challenges of testing autonomous vehicles in real-world environments by leveraging advanced simulation capabilities
- Explores the use of high-fidelity digital twins and distributed computing to enhance the validation process
Plain English Explanation
This research paper describes a new approach for testing and validating autonomous off-road vehicles using advanced computer simulations. The researchers recognized that testing these vehicles in the real world can be extremely difficult and costly, especially when it comes to challenging environments like rugged terrain or extreme weather conditions.
To address this, the team developed a framework that creates highly detailed "digital twin" simulations of the vehicle, the environment, and the various sensors and software systems that make up the autonomous driving capabilities. These digital twins are then run on powerful high-performance computing clusters, allowing the researchers to test a wide range of scenarios and conditions in a scalable and efficient manner.
The key advantage of this approach is that it allows for much more comprehensive and rigorous testing of autonomous vehicle systems compared to real-world testing alone. By running thousands of simulations with different variables, the researchers can uncover edge cases, evaluate the system's robustness, and validate its performance across a diverse set of operating conditions. This helps to identify and address potential issues before deploying the vehicles in the real world.
Technical Explanation
The paper presents a framework for validating off-road autonomous vehicle systems using scalable digital twin simulations on high-performance computing (HPC) clusters. The researchers leveraged advanced simulation capabilities to create high-fidelity digital twins of the vehicle, the environment, and the autonomous systems. These digital twins were then deployed on HPC clusters, allowing for the execution of large-scale, parallel simulations to thoroughly test and validate the autonomous vehicle's performance.
The architecture of the system includes several key components:
- Digital Twin Generation: The researchers used physics-based modeling and sensor simulation techniques to create realistic digital twins of the vehicle, the off-road terrain, environmental conditions, and the autonomous driving software and sensors.
- Parallel Simulation Execution: The digital twin simulations were executed in parallel across the HPC cluster, leveraging the distributed computing capabilities to enhance the scalability and efficiency of the validation process.
- Data Collection and Analysis: The system captured extensive data from the simulations, including vehicle telemetry, sensor readings, and autonomous system outputs. This data was then analyzed to evaluate the performance, robustness, and edge case handling of the autonomous vehicle system.
The researchers demonstrated the effectiveness of their approach through a series of experiments, showing how the scalable digital twin simulations enabled more comprehensive testing and validation compared to traditional real-world testing methods. This included the ability to explore a wider range of environmental conditions, vehicle configurations, and edge cases, ultimately leading to improved safety and reliability of the autonomous vehicle system.
Critical Analysis
The research presented in this paper addresses a critical challenge in the development and deployment of autonomous off-road vehicles. By leveraging advanced simulation capabilities and high-performance computing resources, the proposed framework enables a more thorough and scalable validation process compared to traditional real-world testing approaches.
One key strength of this approach is its ability to uncover edge cases and rare scenarios that may be difficult or prohibitively expensive to test in the real world. The scalable nature of the digital twin simulations allows for the exploration of a much wider range of variables and conditions, increasing the chances of identifying potential issues or vulnerabilities in the autonomous vehicle system.
However, the paper does acknowledge some limitations and areas for further research. For example, the researchers note that the fidelity and accuracy of the digital twin simulations are critical to their effectiveness, and ongoing work is needed to improve the modeling and simulation of complex real-world phenomena. Additionally, the integration of the digital twin framework with data-driven approaches for data collection and analysis could further enhance the validation process.
Another potential concern is the potential computational and resource demands of running large-scale digital twin simulations on HPC clusters. While the researchers demonstrate the scalability of their approach, the practical deployment and adoption of such a framework may be limited by access to the necessary computing infrastructure, particularly for smaller organizations or research teams.
Overall, the research presented in this paper represents a significant step forward in the validation of autonomous off-road vehicle systems, addressing a critical challenge in the field. The continued development and refinement of this framework, combined with advancements in simulation techniques and distributed computing capabilities, could lead to significant improvements in the safety and reliability of autonomous vehicles operating in complex, off-road environments.
Conclusion
This research paper proposes a framework for validating off-road autonomous vehicle systems using scalable digital twin simulations on high-performance computing clusters. By creating highly detailed digital twins of the vehicle, environment, and autonomous systems, the researchers were able to conduct comprehensive testing and validation in a simulated setting, addressing the challenges of real-world testing in complex off-road environments.
The key innovations of this approach include the use of advanced simulation techniques to enhance the fidelity and realism of the digital twins, as well as the leveraging of distributed computing resources to enable the execution of large-scale, parallel simulations. This allows for a more thorough exploration of edge cases, evaluation of system robustness, and validation of autonomous vehicle performance across a diverse set of operating conditions.
The research presented in this paper represents an important step forward in the development and deployment of safe and reliable autonomous off-road vehicles. By combining the power of digital twin simulations with high-performance computing resources, the proposed framework offers a scalable and efficient solution for validating these complex systems, ultimately contributing to the advancement of autonomous mobility in challenging environments.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Off-Road Autonomy Validation Using Scalable Digital Twin Simulations Within High-Performance Computing Clusters
Tanmay Vilas Samak, Chinmay Vilas Samak, Joey Binz, Jonathon Smereka, Mark Brudnak, David Gorsich, Feng Luo, Venkat Krovi
Off-road autonomy validation presents unique challenges due to the unpredictable and dynamic nature of off-road environments. Traditional methods focusing on sequentially sweeping across the parameter space for variability analysis struggle to comprehensively assess the performance and safety of off-road autonomous systems within the imposed time constraints. This paper proposes leveraging scalable digital twin simulations within high-performance computing (HPC) clusters to address this challenge. By harnessing the computational power of HPC clusters, our approach aims to provide a scalable and efficient means to validate off-road autonomy algorithms, enabling rapid iteration and testing of autonomy algorithms under various conditions. We demonstrate the effectiveness of our framework through performance evaluations of the HPC cluster in terms of simulation parallelization and present the systematic variability analysis of a candidate off-road autonomy algorithm to identify potential vulnerabilities in the autonomy stack's perception, planning and control modules.
Read more6/6/2024
0
Towards Validation of Autonomous Vehicles Across Scales using an Integrated Digital Twin Framework
Tanmay Vilas Samak, Chinmay Vilas Samak, Venkat Narayan Krovi
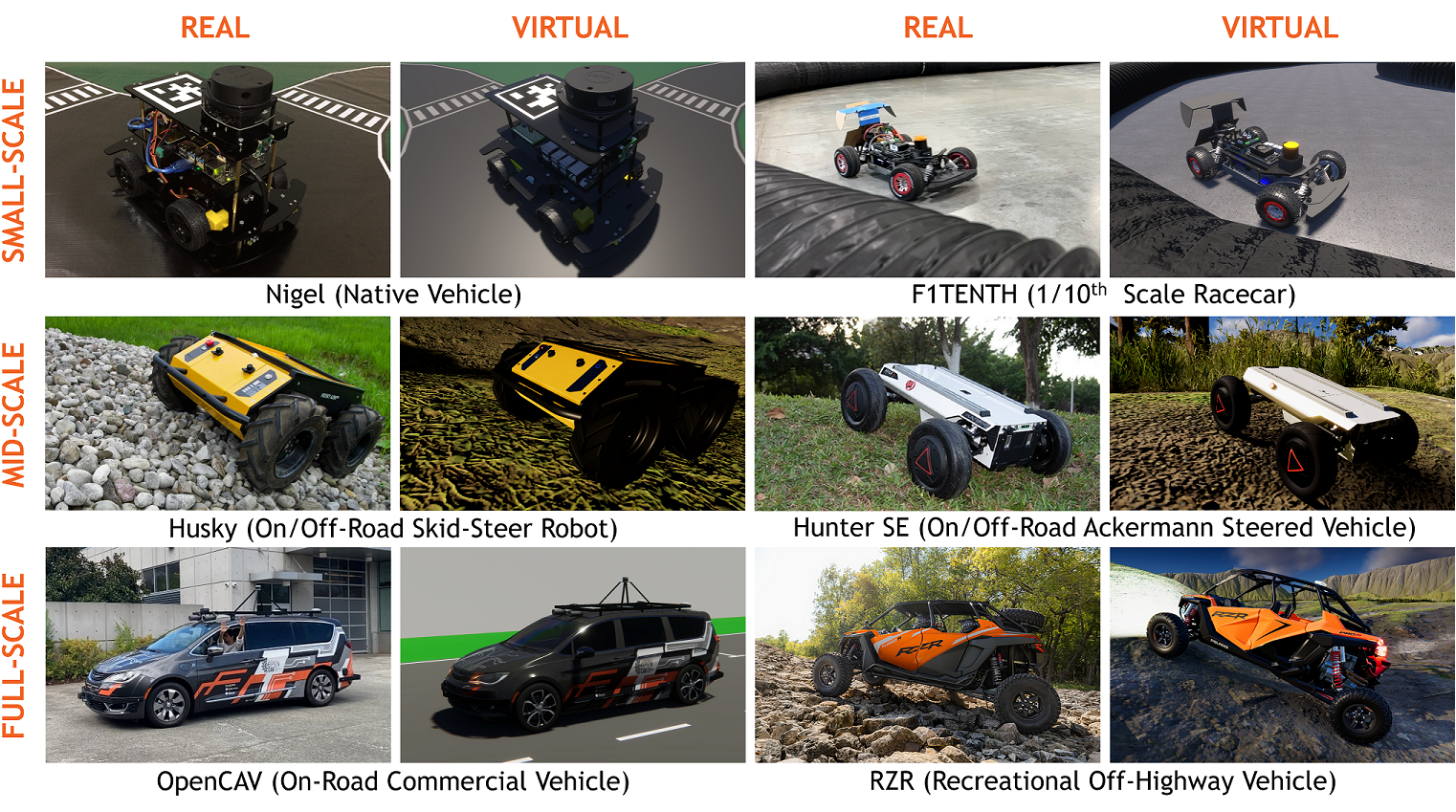
Autonomous vehicle platforms of varying spatial scales are employed within the research and development spectrum based on space, safety and monetary constraints. However, deploying and validating autonomy algorithms across varying operational scales presents challenges due to scale-specific dynamics, sensor integration complexities, computational constraints, regulatory considerations, environmental variability, interaction with other traffic participants and scalability concerns. In such a milieu, this work focuses on developing a unified framework for modeling and simulating digital twins of autonomous vehicle platforms across different scales and operational design domains (ODDs) to help support the streamlined development and validation of autonomy software stacks. Particularly, this work discusses the development of digital twin representations of 4 autonomous ground vehicles, which span across 3 different scales and target 3 distinct ODDs. We study the adoption of these autonomy-oriented digital twins to deploy a common autonomy software stack with an aim of end-to-end map-based navigation to achieve the ODD-specific objective(s) for each vehicle. Finally, we also discuss the flexibility of the proposed framework to support virtual, hybrid as well as physical testing with seamless sim2real transfer.
Read more5/8/2024
0
Digital Twins Meet the Koopman Operator: Data-Driven Learning for Robust Autonomy
Chinmay Vilas Samak, Tanmay Vilas Samak, Ajinkya Joglekar, Umesh Vaidya, Venkat Krovi
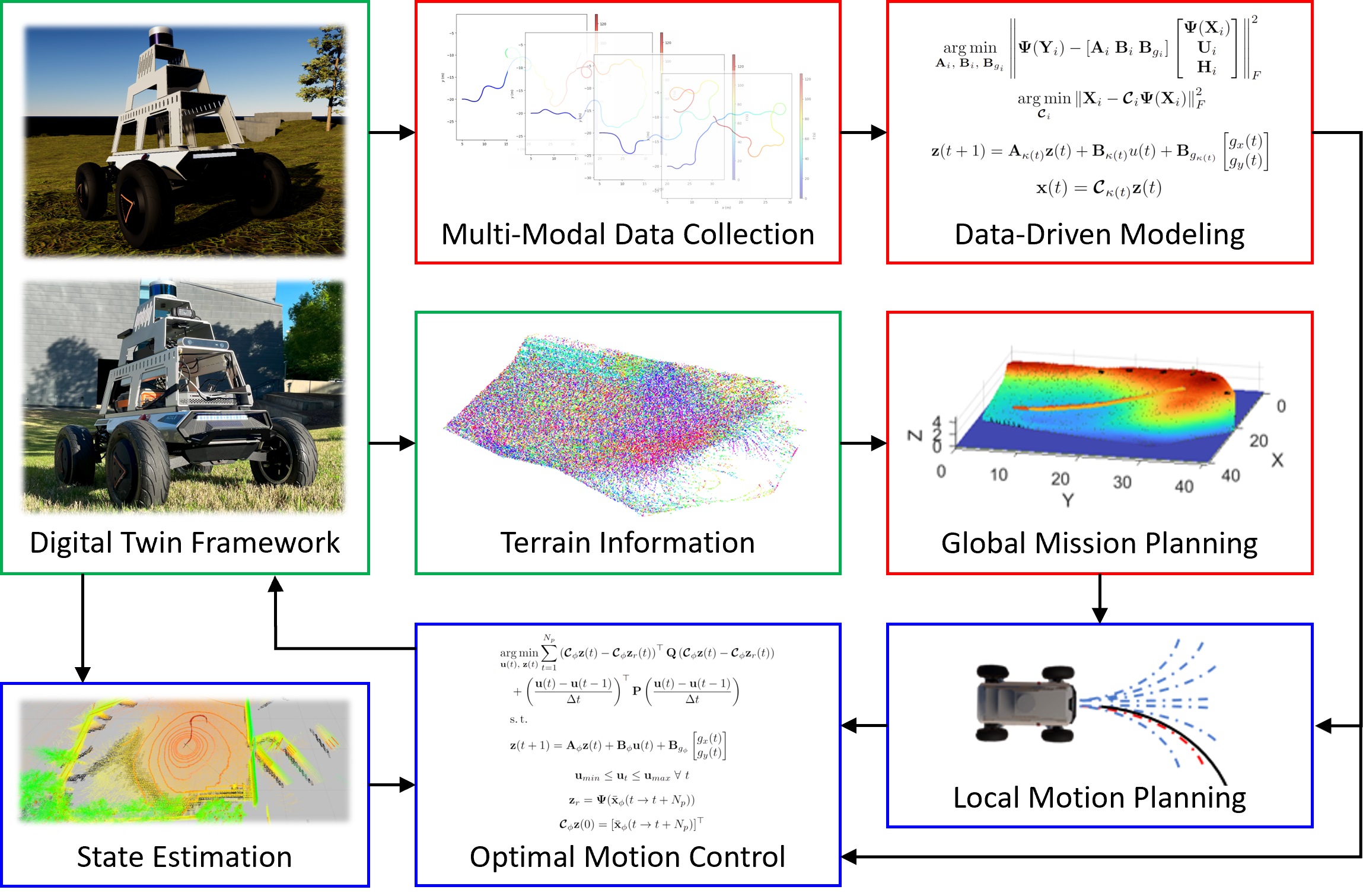
Contrary to on-road autonomous navigation, off-road autonomy is complicated by various factors ranging from sensing challenges to terrain variability. In such a milieu, data-driven approaches have been commonly employed to capture intricate vehicle-environment interactions effectively. However, the success of data-driven methods depends crucially on the quality and quantity of data, which can be compromised by large variability in off-road environments. To address these concerns, we present a novel workflow to recreate the exact vehicle and its target operating conditions digitally for domain-specific data generation. This enables us to effectively model off-road vehicle dynamics from simulation data using the Koopman operator theory, and employ the obtained models for local motion planning and optimal vehicle control. The capabilities of the proposed methodology are demonstrated through an autonomous navigation problem of a 1:5 scale vehicle, where a terrain-informed planner is employed for global mission planning. Results indicate a substantial improvement in off-road navigation performance with the proposed algorithm (5.84x) and underscore the efficacy of digital twinning in terms of improving the sample efficiency (3.2x) and reducing the sim2real gap (5.2%).
Read more9/17/2024
🎯
0
An Advanced Framework for Ultra-Realistic Simulation and Digital Twinning for Autonomous Vehicles
Yuankai He, Hanlin Chen, Weisong Shi
Simulation is a fundamental tool in developing autonomous vehicles, enabling rigorous testing without the logistical and safety challenges associated with real-world trials. As autonomous vehicle technologies evolve and public safety demands increase, advanced, realistic simulation frameworks are critical. Current testing paradigms employ a mix of general-purpose and specialized simulators, such as CARLA and IVRESS, to achieve high-fidelity results. However, these tools often struggle with compatibility due to differing platform, hardware, and software requirements, severely hampering their combined effectiveness. This paper introduces BlueICE, an advanced framework for ultra-realistic simulation and digital twinning, to address these challenges. BlueICE's innovative architecture allows for the decoupling of computing platforms, hardware, and software dependencies while offering researchers customizable testing environments to meet diverse fidelity needs. Key features include containerization to ensure compatibility across different systems, a unified communication bridge for seamless integration of various simulation tools, and synchronized orchestration of input and output across simulators. This framework facilitates the development of sophisticated digital twins for autonomous vehicle testing and sets a new standard in simulation accuracy and flexibility. The paper further explores the application of BlueICE in two distinct case studies: the ICAT indoor testbed and the STAR campus outdoor testbed at the University of Delaware. These case studies demonstrate BlueICE's capability to create sophisticated digital twins for autonomous vehicle testing and underline its potential as a standardized testbed for future autonomous driving technologies.
Read more5/3/2024